









roll pitch yaw
欧拉角的绕轴旋转顺序通常是相对于当前惯性坐标系的。这意味着欧拉角的定义取决于所选择的坐标系。通常情况下,我们使用固定的惯性坐标系。
例如,在欧拉角的常见表示中,通常使用绕固定的坐标系的三个轴进行旋转,通常称为 roll(绕 x 轴)、pitch(绕 y 轴)和 yaw(绕 z 轴)。这种旋转顺序可以记作 XYZ(绕 x、y、z 轴的顺序)或者是 ZYX(绕 z、y、x 轴的顺序),具体取决于约定。
图形标准
在DX中,为
v
×
r
o
l
l
×
p
i
t
c
h
×
y
a
w
v\times{roll}\times{pitch}\times{yaw}
v×roll×pitch×yaw;
在opengl中,为
y
a
w
×
p
i
t
c
h
×
r
o
l
l
×
v
yaw\times{pitch}\times{roll}\times{v}
yaw×pitch×roll×v;
UE和Unity
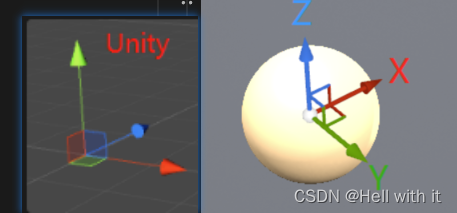
- 在Unity中
- Unity的前方是z轴,
- roll:Z
- pitch:X
- yaw:Y
- 内旋:YXZ
- 外旋:ZXY
- Unity的前方是z轴,
- 在UE中
- UE的前方是X轴,以下仅在UE中成立
- roll:绕x轴
- pitch:y
- yaw:z
- 内旋:Z->Y->X
- 外旋:X->Y->Z
- UE的前方是X轴,以下仅在UE中成立

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









