






一、ubantu20.04安装(主要是分区)
之前装了个虚拟机VM的ubantu20.04+ROS,结果空间(只分配了20G)满了。
1.下载ubuntu-20.04.4-desktop-amd64.isoGet Ubuntu | Download | UbuntuDownload Ubuntu desktop, Ubuntu Server, Ubuntu for Raspberry Pi and IoT devices, Ubuntu Core and all the Ubuntu flavours. Ubuntu is an open-source software platform that runs everywhere from the PC to the server and the cloud. https://ubuntu.com/download
https://ubuntu.com/download
2.下载rufus-3.18.exe,插入U盘,并制作启动盘。Rufus - 轻松创建USB启动盘 http://rufus.ie/zh/
http://rufus.ie/zh/
3.分3个区(①②我是直接分了300G出来)
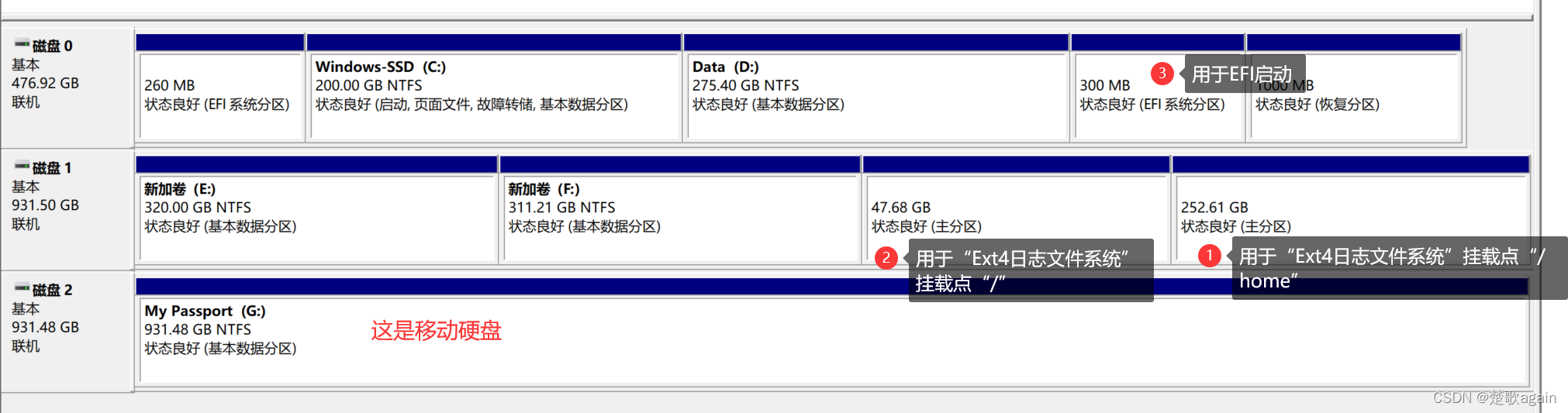
uabntu里可以看出我分300G空闲空间出来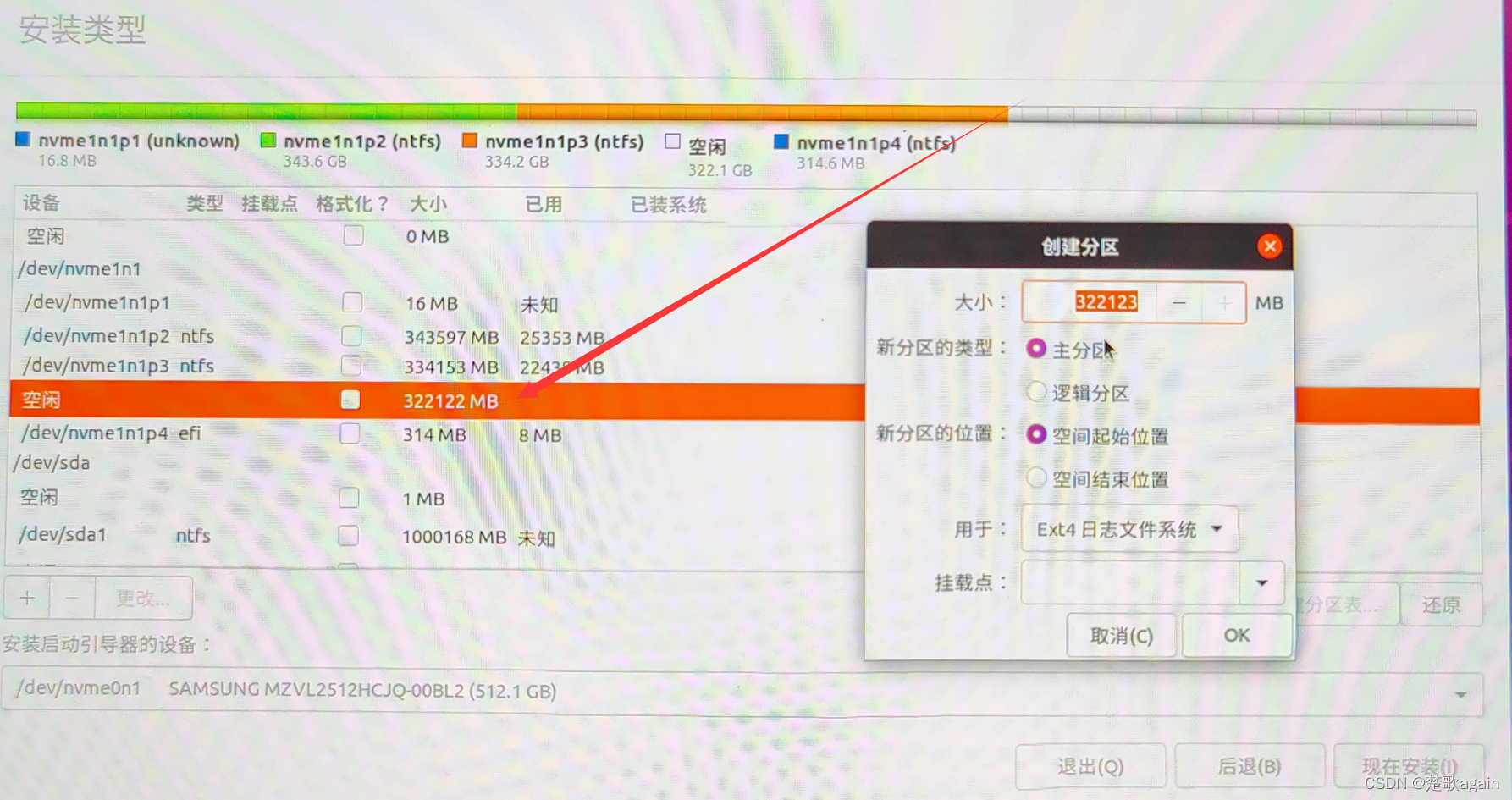
