






准备使用 mid 40 + IMU 的 Fast-LIO 算法。
Step 1 环境的准备
-
serial 包的安装
sudo apt-get install ros-melodic-serial -
官方库 中有许多文件夹。其中 /ROS_Noetic/serial_imu_ws/src/ 下面所有的文件都是需要的。自己新建一个工作目录,然后把这两个文件放到一个 src 下面。建立好的如下图。
ws - src - imu_launch - serial_port - CMakeLists.txt
问题:是否需要初始化工作空间?需要回到 ws 下,进行 catkin_make
Step 2 接收数据
-
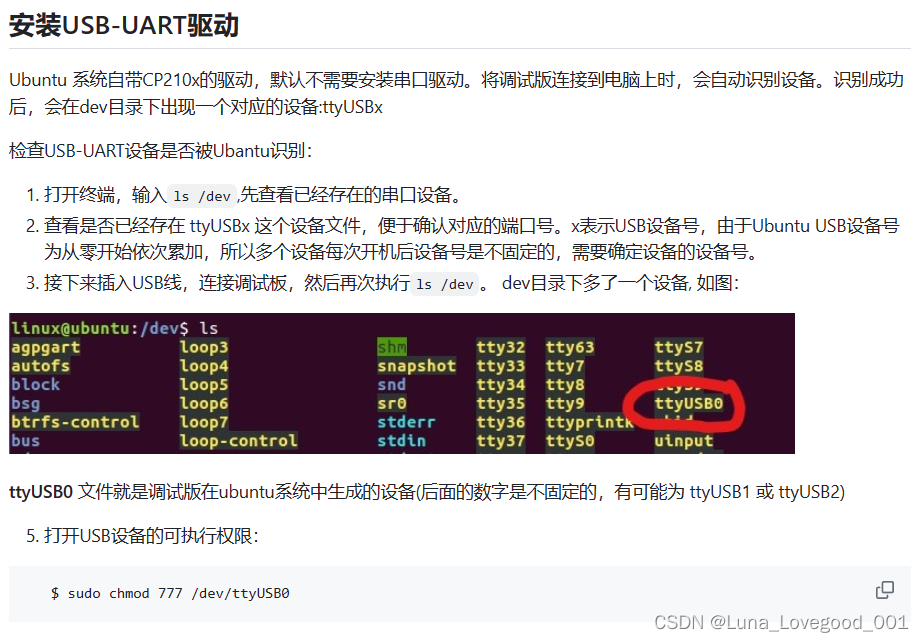
安装 USB-UART 驱动。如下图。
-
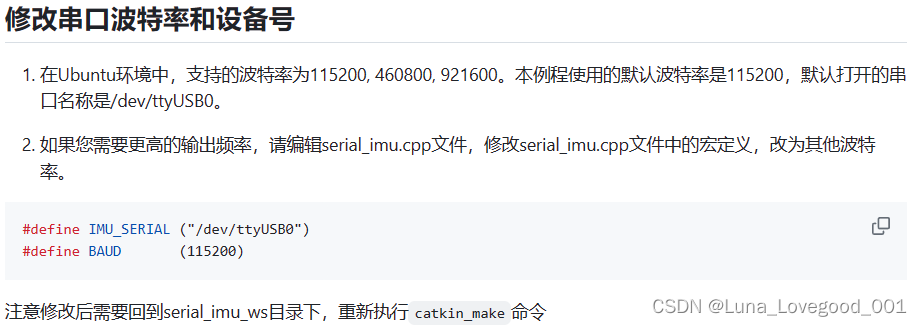
修改串口波特率和设备号
-
安装ROS serial软件包
$ sudo apt-get install ros-melodic-serial -
显示数据
- 输出ROS标准 Imu.msg,确保有数据。
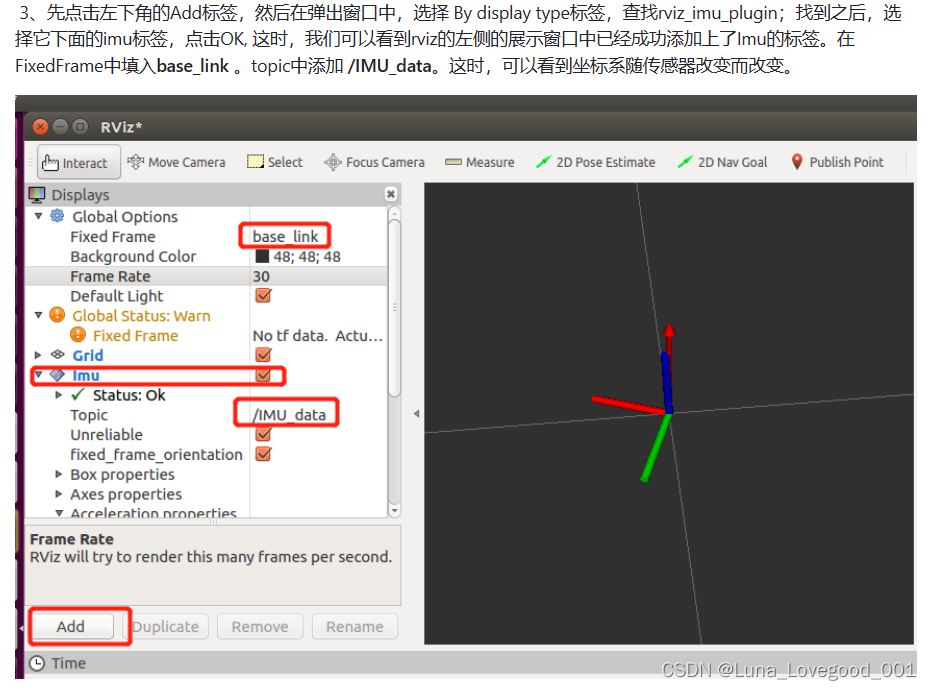
如果有数据的话会有数据不断出现,说明可以下一步。$ roslaunch imu_launch imu_msg.launch - [重点] rivz 可视化数据
1. 安装 ros-melodic-imu-tools 工具,命令自己找,就一行。
2. 做如下修改
- 输出ROS标准 Imu.msg,确保有数据。















 1177
1177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









