







带传送链和行走轴的双机器人多工作台工作站
仿真效果视频演示
多机器人协作搬运工作站
技术难点:
- 环境与布局搭建
- IO信号设置与机器人通讯
一、工作任务:
使用Robot、Machine、Link和附加part等,建立并调通一个双机器人协作搬运的工作站。
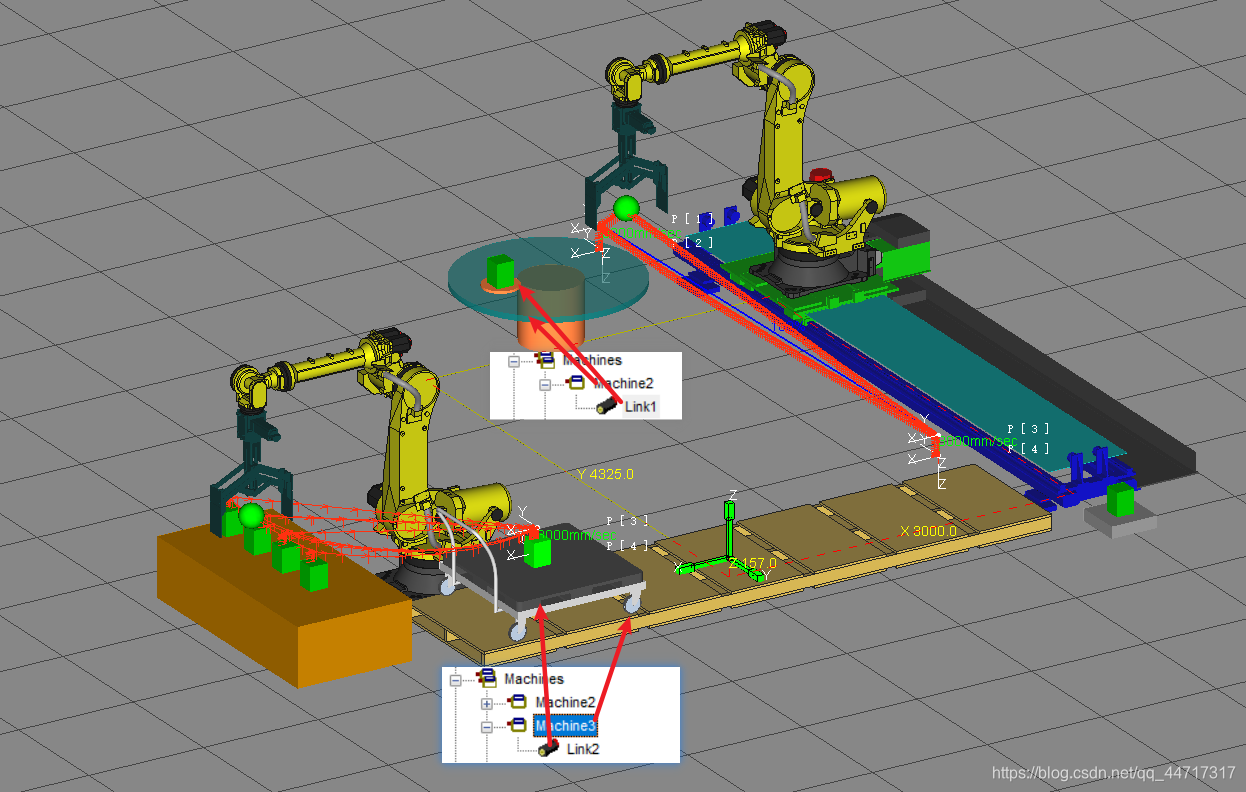
