







 本文详细探讨了MATLAB在8.1和8.2章节中的平行泊车路径规划,涉及不同起始区域、工况分析和库内姿态调整。通过CAD模型仿真验证路径的避障、平行性和连续性,满足车辆轨迹约束。
本文详细探讨了MATLAB在8.1和8.2章节中的平行泊车路径规划,涉及不同起始区域、工况分析和库内姿态调整。通过CAD模型仿真验证路径的避障、平行性和连续性,满足车辆轨迹约束。
8 平行泊车路径规划仿真
此节对应的matlab代码
全文包含的CAD图片,本大章里的图片除了matlab画的,基本都是用CAD画的,图片的CAD模型下载链接
8.1 不同起始区域的路径规划仿真
根据前文计算得到的车位尺寸和起始区域,选用车位尺寸为长7m、宽2.2m,考虑泊车完成时车辆与车位边界的安全距离,设置泊车终止点坐标为(0.8,1.1),任取区域中的点进行仿真分析,查看路径是否满足泊车要求。
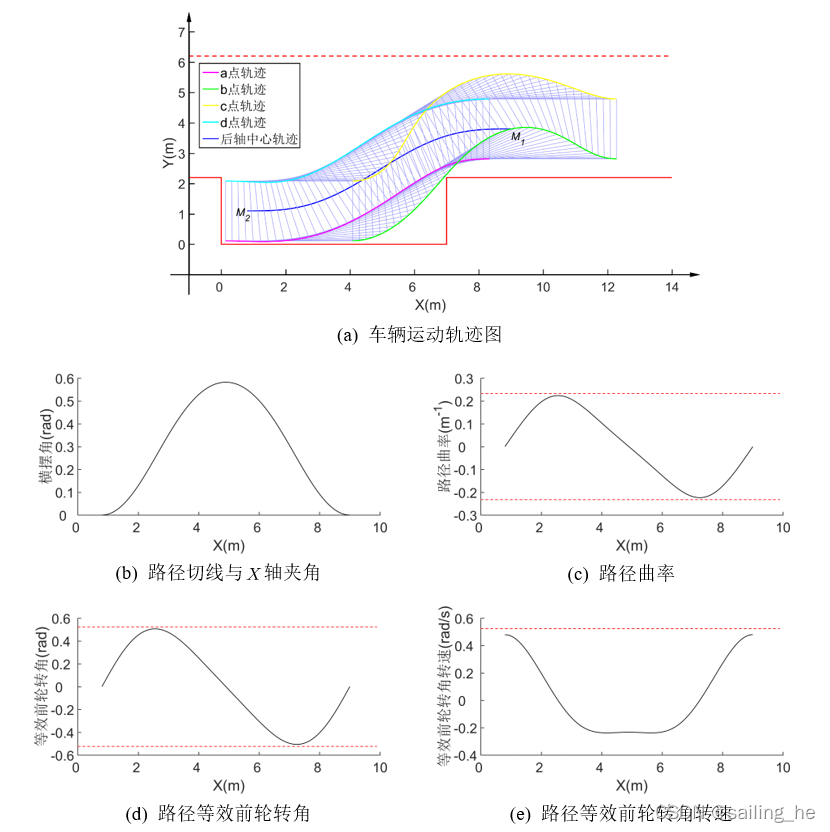
(1)工况一:当车辆起始点位于区域1时,在区域中任取一点(9.3.8)进行仿真分析,仿真结果如下图所示。从图(a)中可以看出,车辆后轴中心沿路径M1M2行驶时,车身各顶点的运动轨迹没有与车位边界线和道路边界线发生接触,车辆轮廓没有与车位边界和道路边界发生接触,说明路径满足泊车过程的避撞约束条件。由图(b)可知,路径在起始点M1点和终止点M2点处的切线与X轴的夹角为零,即表示在路径起始点和终止点处车身姿态与车位平行。由图©可知,路径起始点和终止点处的曲率为0,且路径曲率变化连续,车辆沿路径行驶时,避免了车辆原地转向的情况;路径最大曲率未超过车辆后轴中心最小转弯半径对应的曲率,满足车辆最小转弯半径约束。