







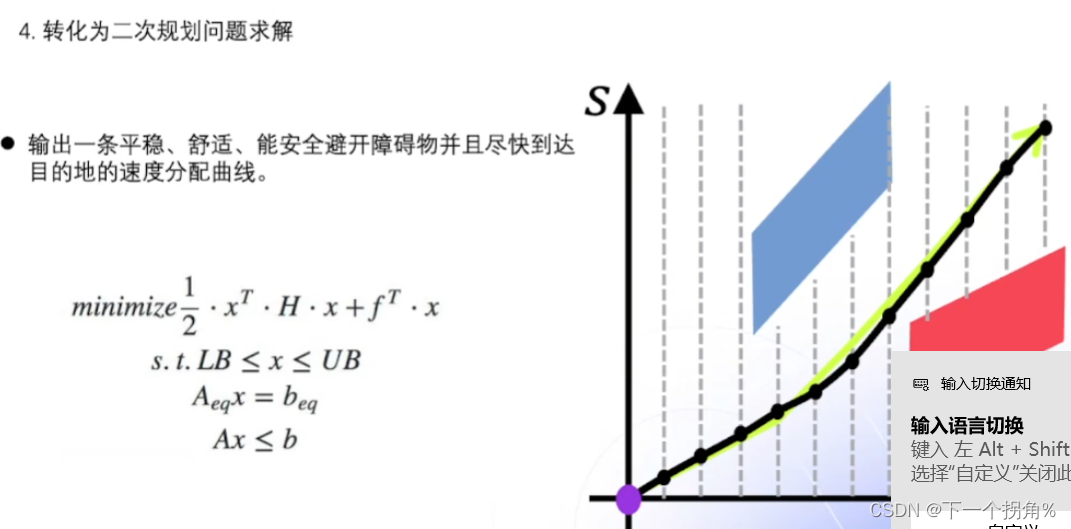
 文章详细介绍了Apollo自动驾驶系统中的速度规划算法,包括ST图的概念,动态规划用于确定超车或让行的决策,以及速度边界的优化过程。非线性速度优化考虑了路径曲率的影响,而二次规划则处理速度曲线的平滑问题,确保舒适性和约束满足。
文章详细介绍了Apollo自动驾驶系统中的速度规划算法,包括ST图的概念,动态规划用于确定超车或让行的决策,以及速度边界的优化过程。非线性速度优化考虑了路径曲率的影响,而二次规划则处理速度曲线的平滑问题,确保舒适性和约束满足。
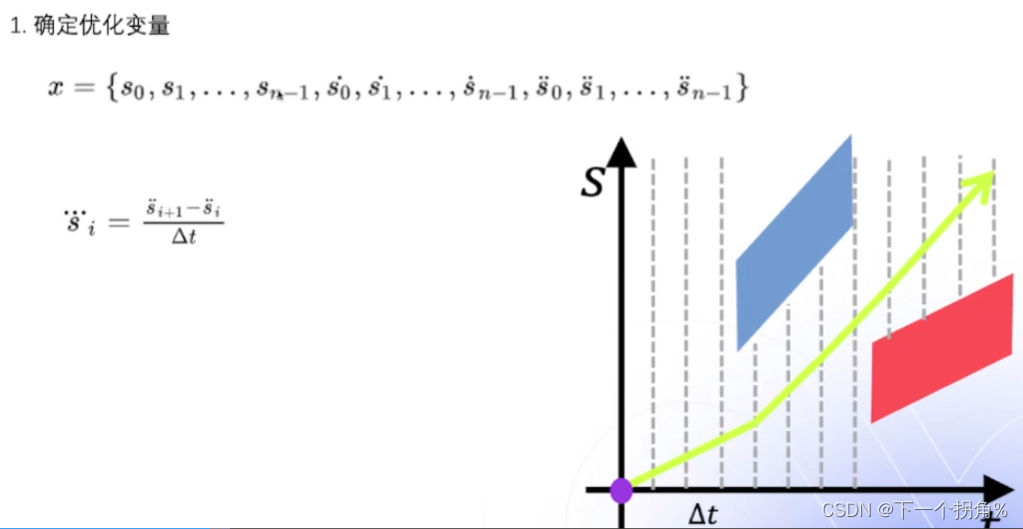
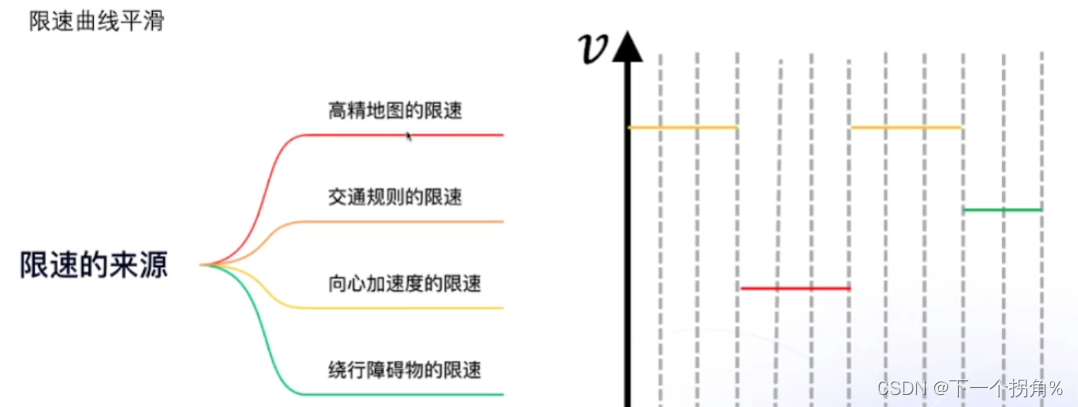
速度规划的ST,和路径规划的SL 的S不是一个概念::
速度规划是沿着路径规划的位移,路径规划是沿着参考线的位移。
