







1 创建工作空间
创建工作空间:
创建catkin_ws文件夹,在该文件夹下创建src文件(该src文件里用来存放功能包),然后在catkin_ws 目录下,输入catkin_make编译;即:
mkdir catkin_ws # 该名称随意
cd ctakin_ws
mkdir src # 名称固定
catkin_make
添加环境变量:
ctrl+h:打开/关闭隐藏文件
在主目录里,打开.bashrc 文件,在最后一行添加:
source /home/zyc/catkin_ws/devel/setup.bash
注:前面是catkin_ws的绝对路径
2 创建功能包
功能包是在上面的src文件夹下创建的
规范:
catkin_create_pkg 功能包名 【依赖】
如:
#注意:该指令是在src目录下的终端输入的
catkin_create_pkg practice_pkg roscpp rospy std_msgs
也可以在vscode里直接创建,即:
在src文件夹上右击,创建功能包即可
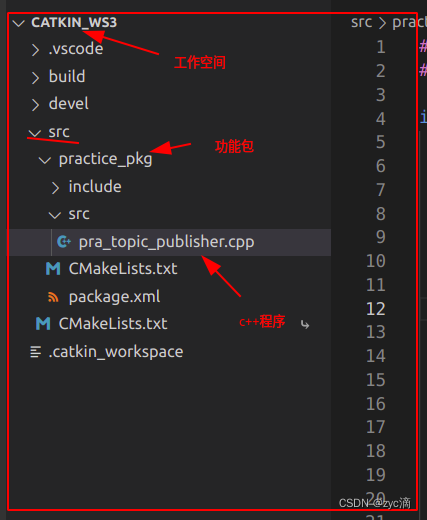
至此,工作空间和功能包创建完成。
完整示意图:














 2283
2283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









