







T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction
I. INTRODUCTION
(1) Spatial dependence
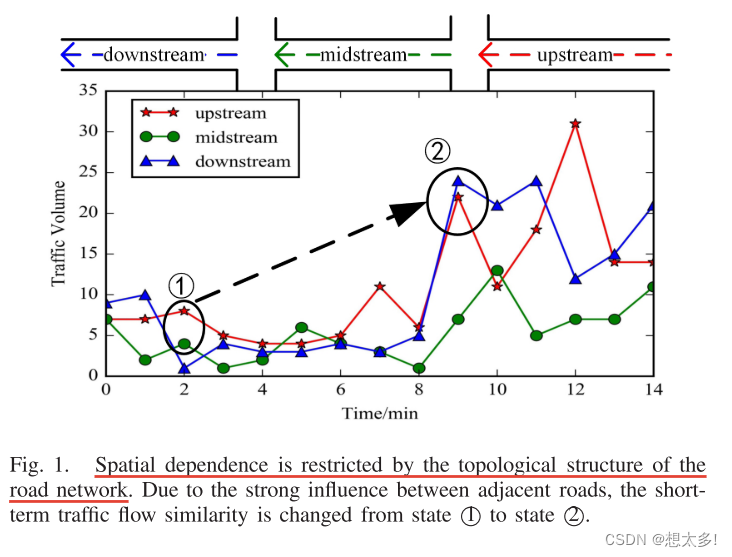
由于相邻道路间影响较强,短期相似度由状态1(上游道路与中游道路相似)变为状态2(上游道路与下游道路相似)
(2) Temporal dependence
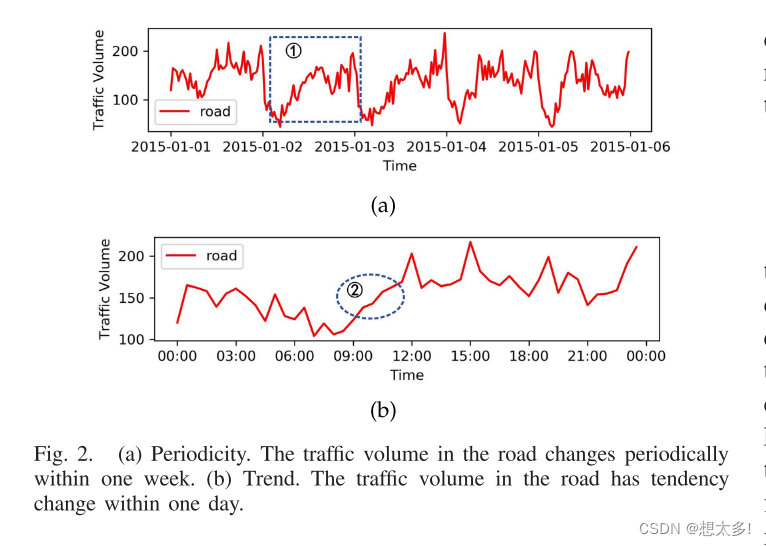
(a)周期性。 道路中的交通量在一周内呈周期性变化。
(b)趋势。 道路交通量在一天内有趋势性变化。
III. METHODOLOGY
A. Problem Definition
Definition 1: road network G
Definition 2: feature matrix XN×P
问题转换为求映射函数 f (式1)