ST图的斜率是车辆速度。
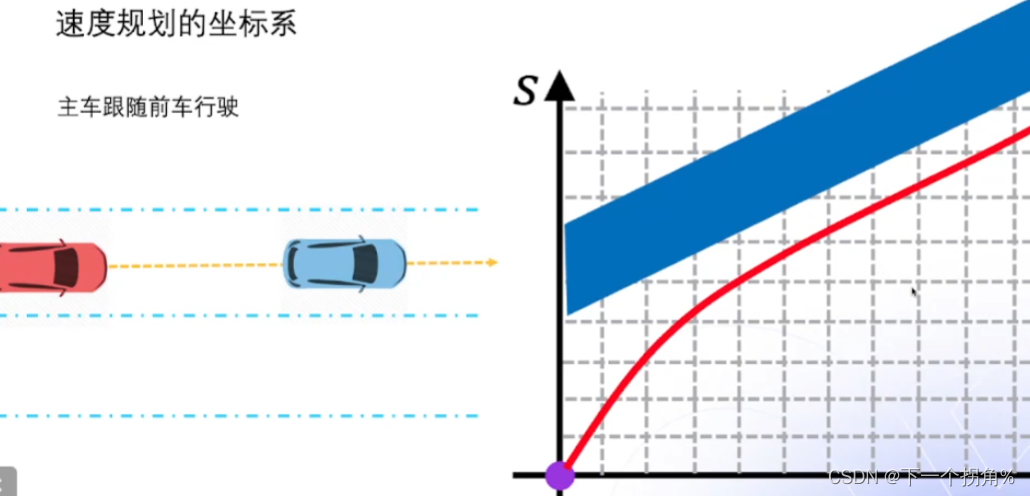
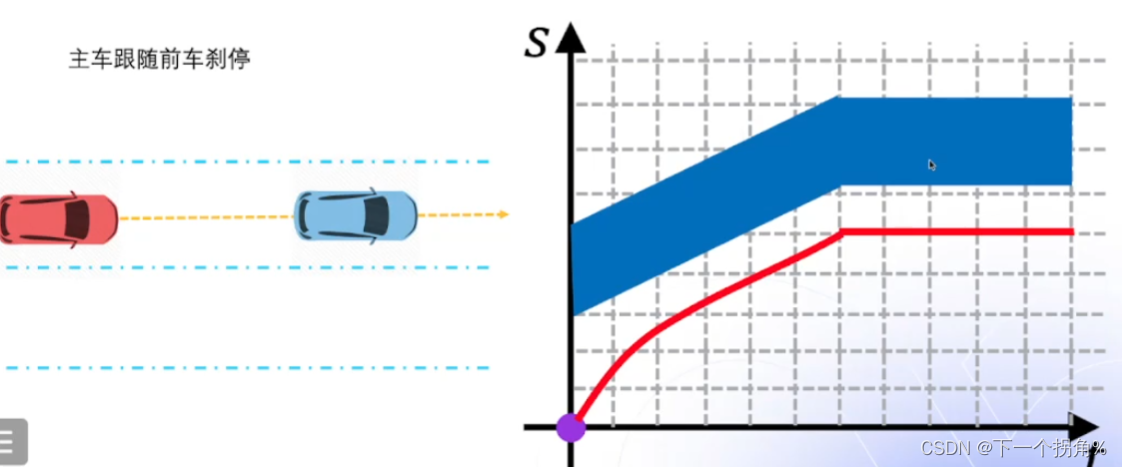
蓝色区域是前车的占据主车路径的行驶区域,宽度是前方车辆占据主车路径的长度(车长),区域斜率是前车速度。
Apollo速度规划算法整体流程::
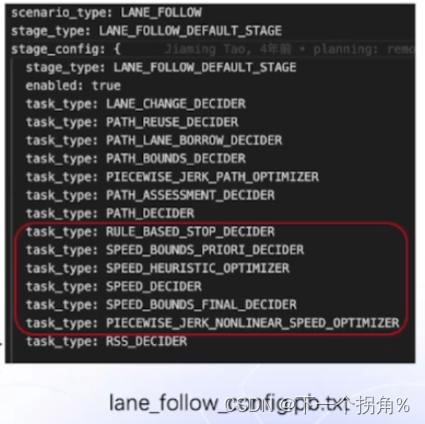
task::
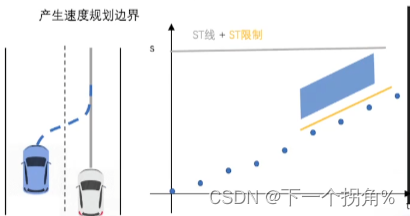
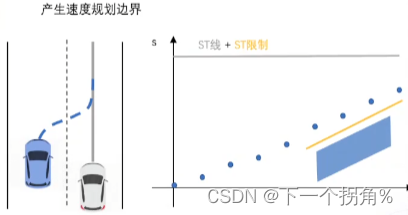
(1) 速度边界确定
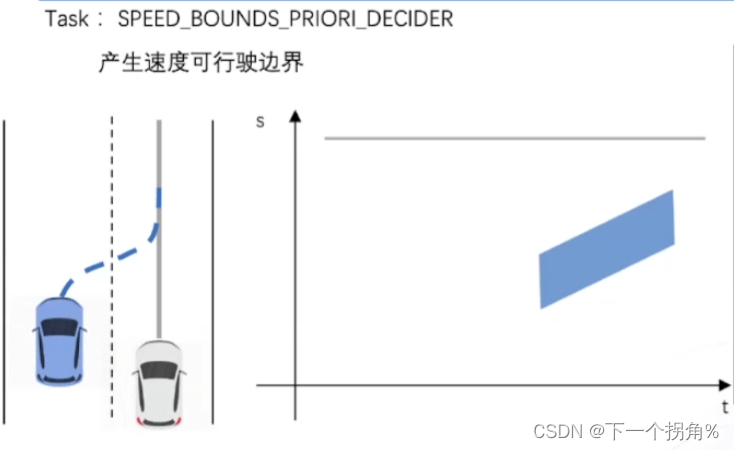
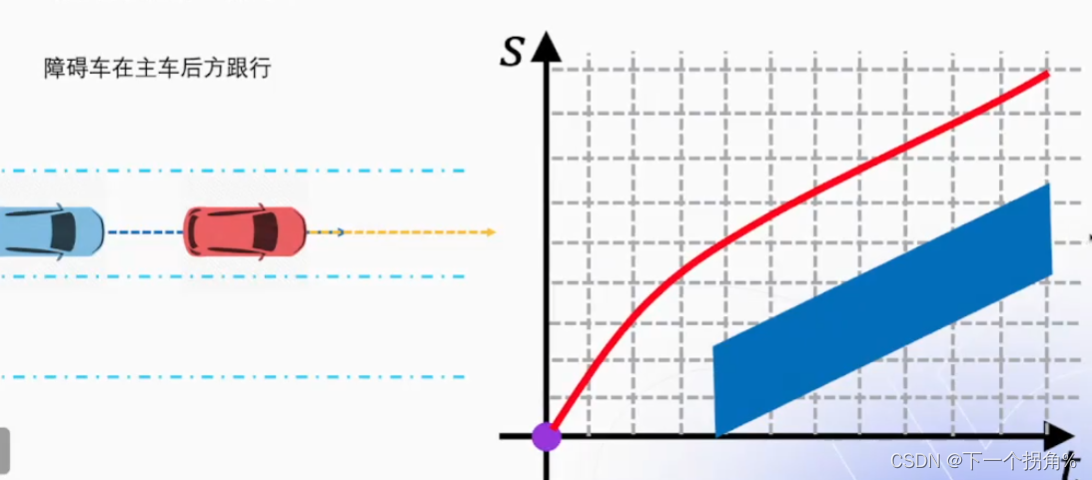