二、任务描述:
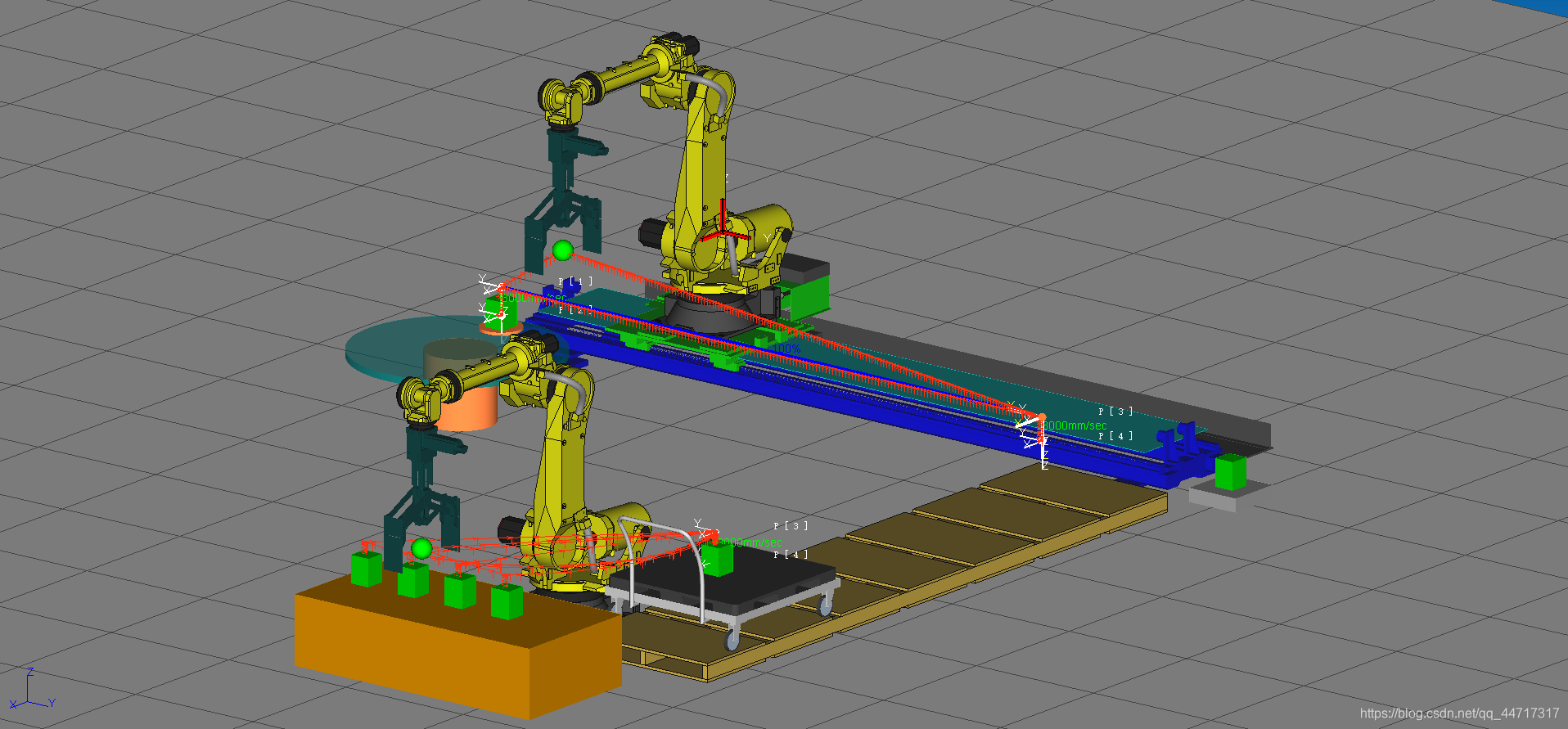
如图所示,工作站包含了一个旋运旋转台,一台带有导轨的工业机器人。一套物料转运传输架和一台物料码垛机器人。
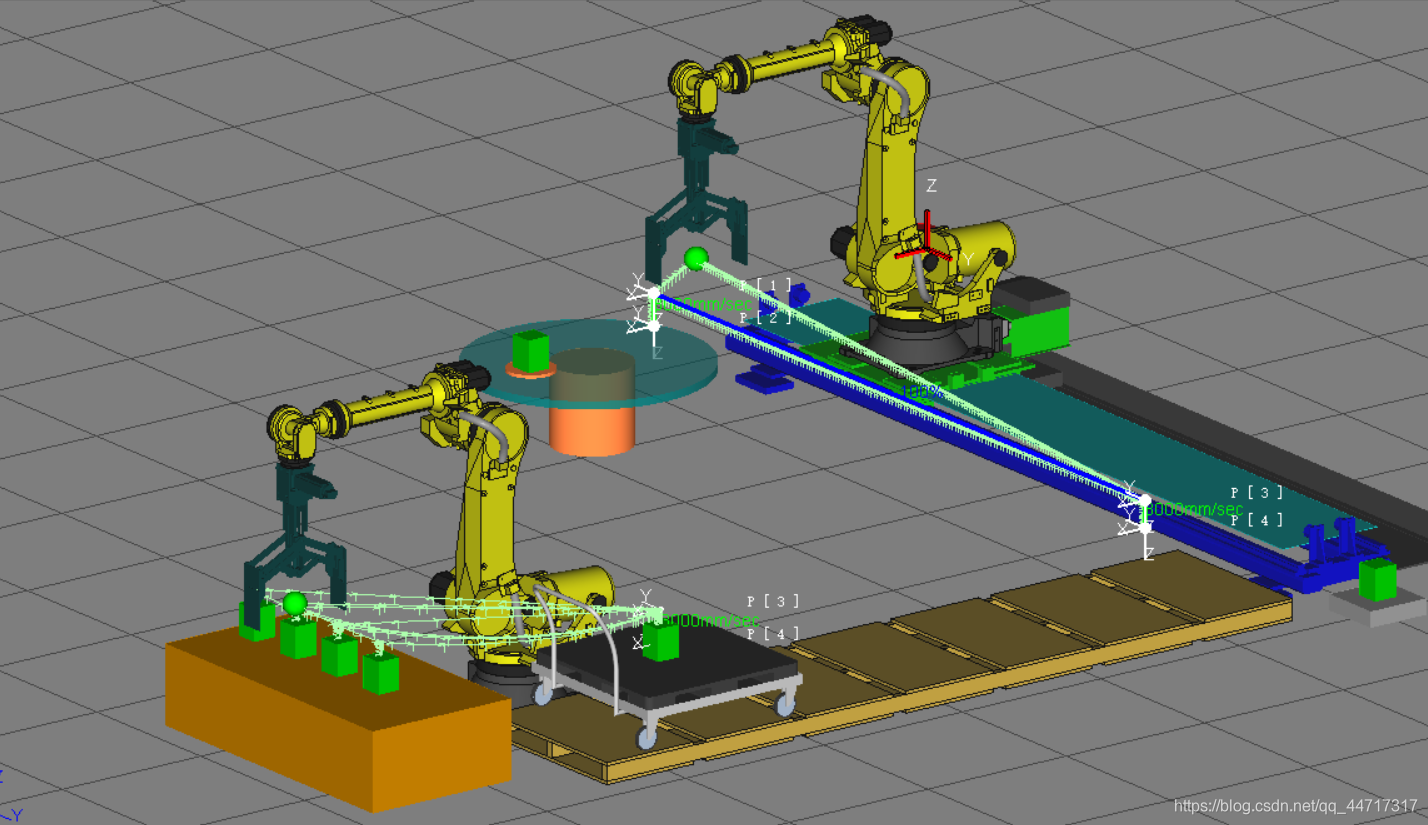
其工作过程可描述如下:
