







大家好,我是虎哥,从今天开始,我将花一段时间,开始将自己从ROS1切换到ROS2,在上几篇中,我们一起了解ROS 2中很多基础概念,从今天开始我们逐步就开始利用ROS2的特性进行开发编程了。
工作区(workspace)是包含ROS 2包的目录。在使用ROS 2之前,有必要在你计划使用的终端中source ROS 2安装工作空间。这使ROS 2的软件包可在该终端中使用。你还可以选择采购“覆盖”——一个辅助工作区,在那里你可以添加新的包,而不会干扰你已经source的现有ROS 2工作区”。
1.1 Source ROS 2 environment
source /opt/ros/eloquent/setup.bash1.2 创建工作目录
最佳习惯是为每个新工作区创建一个新目录。名称不重要,但让它指示工作区的用途是有帮助的。让我们为“开发工作区”选择目录名dev_ws:
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src另一个最佳习惯是将工作区中的任何包放入src目录。上面的代码在dev_ws中创建一个src目录,然后CD到它。
1.3 clone 一个简单的测试工程
在clone之前,请确保您仍在dev_ws/src目录中。在的之后部分中,你将创建自己的包,但目前你将使用现有包练习如何将工作区放在一起。我们使用的现有软件包来自ros_tutorials存储库(repo)。如果您阅读了“初学者:CLI工具”教程,您将熟悉本回购中的一个软件包turtlesim。
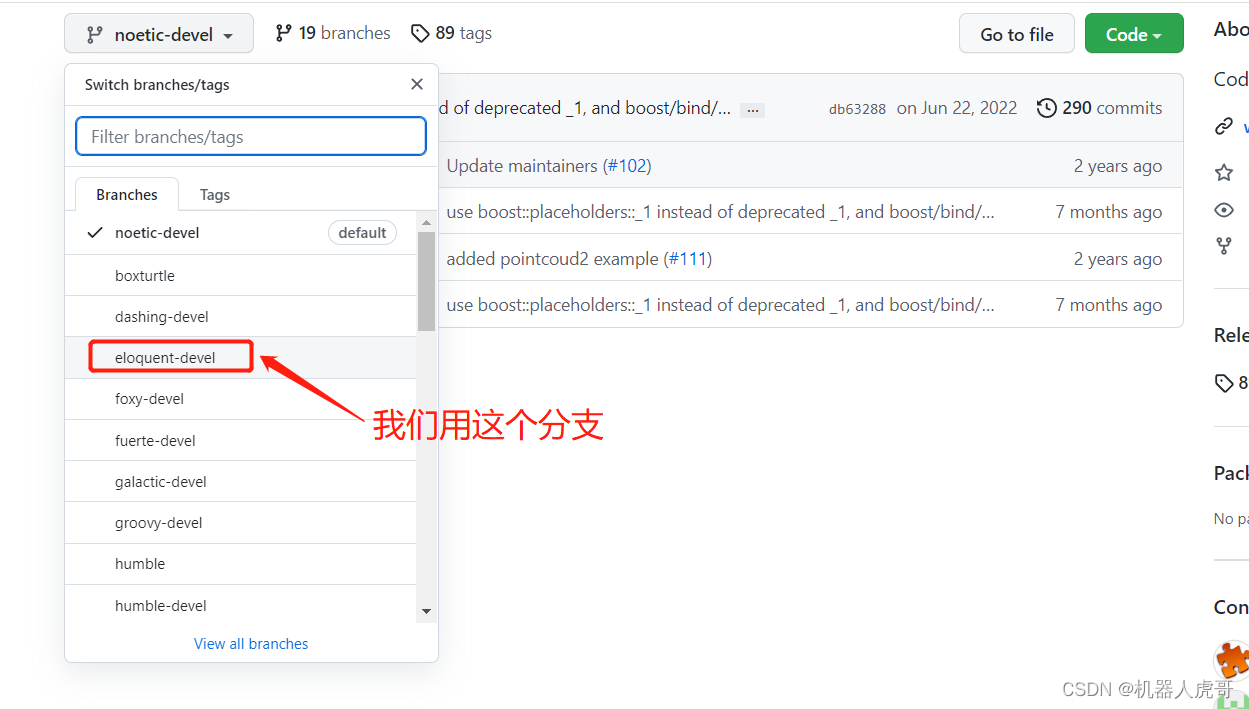
入口:GitHub - ros/ros_tutorials: Code used in tutorials found on ROS wiki

请注意目录列表上方左侧的“分支”下拉列表。克隆此repo时,添加-b参数,后跟与ROS2发行版对应的分支。
 在dev_ws/src目录中,为正在使用的发行版运行以下命令:
在dev_ws/src目录中,为正在使用的发行版运行以下命令:
git clone https://github.com/ros/ros_tutorials.git -b eloquent-devel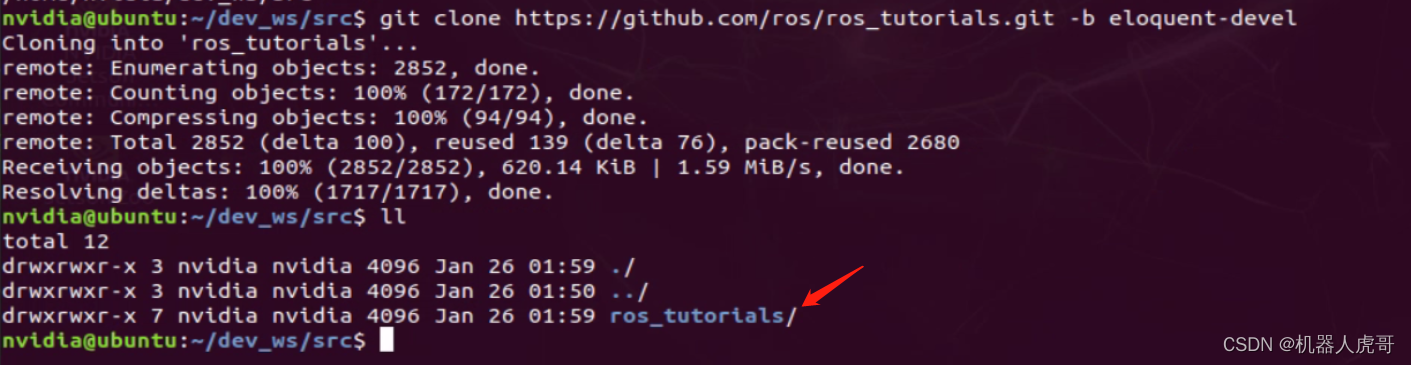
我们可以进入这个包的目录,看到所有下载的子包
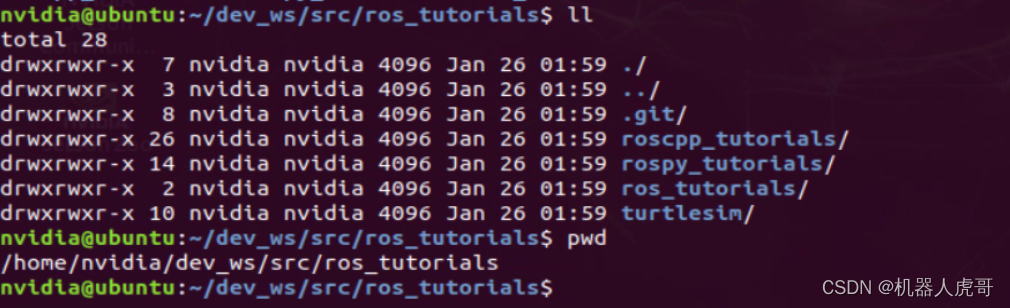
前三个包被忽略;turtlesim是本回购协议中唯一实际的ROS 2包。现在,你已经用一个示例包填充了工作空间,但它还不是一个功能齐全的工作空间。需要首先解决依赖关系并构建工作区。
1.4 解决依赖关系(Resolve dependencies)
在构建工作区之前,您需要解决包依赖关系。可能已经拥有所有依赖项,如果不希望构建在长时间等待后因为缺少依赖项而失败,最好做法是在每次检查依赖项。
从工作区的根目录(dev_ws)运行以下命令:
cd ~/dev_ws
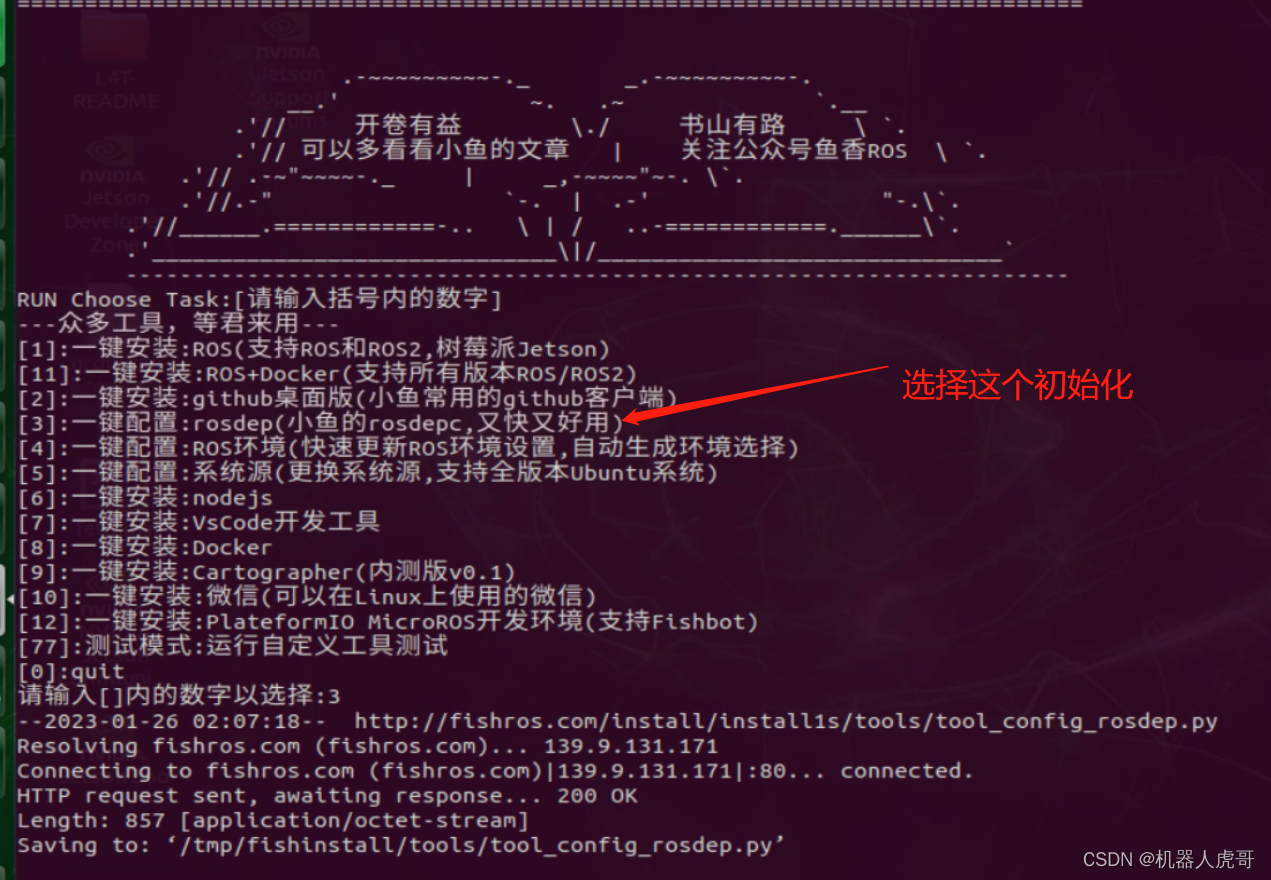
