







1 rosdep作用
ros 的功能包有用到第三方的功能包,可能没有默认安装,需要添加依赖;而rosdep就是用来添加依赖的
检查依赖是否缺失:
rosdep check --from-path src
添加缺失的依赖:
rosdep install --from-path src -y
注意:都是在工作空间的目录下输入指令

2 rosdep update不能自动更新
解决方法:
2.1 获取rosdep离线包
1
获取rosdep离线文件包:
关注微信公众号:Robot实验室
回复rosdep 下载压缩包
2
找到压缩包所在目录,在该目录打开终端,并输入:
sudo unzip rosdep.zip -d /opt/rosdep
2.2 分别修改init、rep3、sources_list、gbpdistro_support四个文件中的链接
1
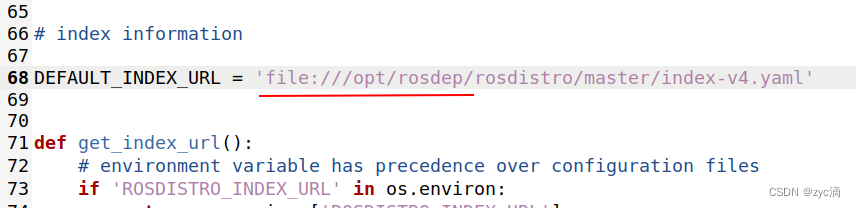
sudo gedit /usr/lib/python3/dist-packages/rosdistro/__init__.py
将68行修改成以下划线内容
2
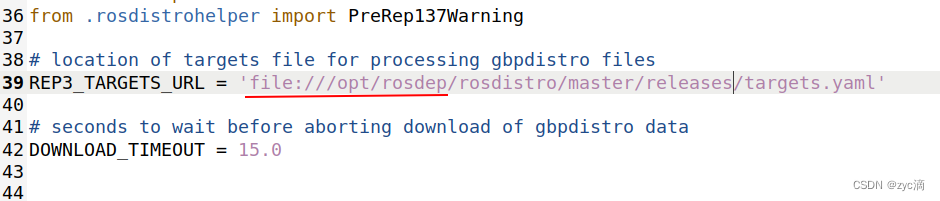
sudo gedit /usr/lib/python3/dist-packages/rosdep2/rep3.py
3
sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py

4
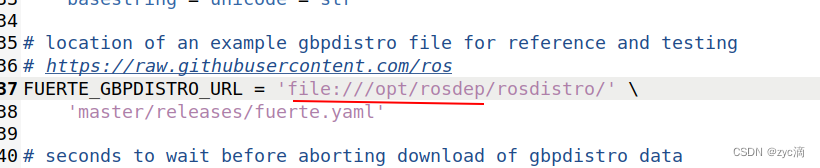
sudo gedit /usr/lib/python3/dist-packages/rosdep2/gbpdistro_support.py
2.3 重新更新rosdep
sudo rosdep init
rosdep update
3 可能出错的情况
以上文件修改好后,还会报错的可能情况:
1 输入rosdep init 报错
这是因为list结尾的文件已经存在,删除这个文件,重新输入即可
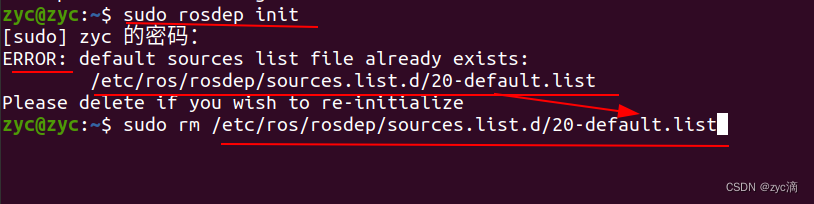
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
2 输入rosdep update报错
重新检查以上四个文件里的内容是否修改正确














 893
893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