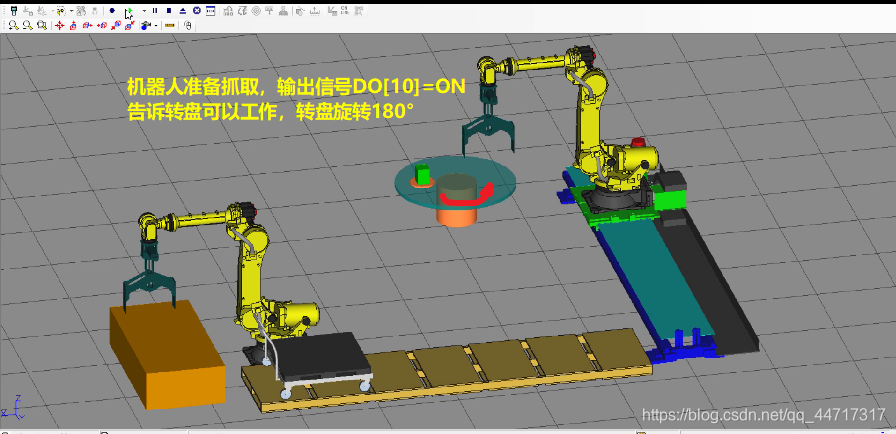
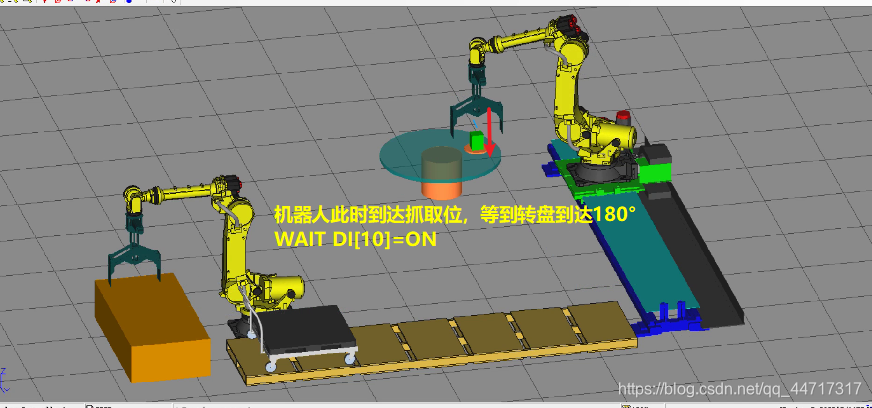
- (1)、旋转台转动180度把物料搬运到机器人1下方位置,等待机器人1抓取,同时输送链托盘沿着传输架回到靠近机器人1导轨的那一侧
- (2)、机器人1由当前位置往下运动,靠近旋转台物料后开始抓取物料。