rosdep install -i --from-path src --rosdistro eloquent -y如果出现如下错误提示:

继续使用之前安装的时候提示使用的小鱼一键安装。

完成后继续之前的建立依赖的命令,就可以成功了。

如果您已经拥有所有依赖项,控制台将返回:
#All required rosdeps installed successfully包在package.xml文件中声明其依赖关系。上面命令遍历这些声明并安装缺少的声明。后续可以在另一个教程中了解更多有关rosdep的信息。
1.5 使用colcon 编译工程
从工作区的根目录(dev_ws),现在可以使用以下命令构建包:
#进入根目录
cd ~/dev_ws
#编译
colcon build编译过程中会有提示,因为之前我们安装过这个工程,现在编译,会有提示注意,这也是和之前ROS1有区别的地方,ROS2中可以使用覆盖的概念。

1、colcon build还可以带一些参数,这个做个分享:
-
--packages-up-to只编译指定包,其所有依赖项,但不构建整个工作区(节省时间) -
--symlink-install避免每次调整python脚本时都需要重新构建 -
--event-handlers console_direct+显示生成时的控制台输出(否则可以在“log”目录中找到)
构建完成后,在工作区根目录(~/dev_ws)中输入ls,您将看到colcon已经创建了新目录:

install 目录是工作区的安装文件所在的目录,您可以使用它来源代码覆盖。这个和ROS1中有很大区别。
1.6 Source 环境变量覆盖(the overlay)
注意:在Source 之前,打开一个新的终端,与构建工作区的终端分开,这一点非常重要。在构建的同一终端中Source 覆盖层,或者同样在Source 覆盖层的地方构建覆盖层,可能会产生复杂的问题。
在新终端中,将您的主ROS 2环境作为“底层”,以便可以在其上构建覆盖层:
#新终端,不是构建终端 设置环境变量
source /opt/ros/eloquent/setup.bash
#进入工作根目录
cd ~/dev_ws
#执行覆盖