由图(d)可知,路径对应的等效前轮转角变化连续,且等效前轮转角最大未超过车辆前轮转角最大值 ,满足车辆前轮转角的约束。由图(e)可知,当车辆以泊车过程允许的最大车速行驶时,路径对应的等效前轮转角转速变化连续,等效前轮转角转速最大值未超过车辆前轮转角转速最大值 ,满足车辆前轮转角转速的约束。因此,说明所规划的路径具有较好的可跟踪性,能够满足泊车条件。
(2)工况2:当车辆起始点位于区域2时,在区域中任取一点(10,3.5)进行仿真分析,仿真结果如下图所示,结果分析与上文类似,这里不再阐述。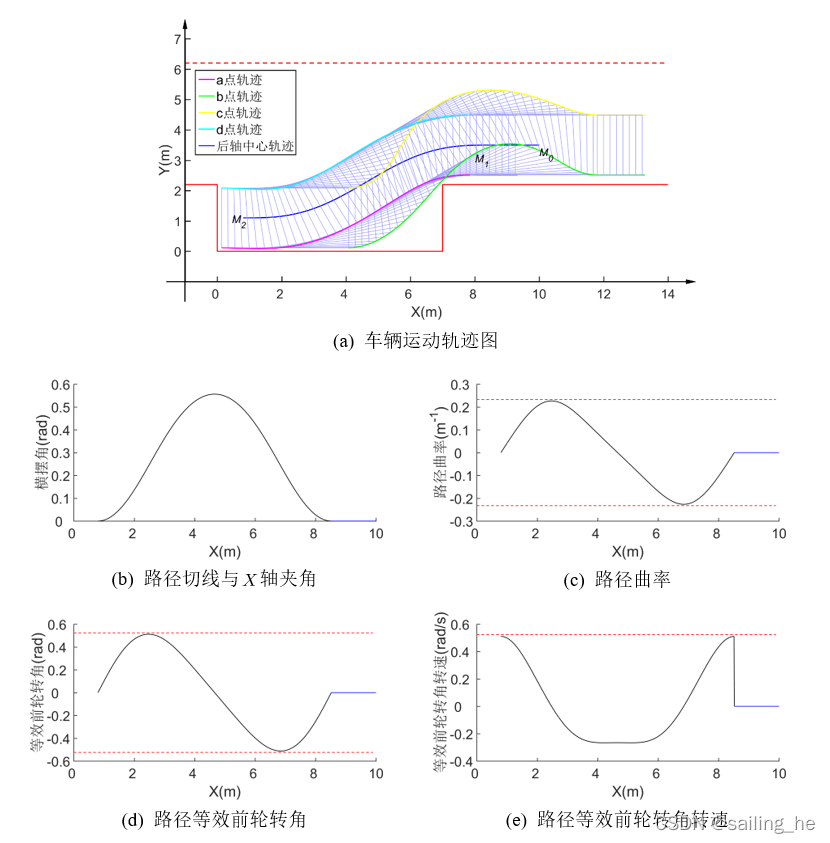
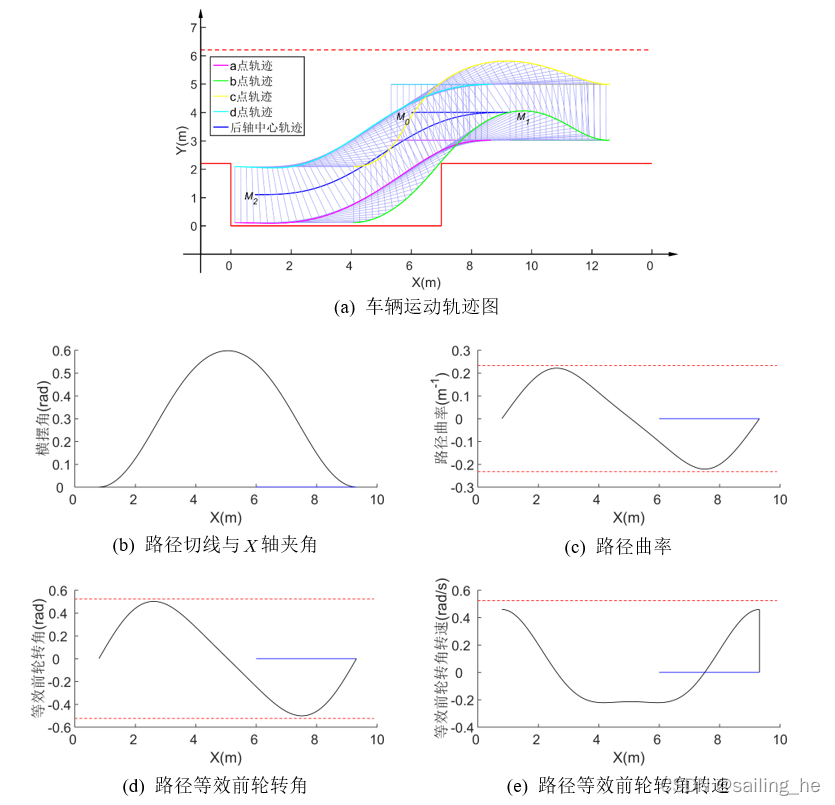
(3)工况3:当车辆起始点位于区域3时,在区域中任取一点(6,4)进行仿真分析,仿真结果如下图所示,结果分析与上文类似,这里不再阐述。
8.2 库内姿态调整路径规划仿真
当实际车位尺寸不能满足单步泊车路径要求时,需要进行两步泊车路径规划。参考《车库建筑设计规范》,车位长度尺寸一般为1.5倍车长,根据选用的车辆参数,可以确定正常车位长度尺寸约为6m,考虑泊车过程车辆与前后车位之间的安全距离,并且如果车位很小,车辆将不能成功泊车入位,综合考虑设置偏小的车位尺寸为长5.8m、宽2.2m 。
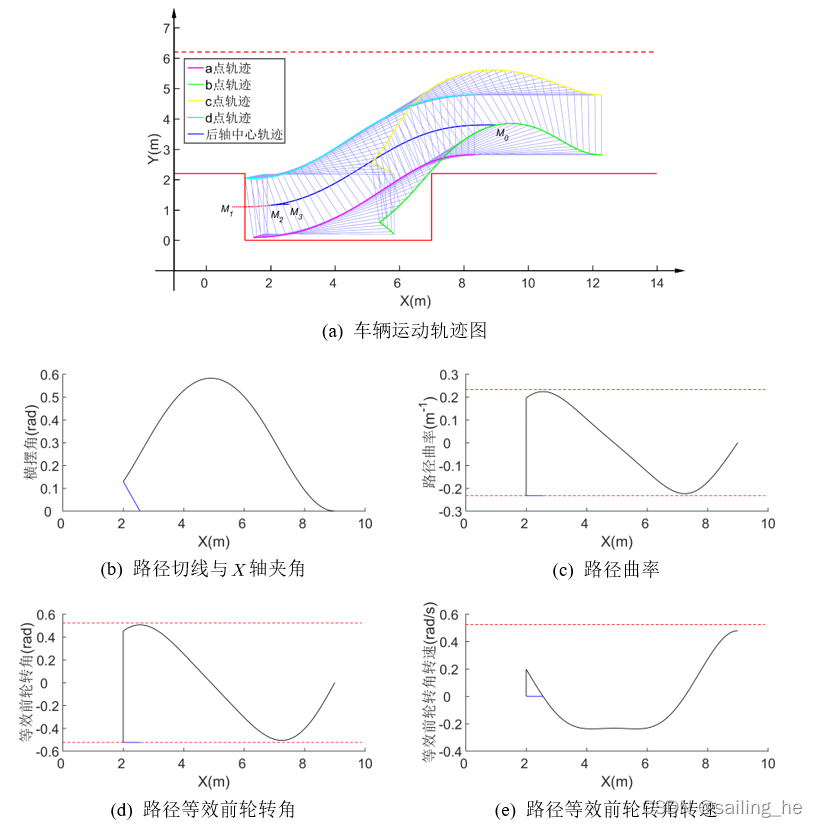
在区域1中任取一点进行仿真分析,仿真结果如下图所示,图(b-e)中蓝线表示路径M2M3的数据,黑线表示路径M0M2的数据。由图(a)可知,车辆首先沿原始路径行驶,当车辆后轴中心行驶到M2点时,车辆后侧轮廓线已经与车位后侧边界线发生接触,此时控制车辆以最大前轮转角向前行驶,泊车过程中车身各顶点的运动轨迹没有与车位线和道路边界线发生接触,车辆轮廓没有超过车位边界和道路边界,说明路径满足泊车过程的避撞约束条件。