










目录
写在前面
1、本文内容
激光slam学习及问题记录
2、平台
ubuntu 1804, ros
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/125271212
资料
论文
2021 SLAM会议论文汇总 https://zhuanlan.zhihu.com/p/439932294
PLC-LiSLAM: 基于面、线与圆柱体的激光SLAM https://mp.weixin.qq.com/s/QM1tU04cBObmTjfJAYLPnA
源码
loam
https://github.com/HKUST-Aerial-Robotics/A-LOAM
loam源码解析1 : scanRegistration(一)https://blog.csdn.net/weixin_44156680/article/details/117919636

lego_loam
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
LeGO-LOAM 源码阅读笔记(featureAssociation.cpp)https://blog.csdn.net/wykxwyc/article/details/98317544
LeGO-LOAM源码解析3: featureAssociation(一) https://blog.csdn.net/weixin_44156680/article/details/118228001
livox_loam
https://github.com/hku-mars/loam_livox
ekf_loam
https://github.com/ITVRoC/ekf_loam
r3live
https://github.com/hku-mars/r3live
编译cv_bridge
https://www.likecs.com/show-203272698.html
error: return-statement with no value, in function returning ‘void*’ [-fpermissive]
https://blog.csdn.net/qq_18276949/article/details/107014026
海康Camera MVS Linux SDK二次开发封装ROS packge过程记录(c++):
https://blog.csdn.net/weixin_41965898/article/details/116801491
海康威视在linux下使用笔记——ros驱动相机:
https://blog.csdn.net/weixin_46187561/article/details/120876109
https://github.com/luckyluckydadada/HIKROBOT-MVS-CAMERA-ROS
相机和激光雷达标定外参:
https://github.com/hku-mars/livox_camera_calib
其他
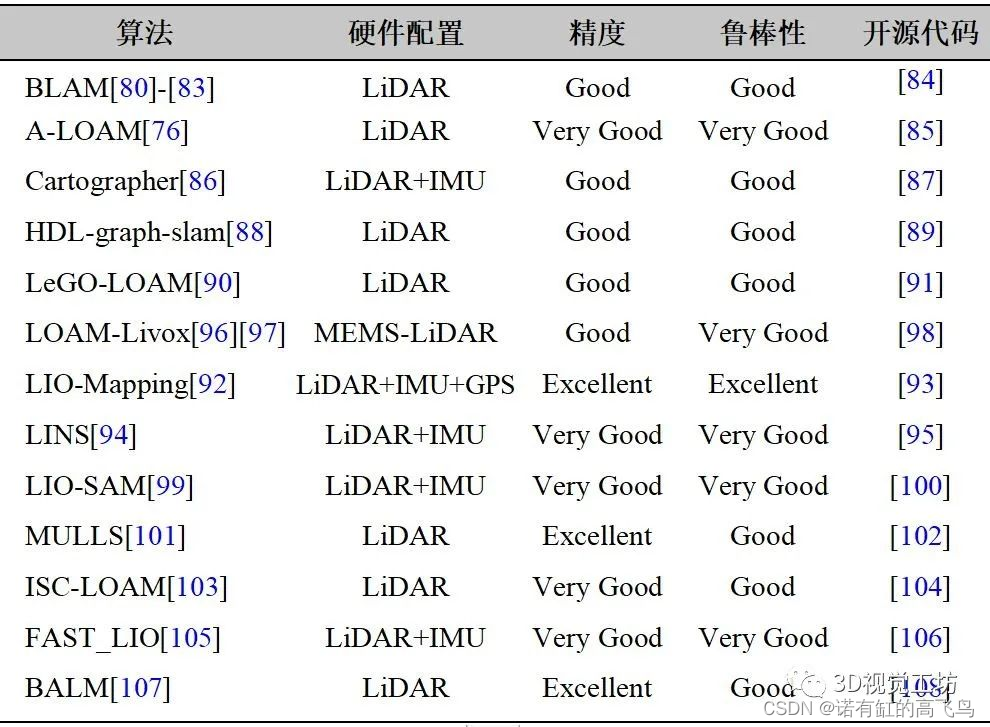
代表性激光SLAM算法论文与开源代码总结
https://zhuanlan.zhihu.com/p/424638140
2021 SLAM会议论文汇总
https://zhuanlan.zhihu.com/p/439932294
古月居slam
https://www.guyuehome.com/Blog/index/category/22/p/2
博客https://blog.csdn.net/weixin_41281151?type=blog
loam:
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集https://zhuanlan.zhihu.com/p/432520314
十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析https://zhuanlan.zhihu.com/p/441386977
多传感器融合SLAM、导航研究和学习 https://www.zhihu.com/column/c_1372631607124353024
orb-slam和orb-slam2
http://webdiis.unizar.es/~raulmur/orbslam/
SLAM算法工程师之路:A-LOAM论文研读与框架算法学习 https://zhuanlan.zhihu.com/p/431082432
考虑到各框架里的算法原理深度、模块架构、上手调试难度等情况,笔者认为最适合基础学习与记录的算法是A-LOAM。在学习并对A-LOAM有一个较好的掌握之后,再回头研究其他的框架比较合适(这里给出一个建议学习顺序:A-LOAM-> LOAM -> LEGO-LOAM -> LIO-SAM-> LVI-SAM)。A-LOAM是由Ji Zhang博士在论文《Lidar Odometry and Mapping in Real-time》[1]中提出的,使用激光雷达高效完成自身在空间的定位与三维建图。
3D激光SLAM:ALOAM:激光雷达的运动畸变补偿代码解析 https://blog.csdn.net/qq_32761549/article/details/120738568
LOAM:3D激光里程计及环境建图的方法和实现(三) https://zhuanlan.zhihu.com/p/29939195
LOAM论文和程序代码的解读
https://blog.csdn.net/robinvista/article/details/104379087
编译&调试
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试
https://zhuanlan.zhihu.com/p/364972107
【ROS】 在VScode中 ROS Debug 配置方法非常详细版 https://blog.csdn.net/qq_39537898/article/details/124904363
vscode利用cmake调试 https://blog.csdn.net/code_segment/article/details/81151443
ORB-slam2编译时报错‘usleep’ was not declared in this scope
https://blog.csdn.net/Evanismlii/article/details/112346365
卡尔曼滤波