4.启动盘制作好后,按住shift+重启,选择U盘重启,进入ubantu系统安装界面。
5.基本都是下一步
分区时: 把之前300G的空闲空间分为2个
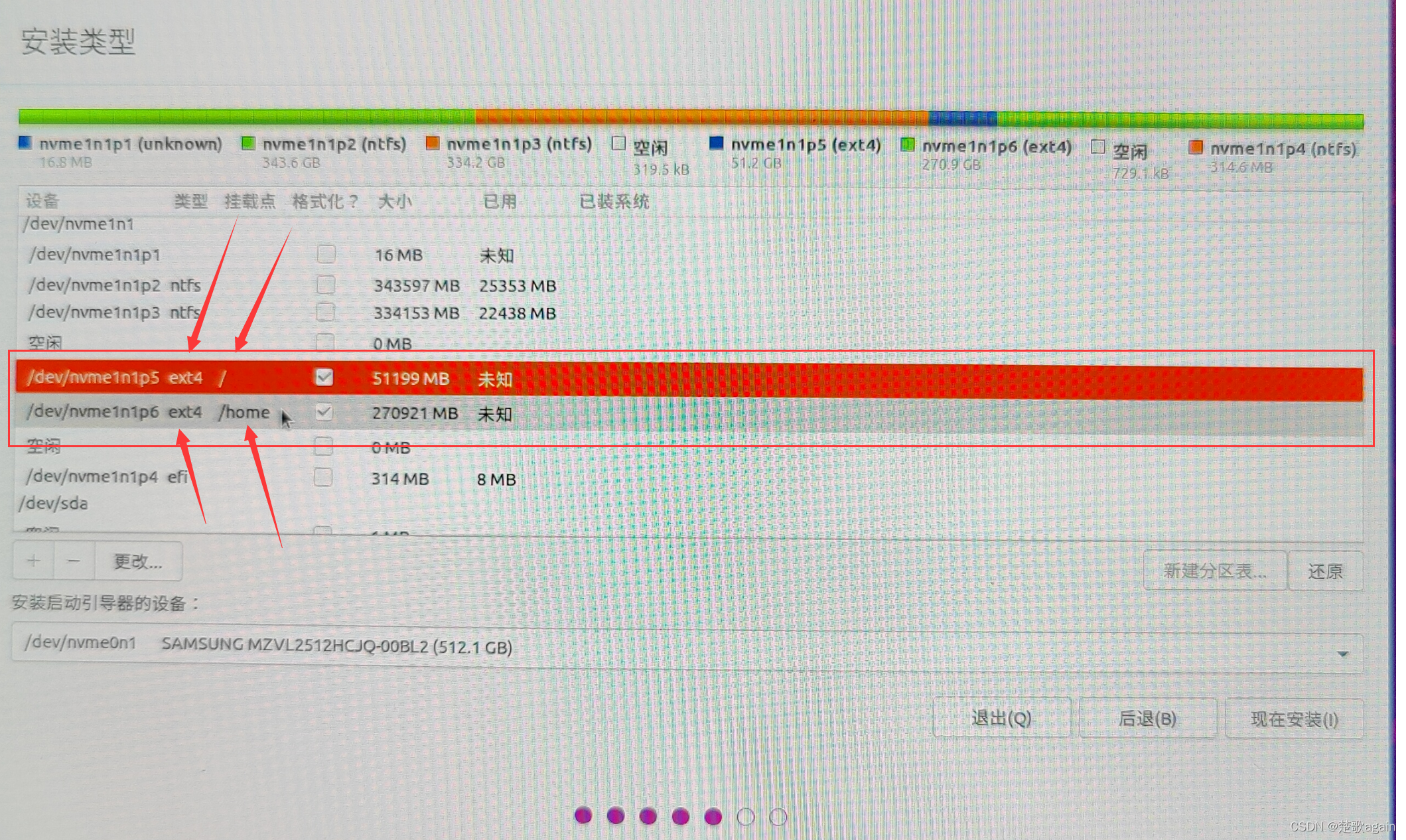
把第三个分区300M设置成EFI启动项

6.我之前只分了2个区(/和/home)没有EFI启动项时出错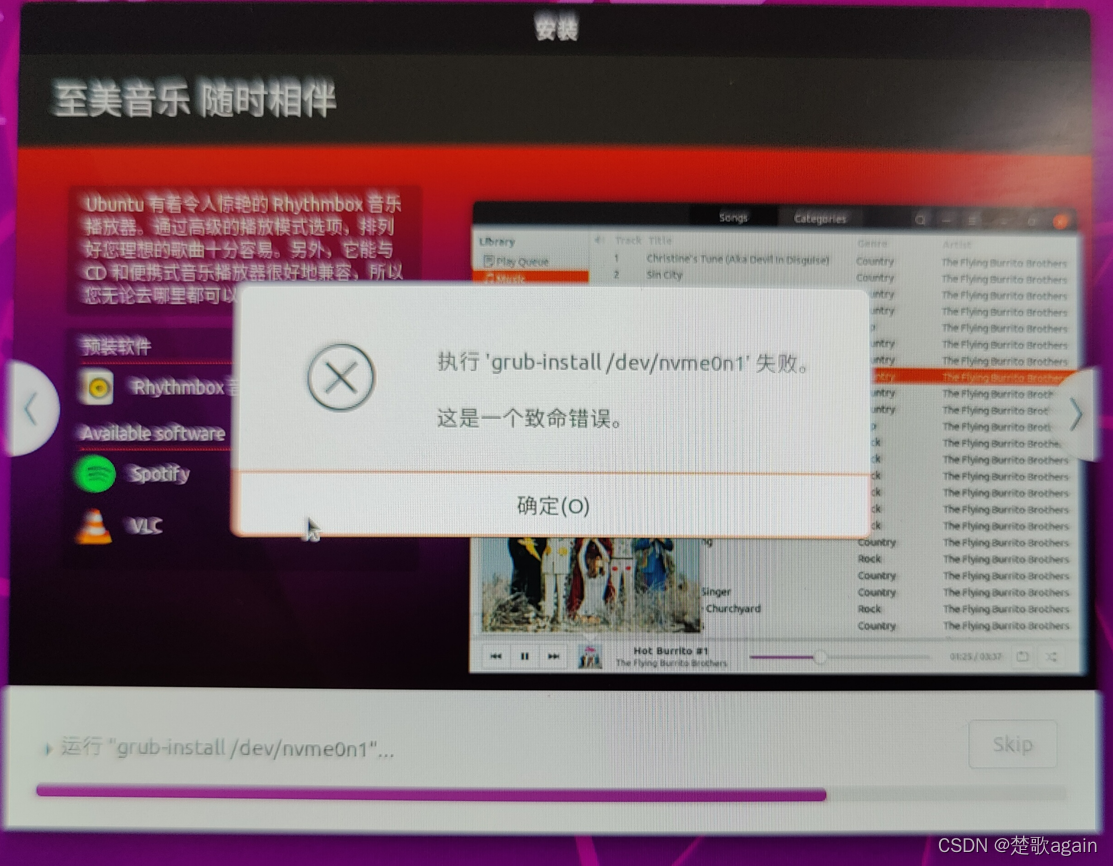
二、ROS安装
在Ubuntu20.04上安装ROS机器人操作系统-Noetic BY叶念西风https://www.bilibili.com/video/BV1Bf4y1a7z1