为速度规划、运动规划确定ST曲线的边界,蓝色车辆插入主车车道,障碍物出现的区域t,就是出现在主车路径上的时间,S就是障碍车切入主车路径时的位置,
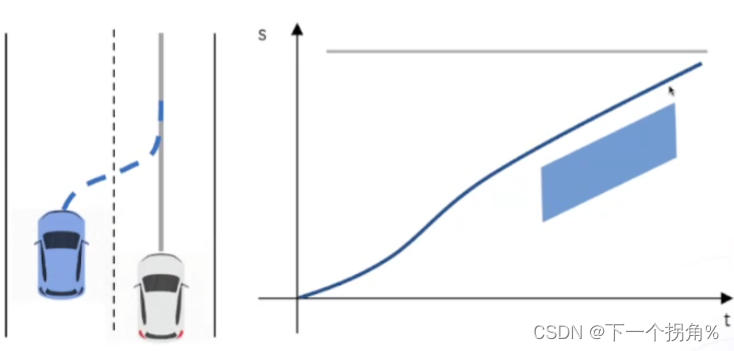
可以加速超过,生成一条区域上面的曲线,
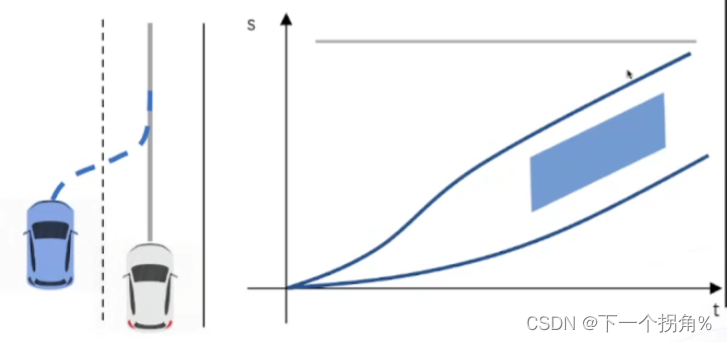
或者减速让行,生成一条阴影区域下方的曲线。
所以上面产生一个非凸空间,不连续空间,不能采用二次规划,先用动态规划对路径进行一个搜索,确定是让行还是超车(这个怎么确定的?),动态规划会迭代求解一条满足约束的,没有碰撞的路径
(2)速度大致优化
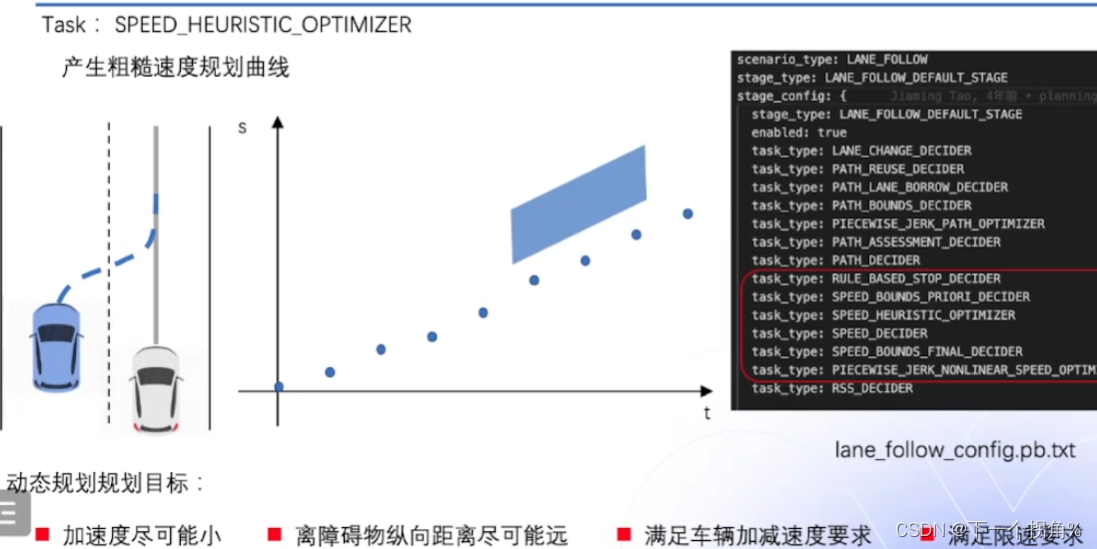
动态规划的点会比较稀疏
(3)速度决策
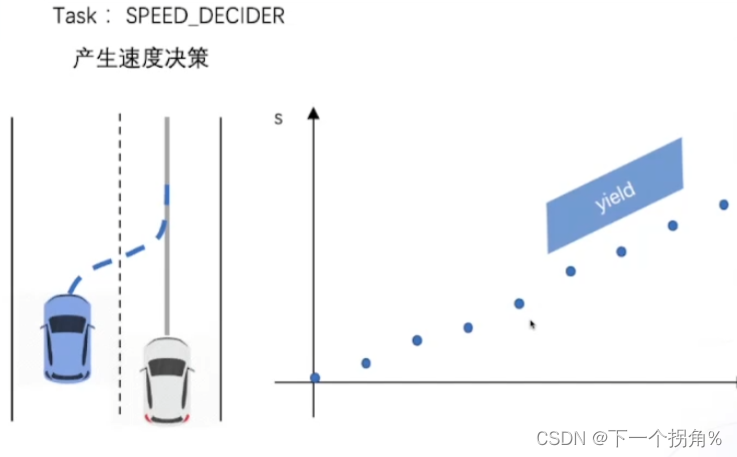
根据粗规划的速度曲线,在障碍物上方还是下方,确定对障碍物超车还是绕行的决策。