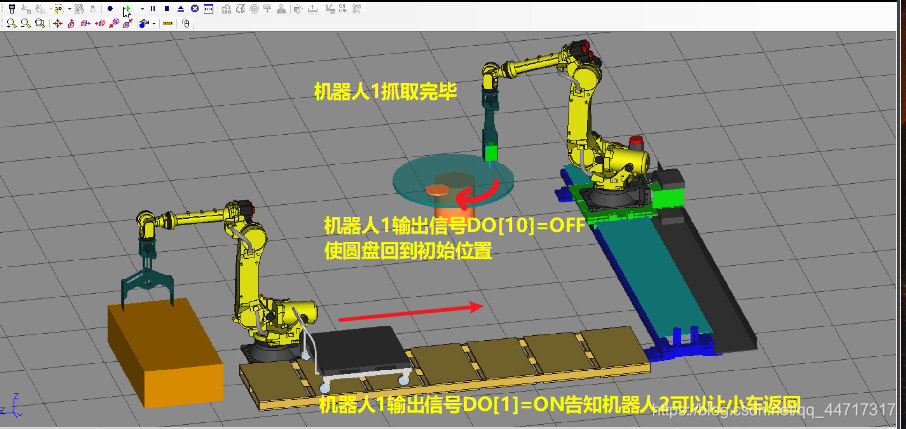
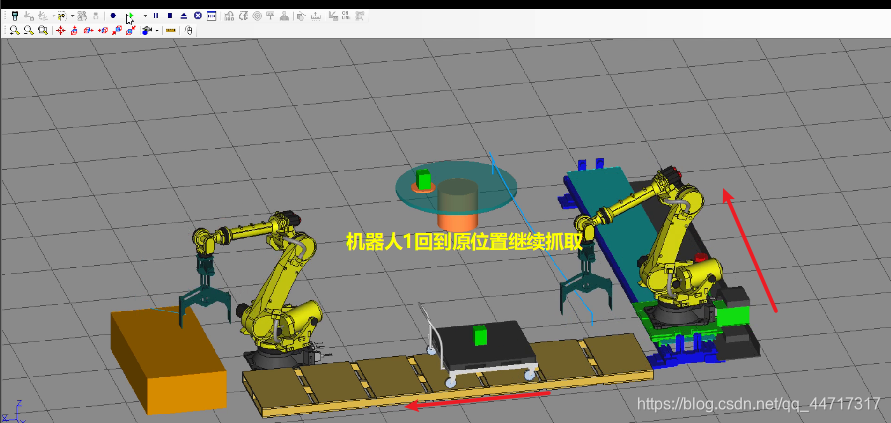
- (3)、抓取物料后,机器人1手臂上移,并沿着导轨运动到输送链那侧。同时,旋转台旋转180度回到初始位,开始载入另一个物料
- (4)、机器人1手臂下移,把物料放到输送链。
