







自动泊车系统的路径规划是车辆在获取了周围环境信息后开始的,进行路径规划的前提是系统检测到有效车位,然后结合车辆和车位的相对位置、车辆自身运动学、车辆初始位姿、道路边界等约束条件,以车辆参考点行驶轨迹为设计对象,生成起始点至泊车终止点的路径曲线,且路径曲线需满足连续、避障和易于跟踪等条件。
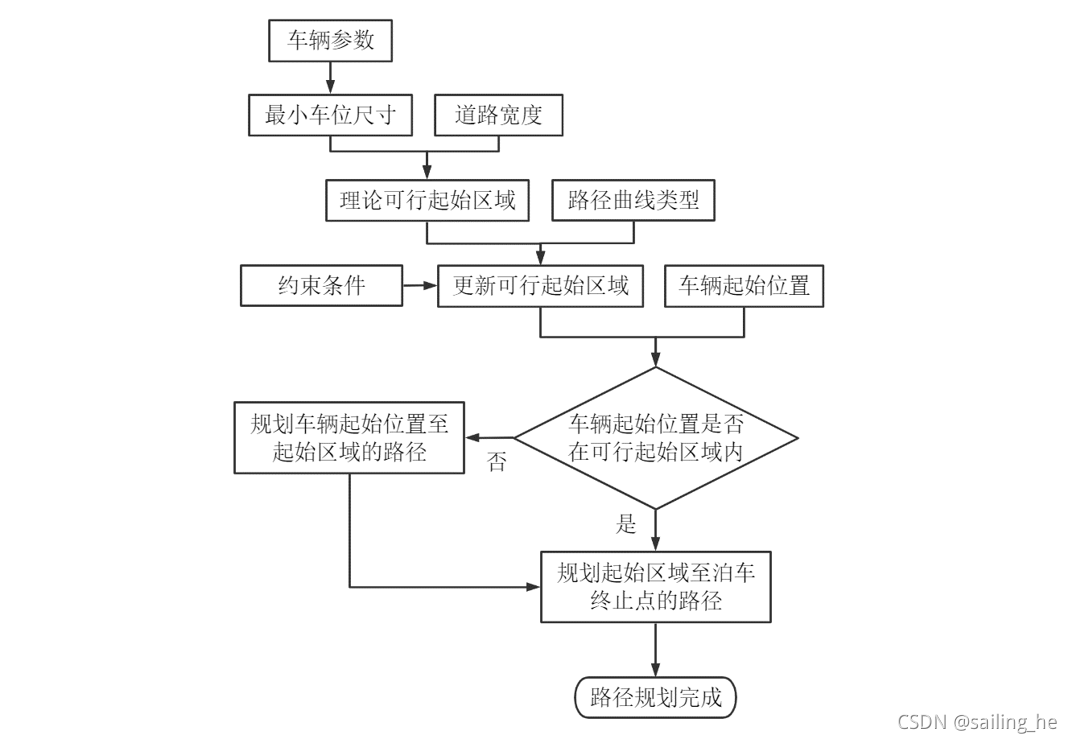
路径规划的基本结构如下图所示,首先,根据车辆相关参数确定所需最小车位尺寸;然后,结合车位尺寸和道路宽度信息,推导出理论可行泊车起始区域;接着,根据泊车过程的约束条件和泊车曲线类型,对理论可行起始区域进行更新,得到实际满足泊车要求的起始区域;最后,根据车辆起始点位置和泊车终止点位置,规划泊车路径。
1、平行泊车运动过程
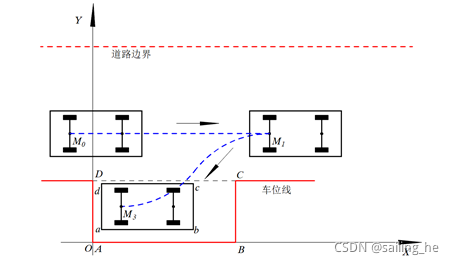
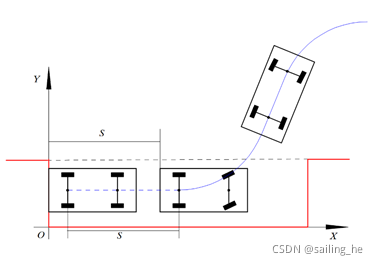
平行泊车的运动过程可以表示为:首先,控制器控制车辆向前行驶,行驶过程中尽可能保持车辆与车位平行,保持车辆与右侧物体和左侧道路边界的安全距离,行驶过程中实时检测侧方车位是否满足要求;当检测到有效车位后,系统根据车辆此时的位姿信息和车位信息,控制车辆采用前进或后退的方式,行驶至满足泊车条件的可行起始区域;然后,在满足车辆自身运动学约束条件下,控制器控制车辆沿期望泊车路径行驶,直至车辆行驶到路径终止点,泊车结束时车身姿态与车位保持平行,并且前轮转角和方向盘应处于回正状态。
2、车辆运动学分析
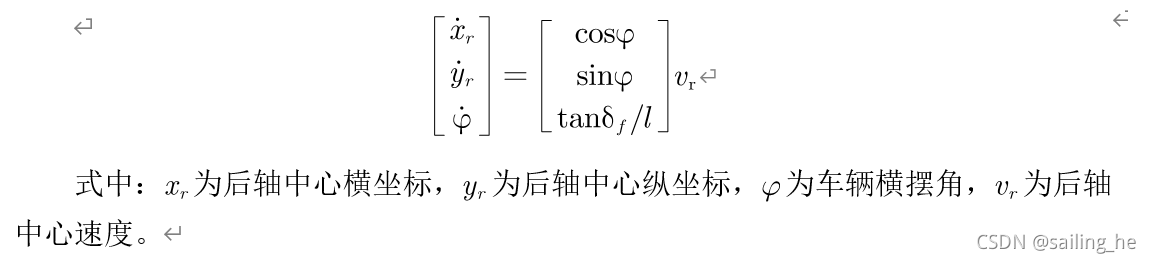
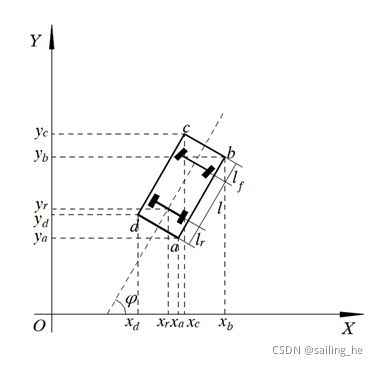
由于泊车过程车辆处于低速运动状态,车速一般不会超过10km/h ,假设泊车过程中车轮不会受到侧向力的影响,不会发生侧向滑动,因此可以用车辆运动学模型代替车辆模型。根据车辆运动学关系,以车辆后轴中心为参考,建立如下所示的车辆运动学模型:
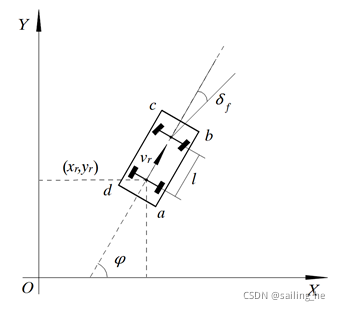
泊车过程为了避免车辆与周围其他物发生碰撞,需要清楚的知道车身四个顶点的坐标信息。根据上文计算得到的车辆后轴中心坐标,结合车辆横摆角信息,根据上图中的几何关系,可以得出车身各顶点坐标与后轴中心坐标的关系表达式:

3、最小车位尺寸参数
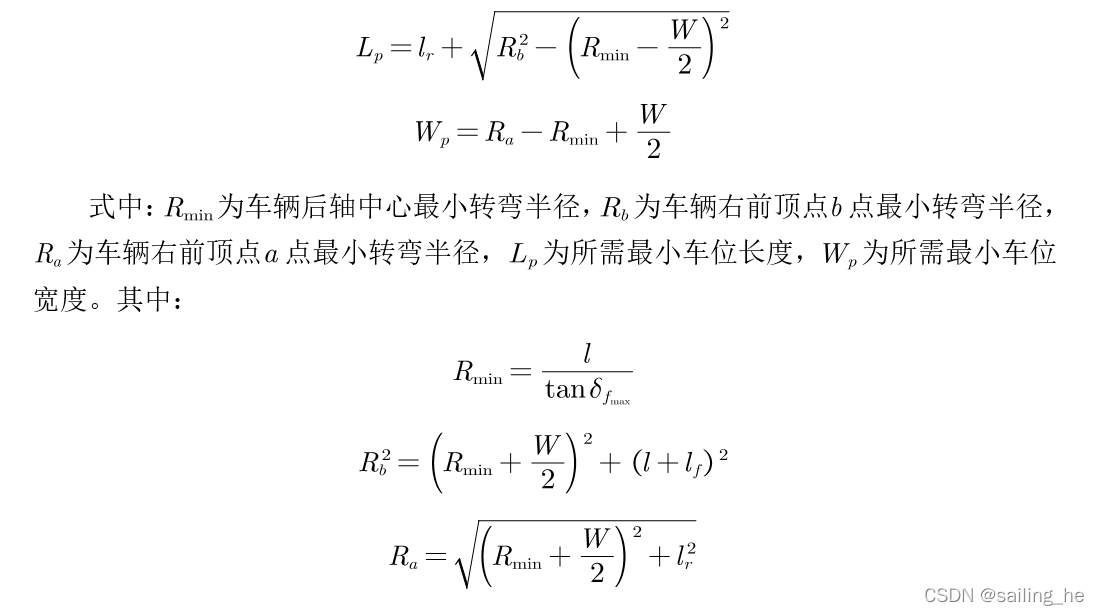
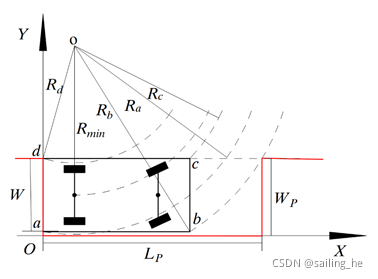
以单步泊车路径为例,假设车辆后轴中心位于泊车路径终止点,控制车辆按照最小转弯半径向前行驶,如果车辆能顺利驶出车位且不与车位发生碰撞,由此可以计算出最小车位尺寸。根据图中的几何关系,可以计算出所需最小车位尺寸为:
由于前文的最小车位尺寸公式是按照车辆最小转弯半径确定的,车辆行驶到路径终止点时前轮转角还处于最大转角位置,泊车结束时还需要控制车辆原地转向。因此,单步泊车路径规划时,为了避免原地转向造成轮胎和转向机构的加剧磨损,需要保证泊车完成时前轮转角处于回正状态,需要适当增加车位长度
根据泊车允许的最大车速和前轮转角转速,可以计算出需要增加的车位长度为:

由于为了避免原地转向的情况,上述方法确定的车位尺寸考虑了前轮转角回正需要的行驶距离,计算出的车位尺寸偏大,现实情况的车位尺寸不易满足此条件。因此后续首先针对满足条件的车位场景,进行了单步泊车路径规划,然后考虑车位尺寸偏小场景,单步泊车路径不能满足泊车条件时,进行了两步泊车路径规划。当车辆检测到目标车位时,系统可根据检测的车位尺寸进行判断,选用合适的泊车路径。


















 8158
8158

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











