







- 安装键盘控制包;
sudo apt-get install ros-kinetic-teleop-twist-keyboard
- 仿真模拟
cd catkin_ws
source ./devel/setup.bash
roslaucnh summit_xl_sim_bringup summit_xl_complete.launch- 启动键盘控制节点
%------正常键盘控制节点,是直接订阅/cmd_vel------
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
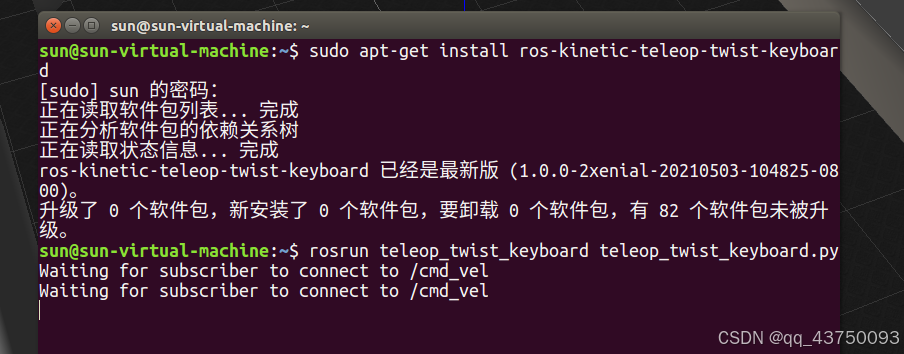
- 订阅不到/cmd_vel,因为,没有这个节点,运行rostopic list可以看到是/robot/cmd_vel;对节点进行重映射。重映射参数 - ROS Wiki
rostopic list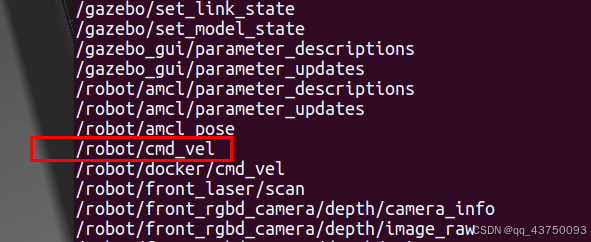
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/robot/cmd_vel
%-------将订阅的节点由/cmd_vel转换为/robot/cmd_vel------ 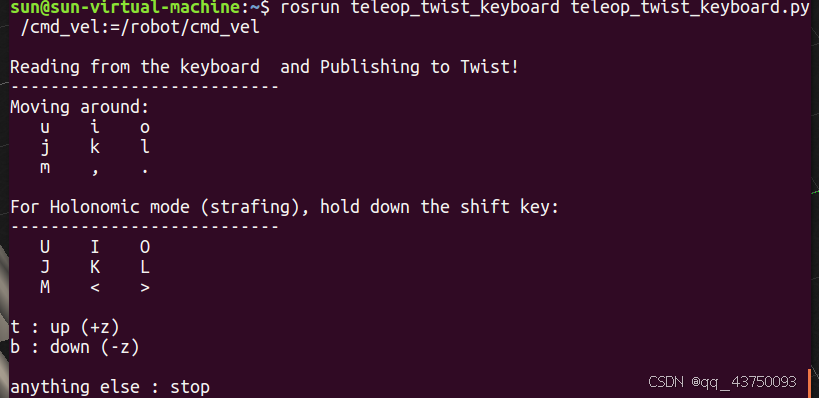


















 2122
2122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