(4)速度边界最终决策
(5)速度优化
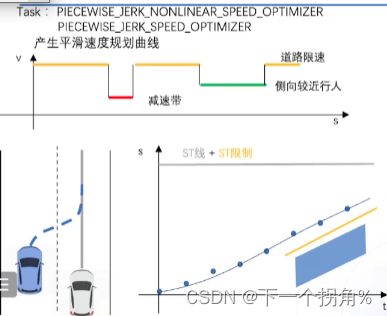
上面是非线性速度优化器,主要考虑路径曲率对速度的影响,曲率约束时非线性约束函数。下面是线性速度优化器。配置文件中二选一即可。
(6)合并速度曲线与路径曲线
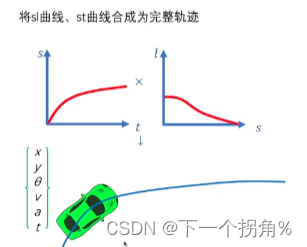
作为最后的 输出
基于动态规划的速度规划
动态规划::
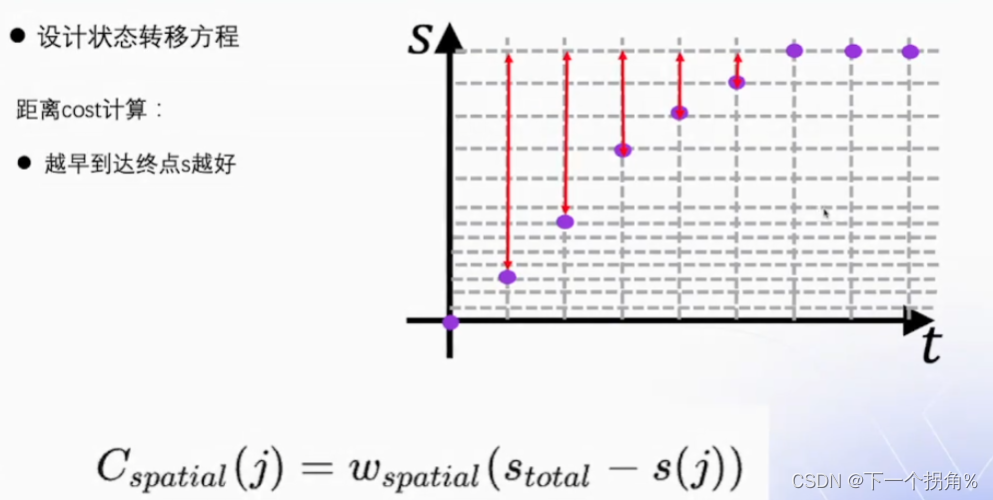
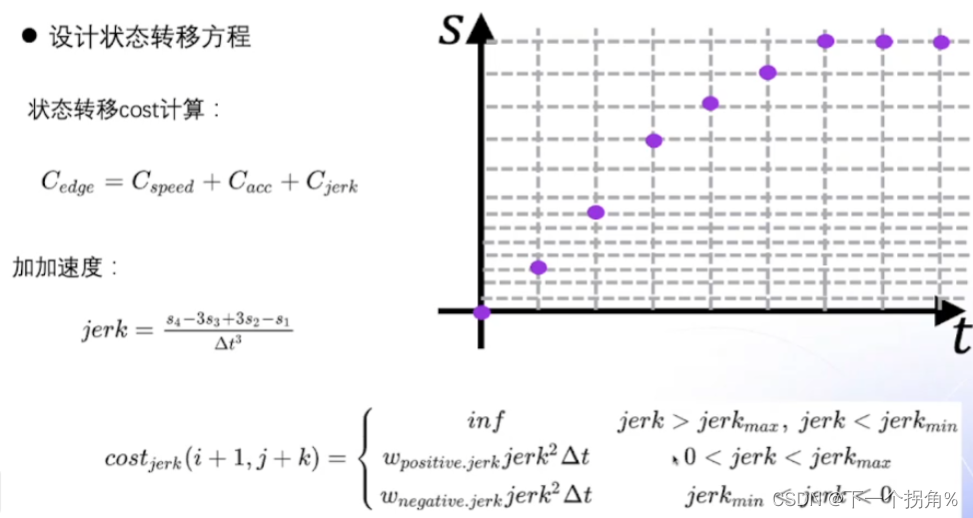
状态转移方程
把原问题分解为子问题,根据子问题的解求解出原问题的解。
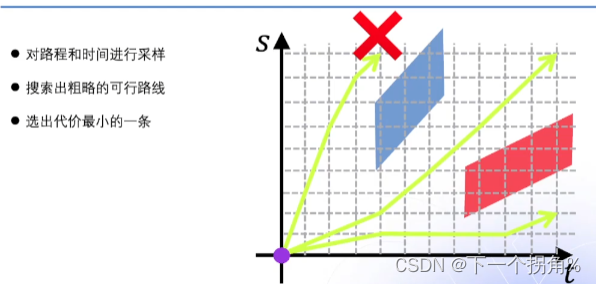
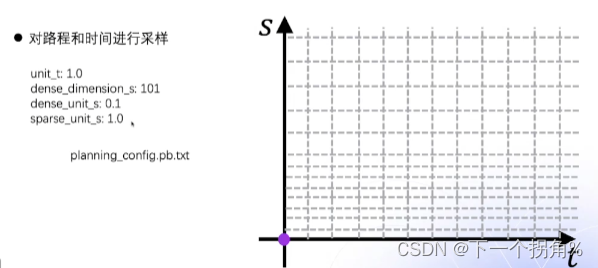
(1)采样