FAST-LIO论文知识补充—卡尔曼滤波 https://zhuanlan.zhihu.com/p/485454339
详解卡尔曼滤波原理 https://blog.csdn.net/u010720661/article/details/63253509
仿真
https://blog.csdn.net/qq_32761549/article/details/125654079
slam文章
从零开始一起学习SLAM | 为啥需要李群与李代数?
2021年度十大开源SLAM算法 https://visionary.blog.csdn.net/article/details/122325684
重磅!ICRA 2022盘点:SLAM方向十大重点论文解读 https://mp.weixin.qq.com/s/N32S_vF0E9ZVa4yI_F4aAQ
论文笔记_SLAM_综述十几篇_目录 https://visionary.blog.csdn.net/article/details/104299742
imu
SLAM_相机与imu的融合基础知识https://blog.csdn.net/shyjhyp11/article/details/115215724
从零开始的 IMU 状态模型推导https://fzheng.me/2016/11/20/imu_model_eq/
(Rv)^ = Rv^R’ 的简单证明
欧拉积分、中点积分与龙格-库塔积分http://www.liuxiao.org/2018/05/%e6%ac%a7%e6%8b%89%e7%a7%af%e5%88%86%e3%80%81%e4%b8%ad%e7%82%b9%e7%a7%af%e5%88%86%e4%b8%8e%e9%be%99%e6%a0%bc%ef%bc%8d%e5%ba%93%e5%a1%94%e7%a7%af%e5%88%86/
数值积分方法(1)——龙格库塔积分https://zhuanlan.zhihu.com/p/536391602
VIO中的IMU数值积分与IMU预积分 https://zhuanlan.zhihu.com/p/107032156
IMU误差模型 https://zhuanlan.zhihu.com/p/71202815
SLAM原理深度解析(11):IMU基础 https://zhuanlan.zhihu.com/p/492669984
imu预积分原理的个人理解 https://zhuanlan.zhihu.com/p/438525032
超核IMU HI226 陀螺仪 ROS 数据读取 https://zhuanlan.zhihu.com/p/165035327
https://www.zhihu.com/zvideo/1272115149693267968
ROS读IMU(CH110)数据 https://blog.csdn.net/Will_Ye/article/details/116401523
imu仿真
imu_data_simulation https://github.com/robosu12/imu_data_simulation
imu计算轨迹matlab
https://zhuanlan.zhihu.com/p/362145425
https://github.com/xioTechnologies/Oscillatory-Motion-Tracking-With-x-IMU
利用IMU数据来计算位移
https://blog.csdn.net/er_dan_love/article/details/123020143
多传感器融合定位 第九章 基于优化的建图方法(深蓝学院笔记)
https://blog.csdn.net/weixin_41281151/article/details/123406337
SLAM_关于VIO中IMU预积分的讲解https://blog.csdn.net/shyjhyp11/article/details/115403769
【从kitti开始自动驾驶】–9.2 利用IMU得到的速度画出自己的轨迹https://blog.csdn.net/Eric_Sober/article/details/124442988
LOAM中关于坐标转换与IMU融合https://blog.csdn.net/u012700322/article/details/103615287
四元数
Understanding Quaternions 中文翻译《理解四元数》 https://www.qiujiawei.com/understanding-quaternions/
其他
相机和livox激光雷达外参标定:在gazebo中搭建仿真场景 https://www.guyuehome.com/Blog/index/category/22/p/2
使用 SVD 方法求解 ICP 问题 http://www.liuxiao.org/2019/08/%e4%bd%bf%e7%94%a8-svd-%e6%96%b9%e6%b3%95%e6%b1%82%e8%a7%a3-icp-%e9%97%ae%e9%a2%98/
问题
livox_loam
运行基于MID-40雷达的LOAM_LIVOX算法的全过程 https://blog.csdn.net/weixin_48083022/article/details/119043406
需要pcl1.9以上版本
https://blog.csdn.net/weixin_48083022/article/details/119043406
Ubuntu18.04安装PCL(详细教程) https://www.guyuehome.com/10039
Ubuntu18.04安装PCL 1.9.1(图文详解,附踩坑和测试) https://blog.csdn.net/qq_42257666/article/details/124574029
编译pcl时遇到问题:
/usr/lib/x86_64-linux-gnu/libSM.so:对‘uuid_unparse_lower@UUID_1.0’未定义的引用
解决:
把anaconda3/lib里面的libuuid.xxx文件先移动到其他地方
https://www.codeleading.com/article/14915214739/
https://www.jianshu.com/p/459d4242b3d0
参考
文中已列出
完
如有错漏,敬请指正
















 134
134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