- n 是历史时间序列的长度
- t 是需要预测的时间序列的长度
B. Overview
Figure 3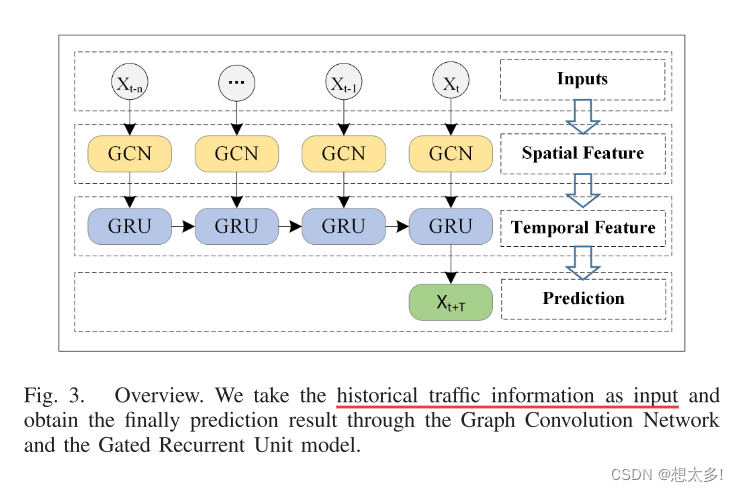
- 首先,以历史的N个时间序列数据作为输入,利用图卷积网络捕捉城市道路网络的拓扑结构,获得城市道路网络的空间特征。
- 其次,将获得的具有空间特征的时间序列输入到门控递归单元模型中,通过单元之间的信息传递获得动态变化,捕捉时间特征。
- 最后,我们通过全连通层得到结果。
C. Methodology
1) Spatial Dependence Modeling
传统CNN只能用于欧式空间,获取局部空间特征。
一个城市道路网是以图形的形式而不是二维网格的形式,因此采用GCN从交通数据中学习空间特征。
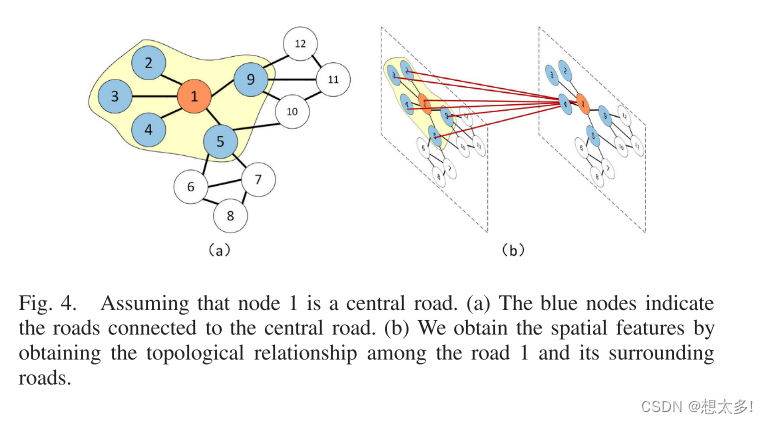
如图4所示,假设节点1是一条中心道路,GCN模型可以获得中心道路与其周边道路的拓扑关系,对道路网络的拓扑结构和道路上的属性进行编码,进而获得空间依赖关系。
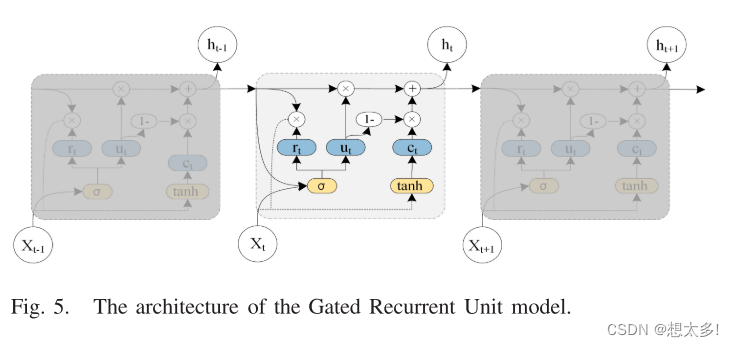
2) Temporal Dependence Modeling
Fig. 5
GRU以时刻t-1的隐藏状态和当前交通信息作为输入,获取时刻t的交通信息。
3) Temporal Graph Convolutional Network
Fig. 6
左侧为时空流量预测过程,右侧为T-GCN的具体结构,式4–7
HT-1表示时间t-1的输出,GC表示图卷积过程,UT、RT为时间t的更新门和复位门,HT表示时间t的输出。
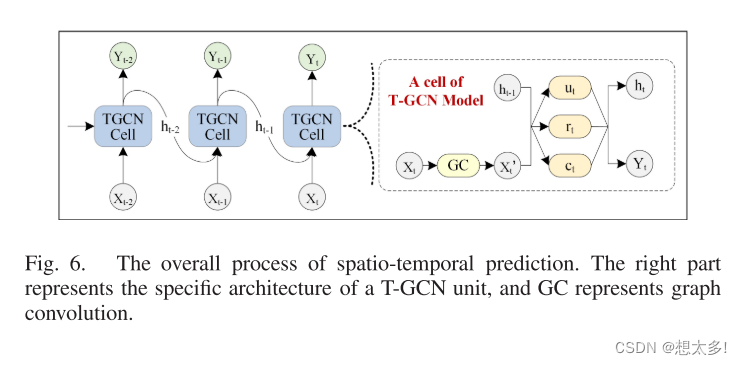
总之,T-GCN模型能够处理复杂的空间依赖性和时间动力学,最终实现交通预测任务。
4) Loss Function

式8,yt和yt^(hat)分别表示实际交通速度和预测速度;L2正则化项,λ是超参数用于避免过拟合
IV. EXPERIMENTS
V. CONCLUSION
本文提出了一种新的基于神经网络的交通预测方法T-GCN,该方法将GCN和GRU相结合。 利用图网络对城市道路网络进行建模,图上的节点表示道路,边表示道路之间的连接关系,道路上的交通信息被描述为图上节点的属性。 一方面,利用GCN捕获图的空间拓扑结构,获得图的空间相关性; 另一方面,引入GRU模型来捕捉节点属性的动态变化,以获得节点的时间依赖性。 最后将T-GCN模型应用于时空流量预测任务。 在两个真实的交通数据集上,通过与HA模型、ARIMA模型、SVR模型、GCN模型和GRU模型的比较,T-GCN模型在不同的预测水平下都取得了较好的性能。 此外,扰动分析说明了我们的方法的鲁棒性。 综上所述,T-GCN模型成功地从交通数据中捕捉到了时空特征,可以应用于其他时空任务。















 3306
3306











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