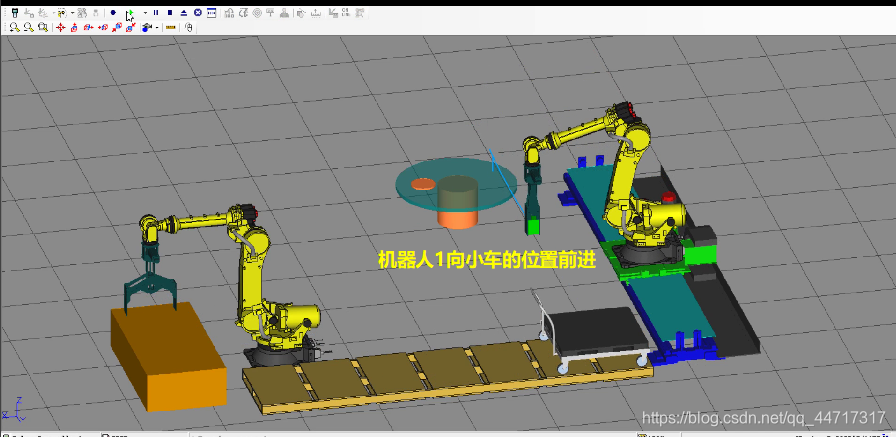
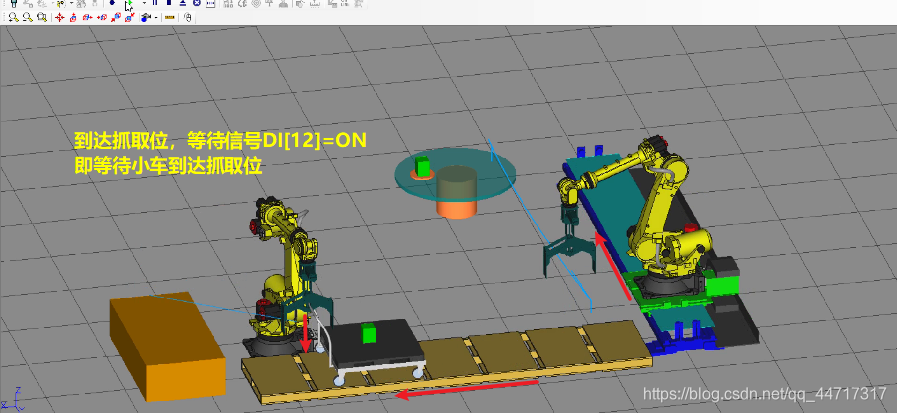
- (5)、物料放入后,机器人1回到靠近旋转台的那一侧,同时,输送链带着物料沿着传输架运动到靠近机器人2的那一侧。
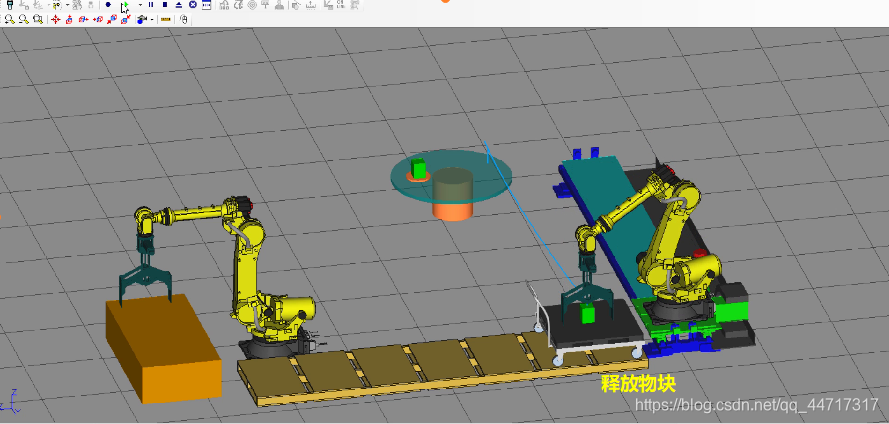