时间t均匀采样,路径s采用先密后疏采样,提高搜索速度
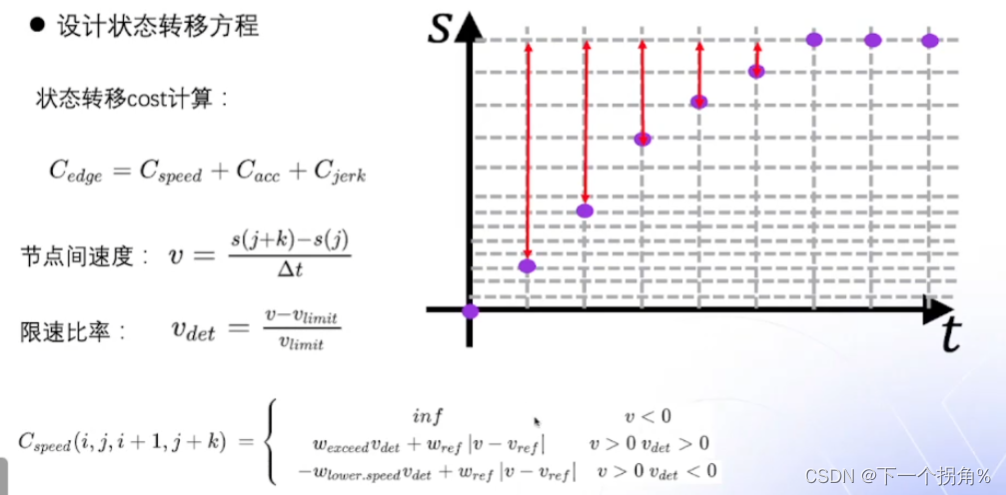
(2)状态转移方程
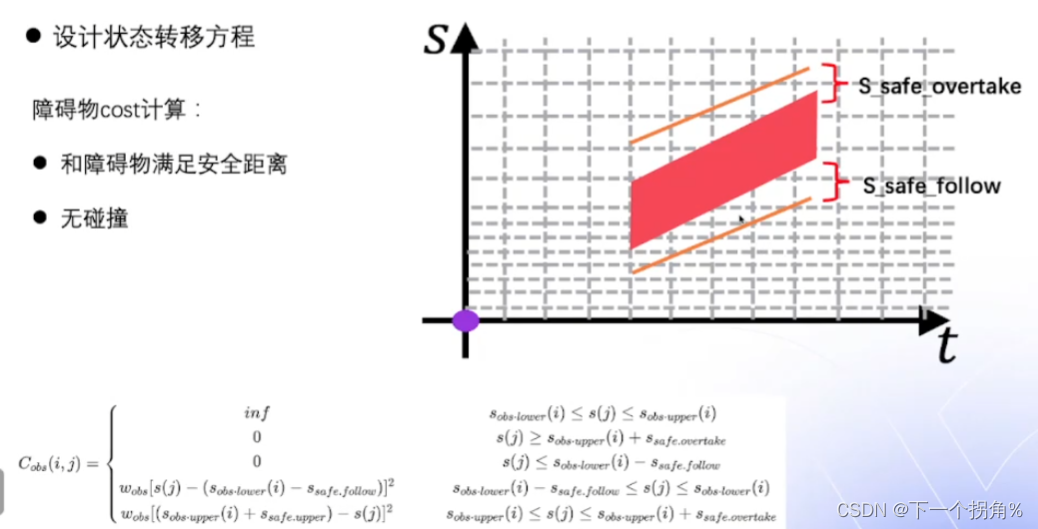
上述是节点的代价
下面是节点之间转移的代价::速度,加速度,加加速度
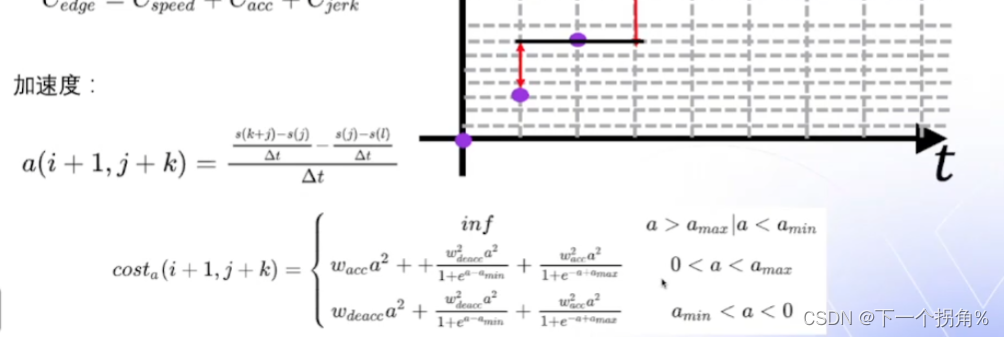
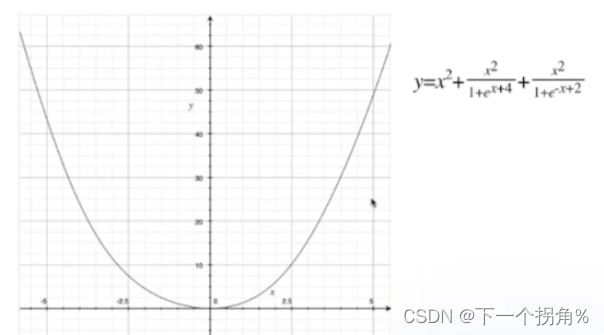
加速度函数的图像如上。期望一个较小的角速度和角加速度,保证舒适性。
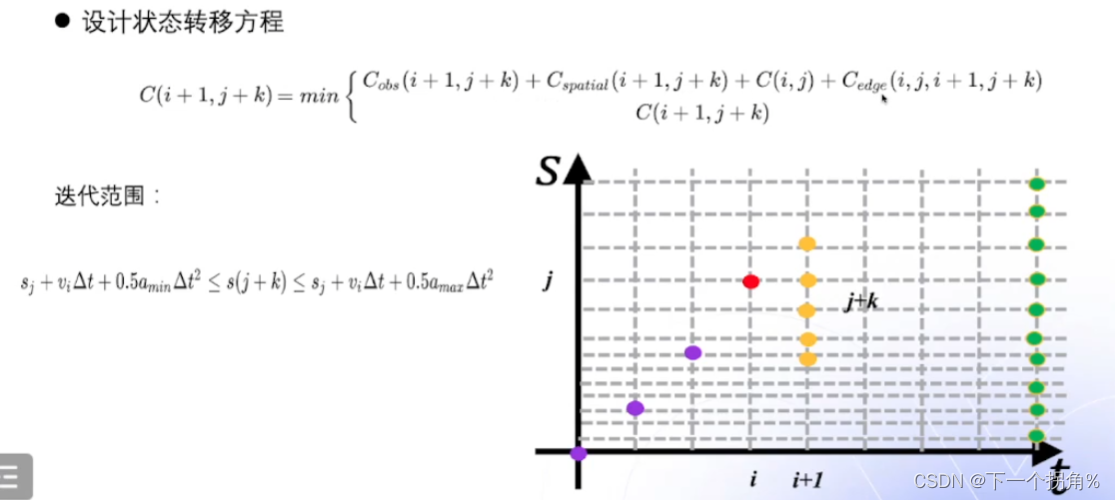
总的状态转移方程如上:障碍物、距离、边界的代价,迭代求最小
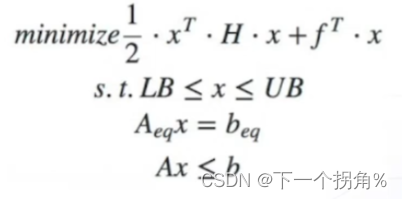
基于二次规划的速度规划
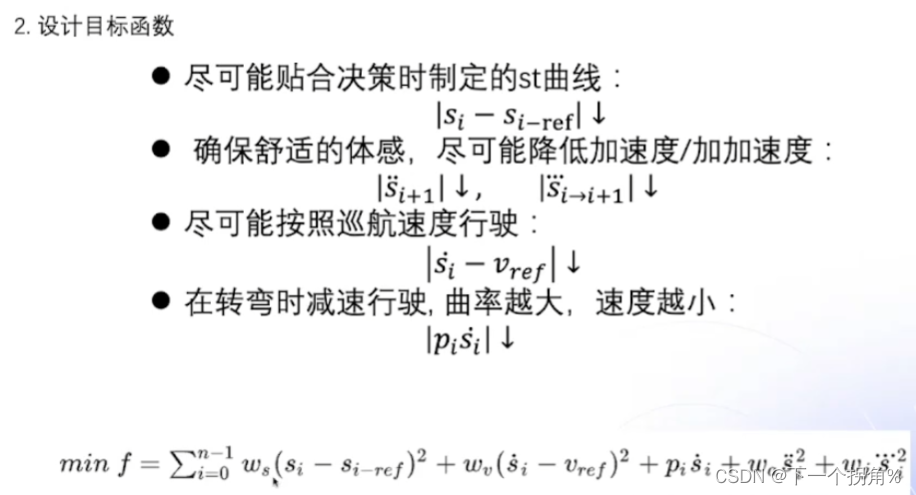