用到的命令:
sudo gedit /etc/apt/sources.list
sudo apt-get update
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-noetic-desktop-full
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo rosdep init (国内会出错)下载压缩包rosdep.ziphttp://h.xxlab.vip/download/rosdep.zip
sudo unzip rosdep.zip -d /opt/rosdep
sudo gedit /usr/lib/python3/dist-packages/rosdistro/__init__.py ros
sudo gedit /usr/lib/python3/dist-packages/rosdep2/rep3.py
sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py
sudo rosdep init
rosdep updaterosdep.zip备用下载链接:
链接:https://pan.baidu.com/s/1agt9dZ7eUHhcLAQxhe3dyg
提取码:wxt6
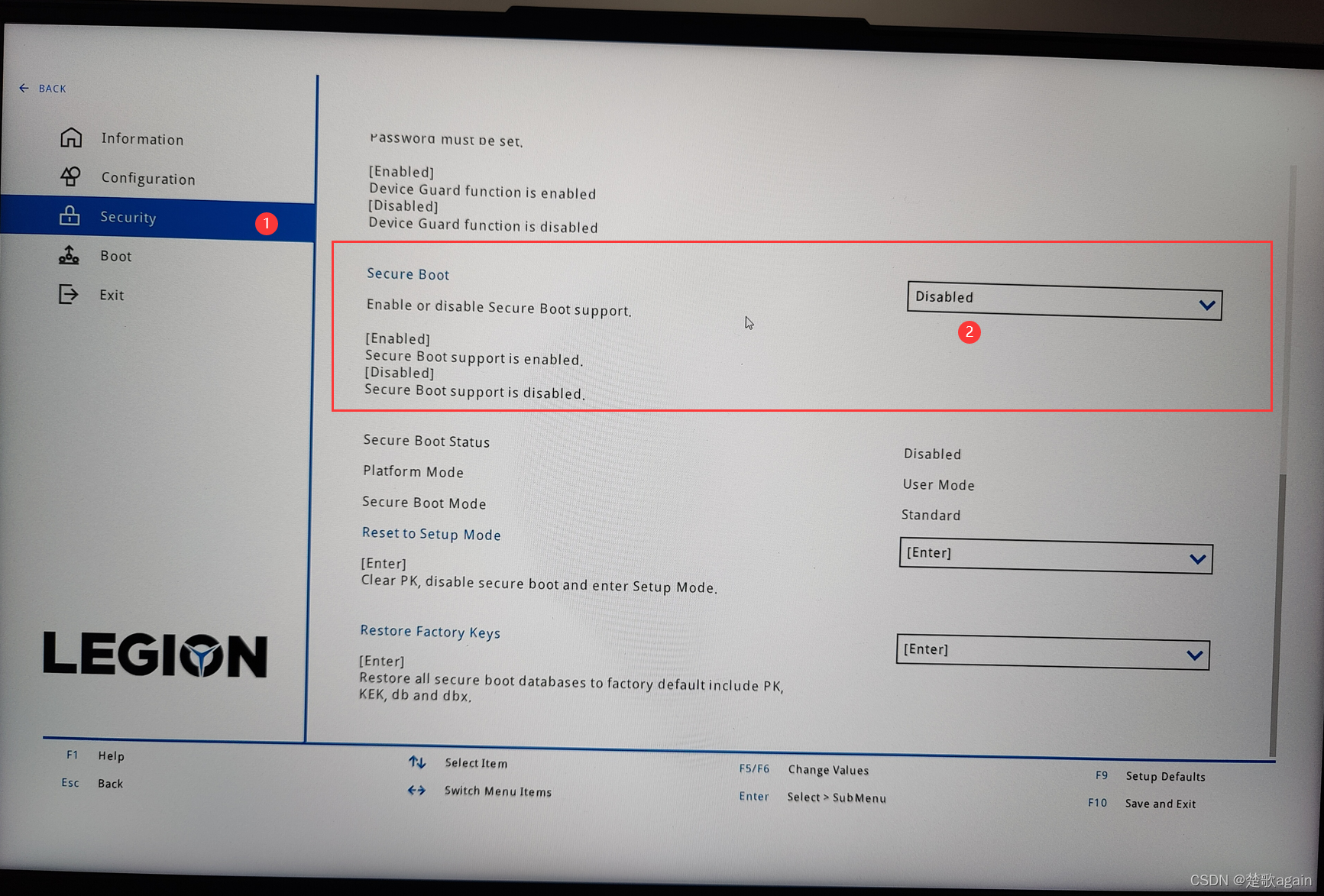
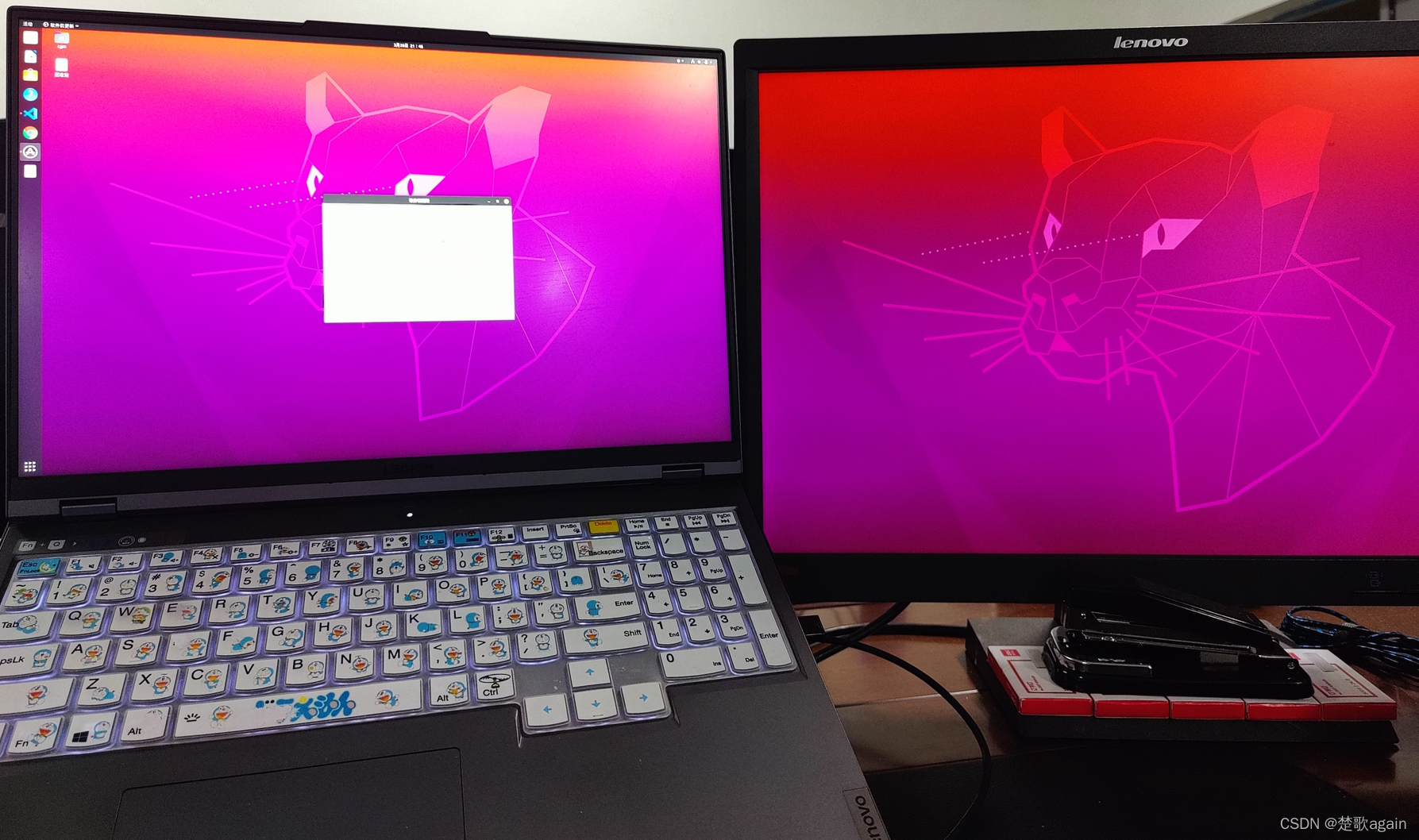
三、联想Y9000P,ubantu20.04无法扩展显示屏幕,扩展的屏幕只能显示鼠标
1.按F2进BIOS关闭secure boot
2.ubantu中打开软件更新用nvidia-470
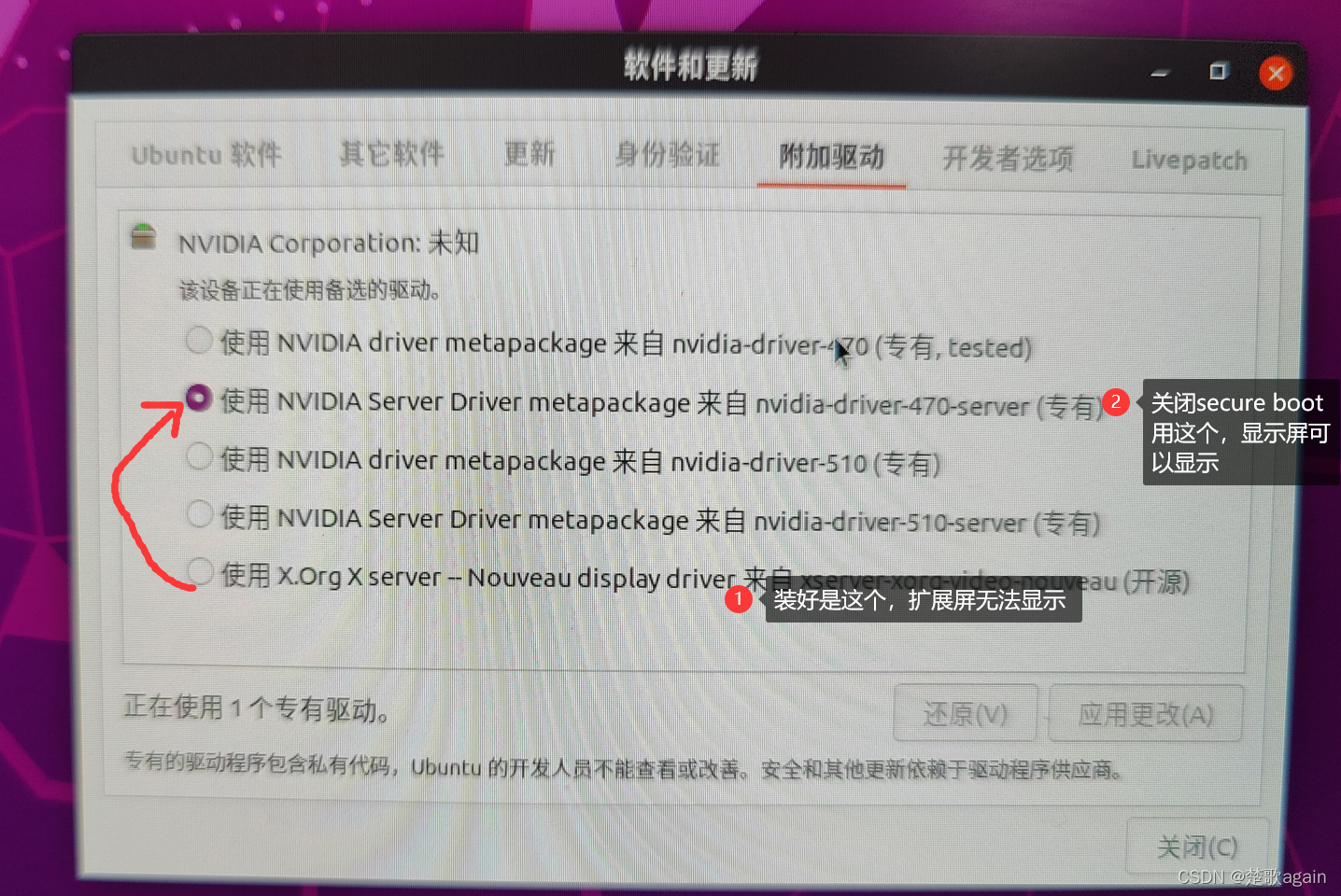
扩展显示


















 1787
1787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