由图(b)可知,路径起始点M0点和泊车终止点M3点处的切线与X轴的夹角为零,即路径起始点和终止点处车身与车位平行,但在M2点时,车辆存在原地转向情况,并且还需要控制档位切换。由图©可知,路径起始点曲率为0,当车辆行驶到M2点时,由于车辆需按照最小转弯半径向前行驶,因此路径曲率将发生突变。由图(d)可知,路径对应的等效前轮转角变化范围未超过车辆前轮转角最大值0.524rad ,满足车辆前轮转角的约束,当车辆行驶到M2点时,转角发生突变,突变后等效前轮转角大小保持在0.524rad 。由图(e)可知,当车辆以泊车过程允许的最大车速行驶时,路径对应的等效前轮转角转速变化范围未超过车辆前轮转角转速最大值 ,满足车辆前轮转角转速的约束,当车辆行驶到M2点后,转角保持在最大位置,等效前轮转角转速将不再发生变化。综上可知,所规划的两段路径能够满足泊车条件。
小节
本节研究了平行泊车系统的路径规划方法,首先根据车辆参数计算出所需最小车位尺寸和理论可行泊车起始区域;然后分析对比了多种平行泊车路径规划方法的优缺点,最终选取了曲率连续且易于车辆跟踪的等速偏移和正弦曲线的叠加曲线作为本文的泊车路径;接着针对车辆初始位置的不确定性,对泊车起始区域进行了划分,对于不同的区域规划了不同的泊车路径,针对车位尺寸较小情况规划了库内姿态调整,讨论了泊车过程出现障碍物时的路径选取;最后进行了路径仿真分析,验证了路径的可行性。


















 3059
3059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