ws是位置权重??,wv是参考速度的权重,pi是根据参考位置制定的一个速度分配,确定一个i时刻速度曲率的权重

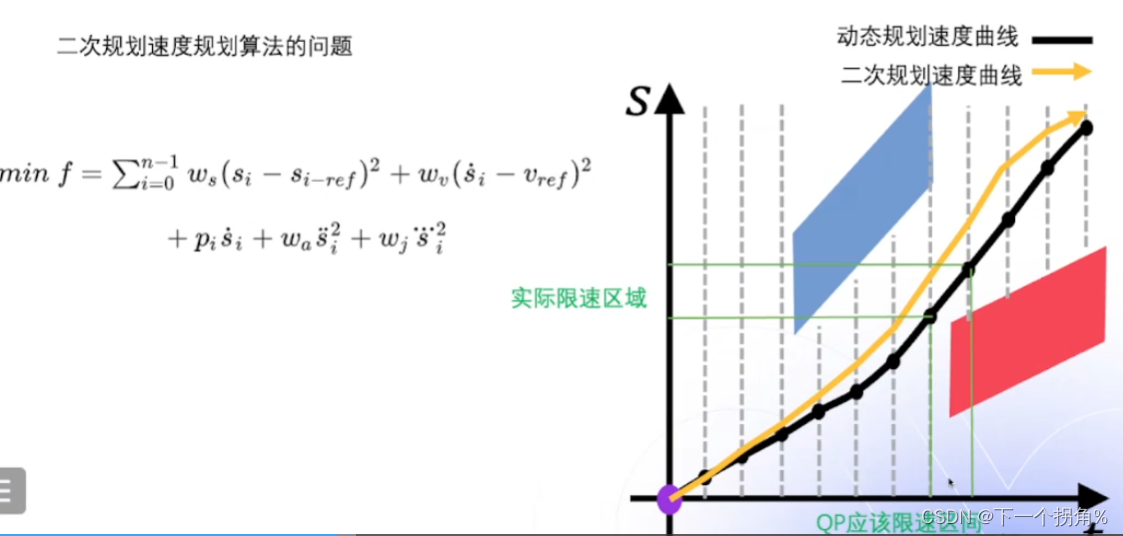
上述二次规划的问题:曲率权重pi是一个时间的函数,实际曲率是一个s的函数,即将s的约束转化成了时间约束,如下图,就会曲率约束不精确的问题。
非线性规划的速度规划
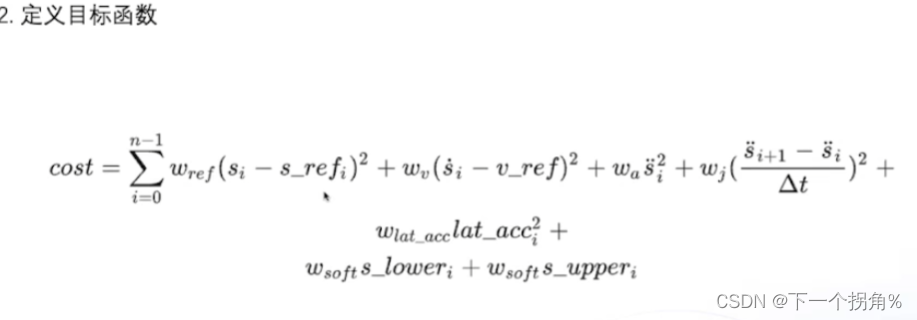
增加了横向加速度和峰值变量约束
要求曲率二次可导
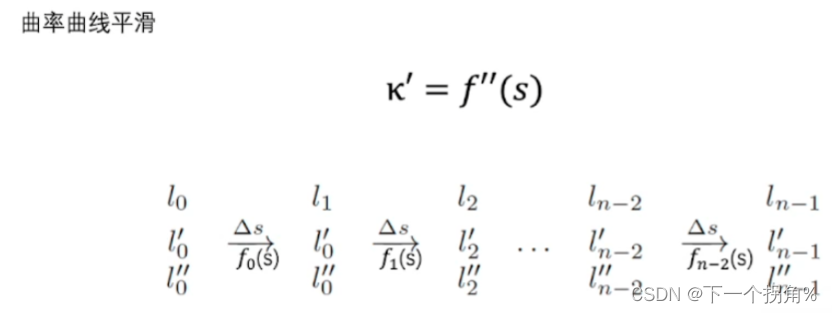
曲率曲线平滑用的二次规划::
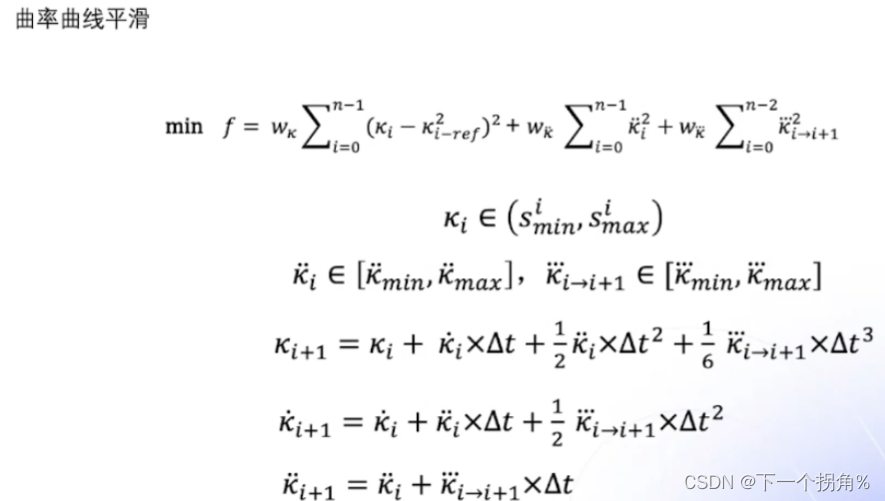

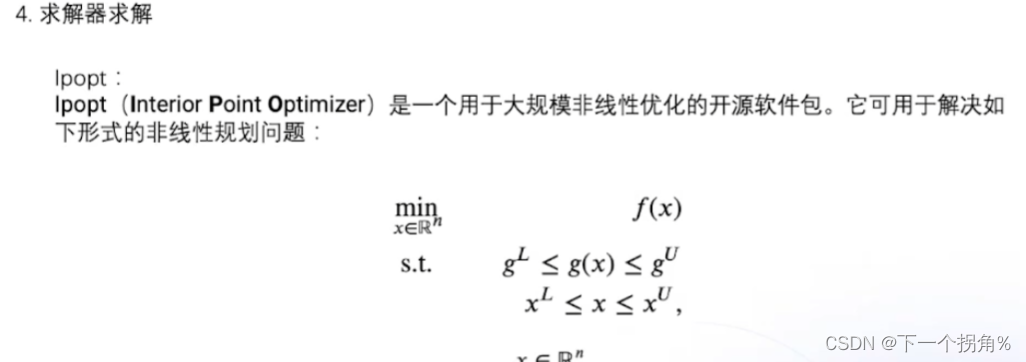