. install/local_setup.bash执行local_setup只会将系统中可用的包添加到您的环境中。local_setup提供了允许使用这两个工作空间。因此,像刚才所做的那样,获取主ROS 2安装的设置,然后获取dev_ws覆盖的local_setup,与获取dev_w的设置是一样的,因为这包括创建它的底层环境。如果有很多个,交叉覆盖,就可能会出现一些问题。
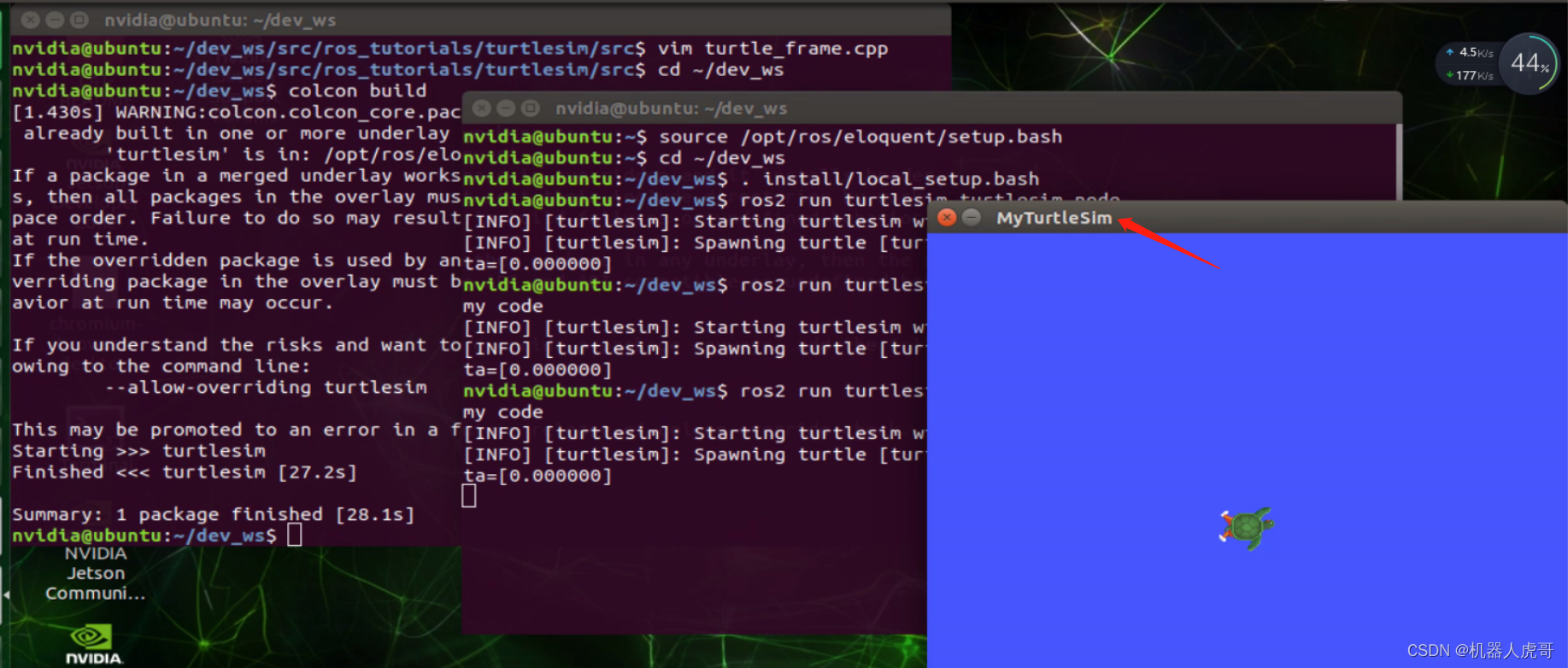
现在,你可以在这个终端中运行你刚才编译的包了:
ros2 run turtlesim turtlesim_node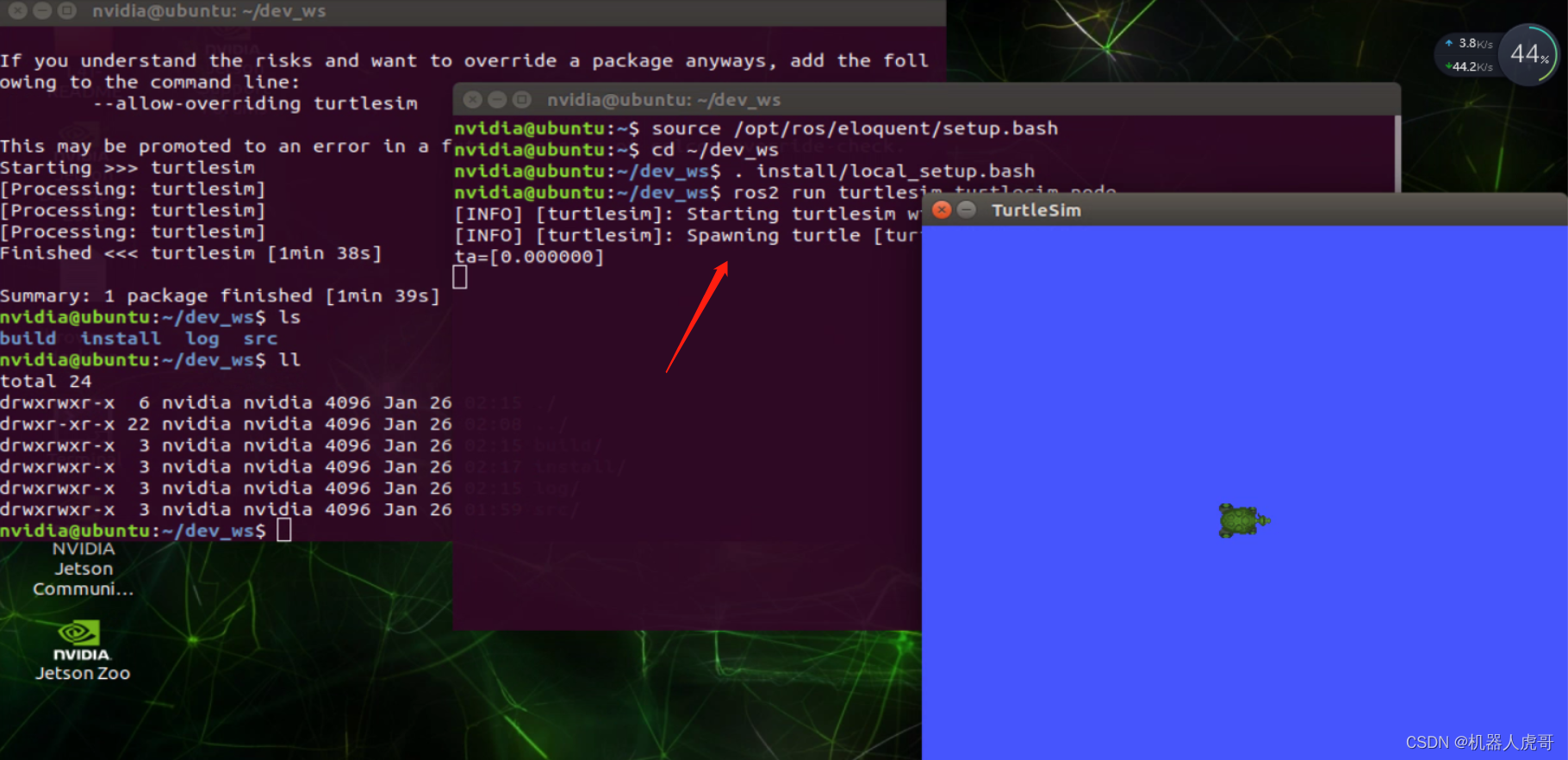
但是,你怎么能知道这是正在运行的包,而不是系统自带的那个包呢?
你可以修改叠自己包中的turtlesim,以便可以看到效果:
可以看到本地的优先于系统的。
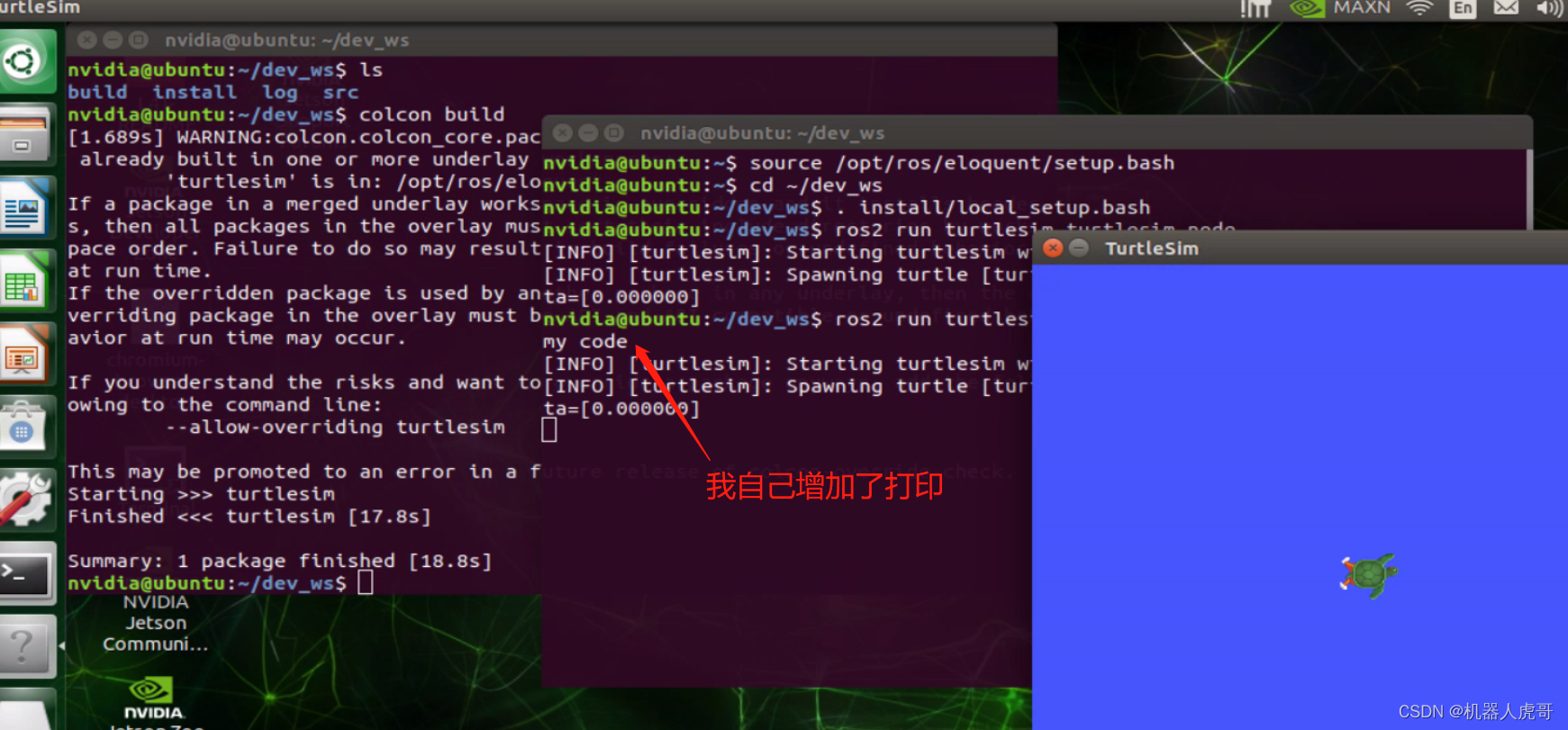
我是在启动文件最开始增加了一句打印:
cd ~/dev_ws/src/ros_tutorials/turtlesim/src
vim turtlesim.cpp
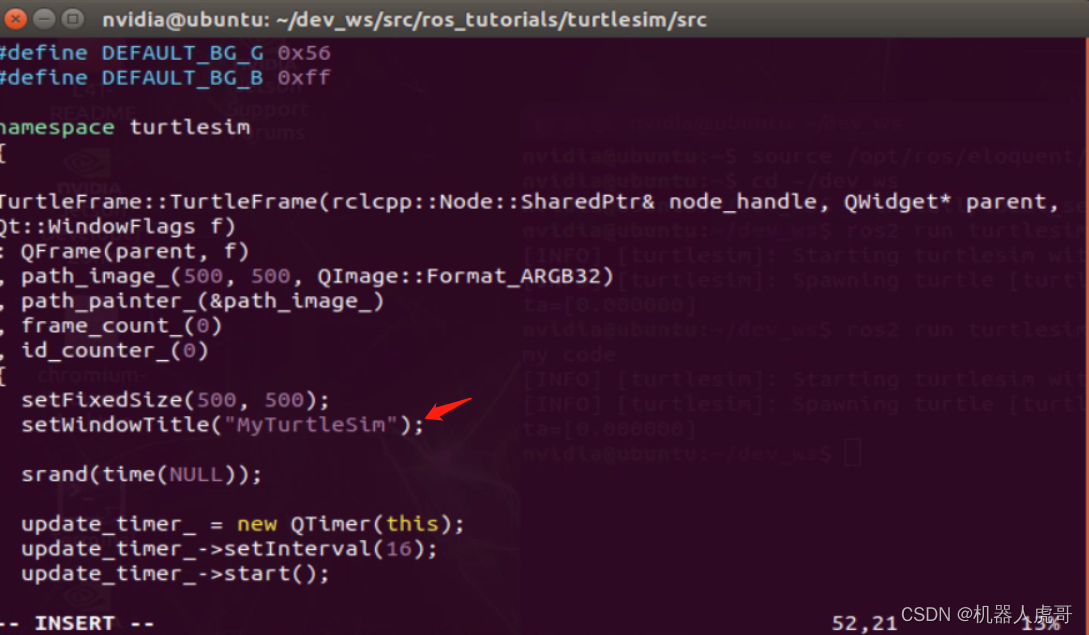
1.7 官方提供的修改窗口标题的方法验证
上面为了验证,谁的优先,我自己增加了打印,官方提供的事修改窗口名称的方法,我就一并也分享给大家:
cd ~/dev_ws/src/ros_tutorials/turtlesim/src
vim turtle_frame.cpp
 重新编译:
重新编译:
#进入根目录
cd ~/dev_ws
#编译
colcon build完事后,继续再新的终端测试:
我们用新的一个终端,运行系统自带的做对比:
以上就是我今天要分享的内容。纠错,疑问,交流: 911946883@qq.com

















 2457
2457

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