二次规划::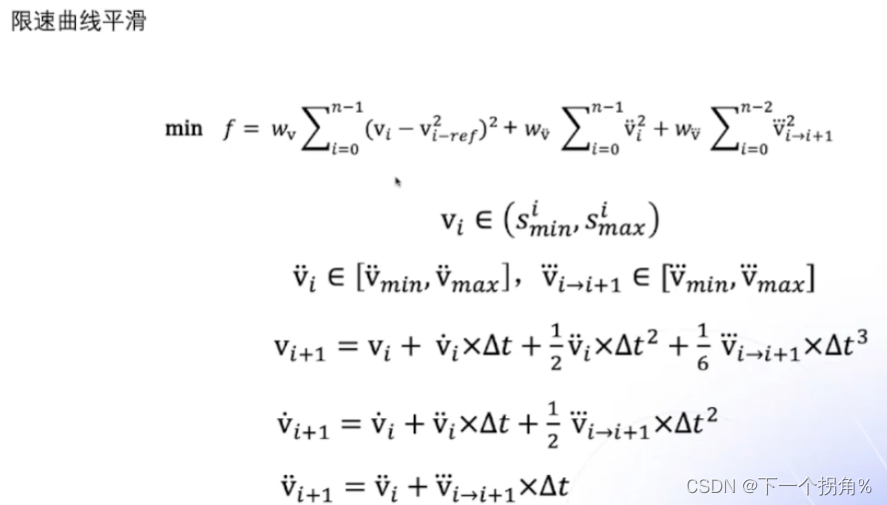
为了有解并且可导,所以不能像二次规划一样设置硬约束,要设置一定范围波动的软约束::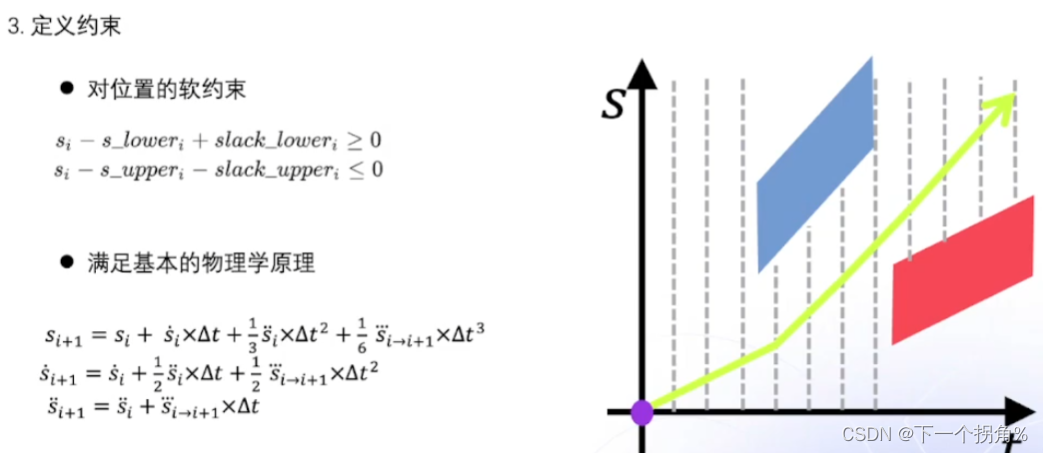
可以不限制函数的形式,但是目标约束的函数要二阶可导,
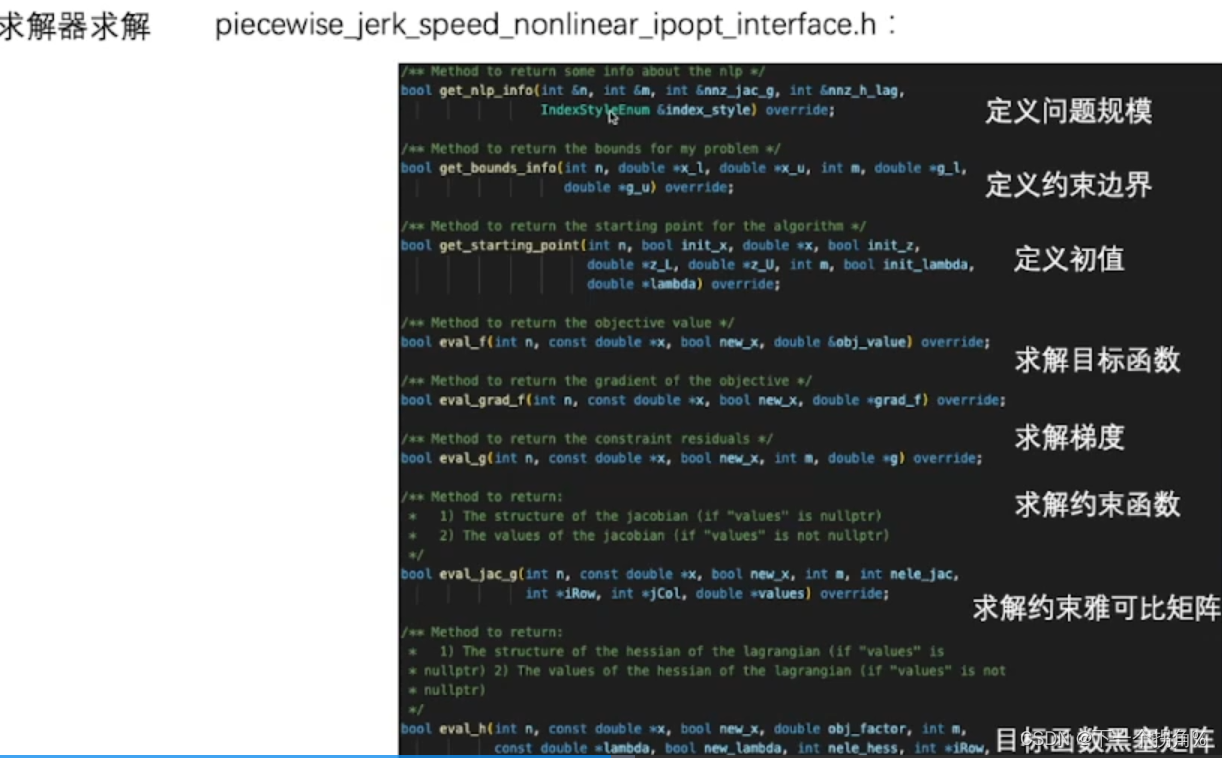
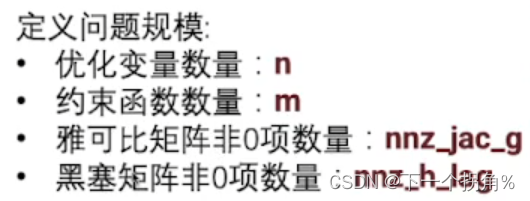
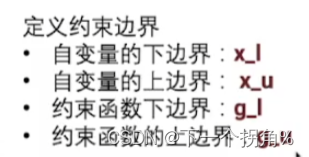
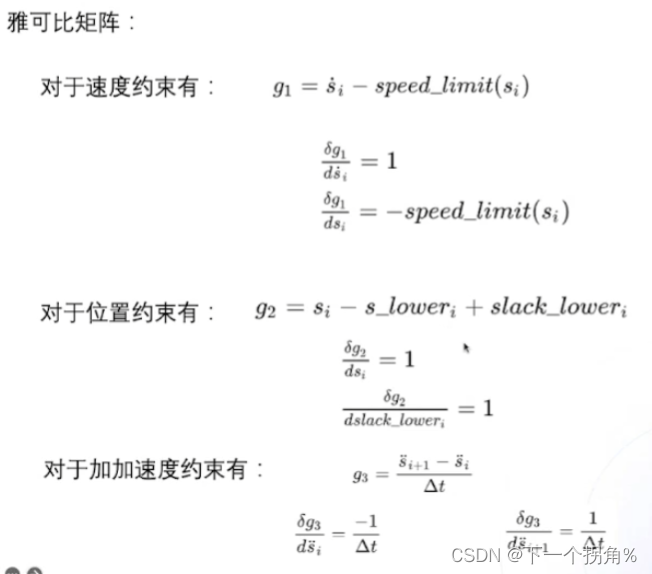
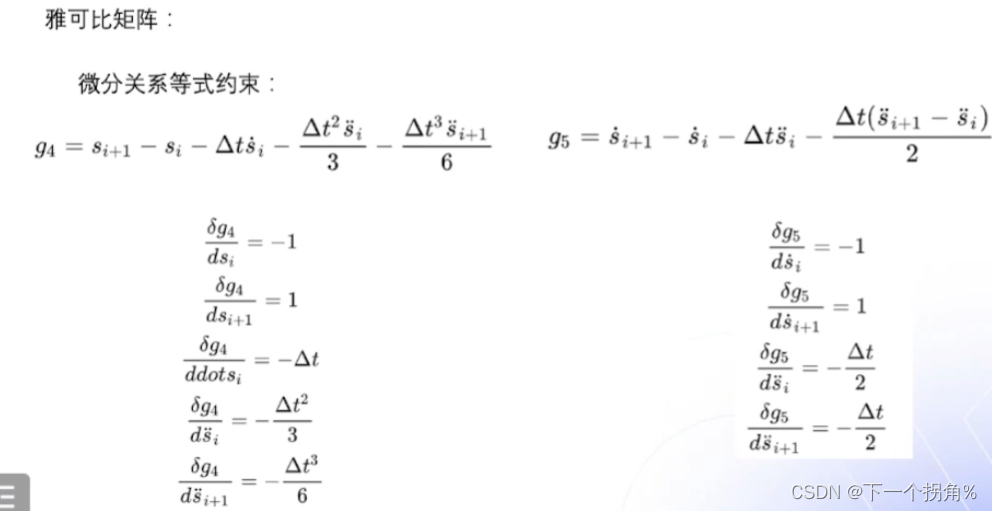
三个get函数的定义::

根据二次优化生成一条符合速度约束的速度初始曲线::作为非线性的初始
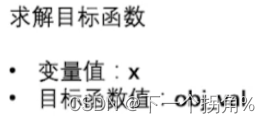
eval函数的定义:
为了获得方向需要目标函数的梯度::梯度


雅可比矩阵::向量梯度组成的矩阵::
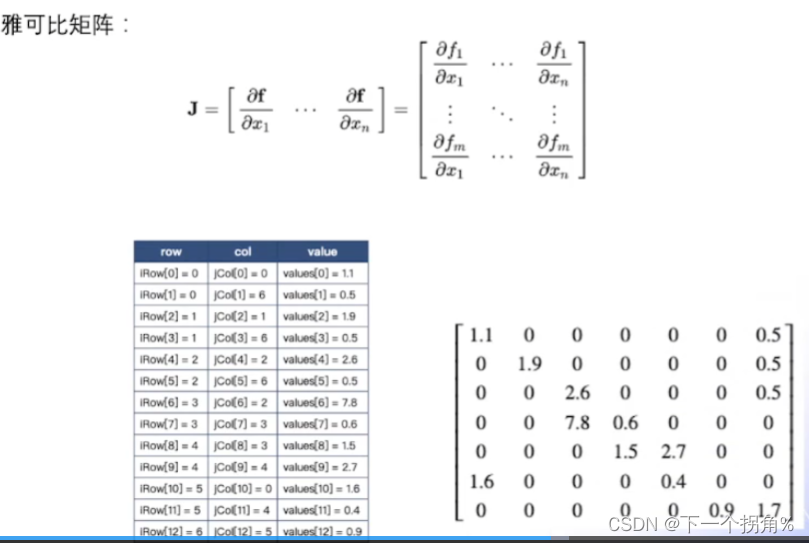
为了加快求解器的求解速度,只要给出非0元素的位置和值就可以
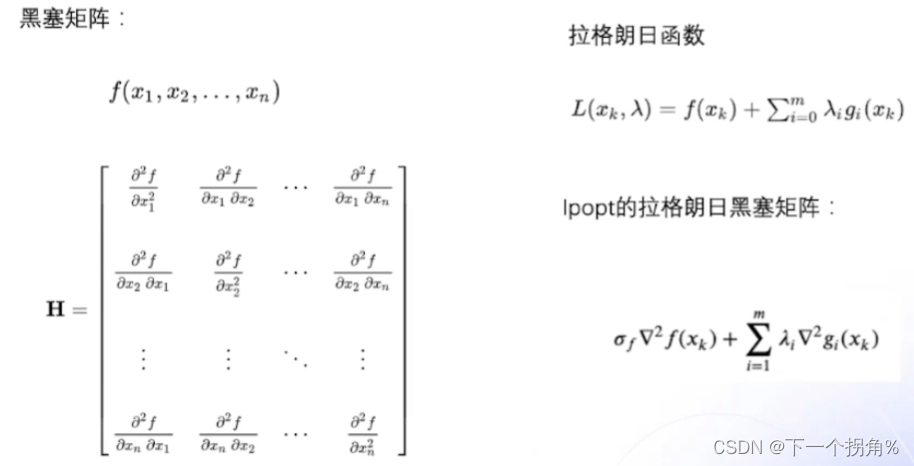
黑塞矩阵:实值函数所有二阶偏导数组成的矩阵。对拉格朗日函数求黑塞矩阵。


算法实践
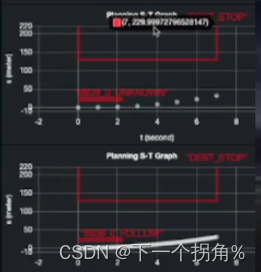
上面是动态规划的ST曲线,下面是非线性规划的ST曲线
打开notebook新建python3时,报错::


















 1234
1234

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