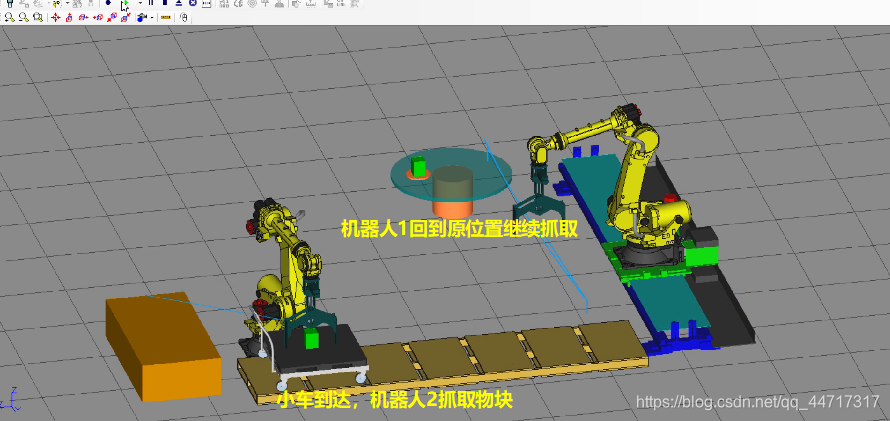
- (6)、机器人2抓取物料,并把物料放置到码放框中的第一个位置,同时旋转台旋转180度,把另一个-物料运送到机器人1下方
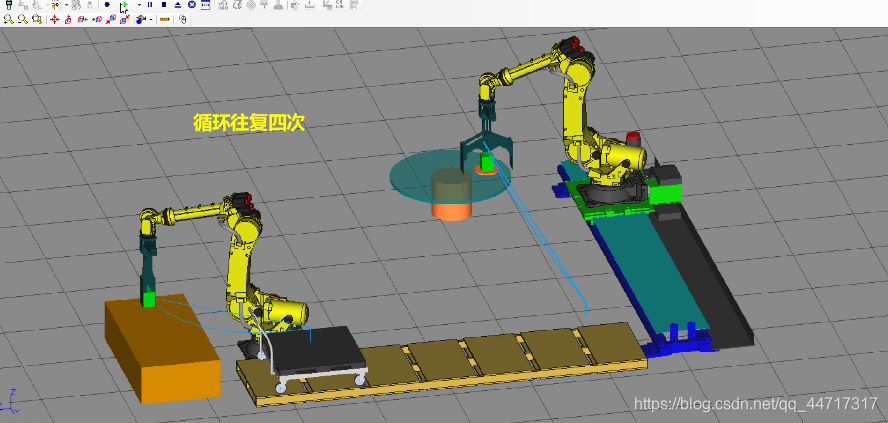
- (7)、重复(2)一(7),分别把物料2、物料3、物料4放到对应的物料码放框位
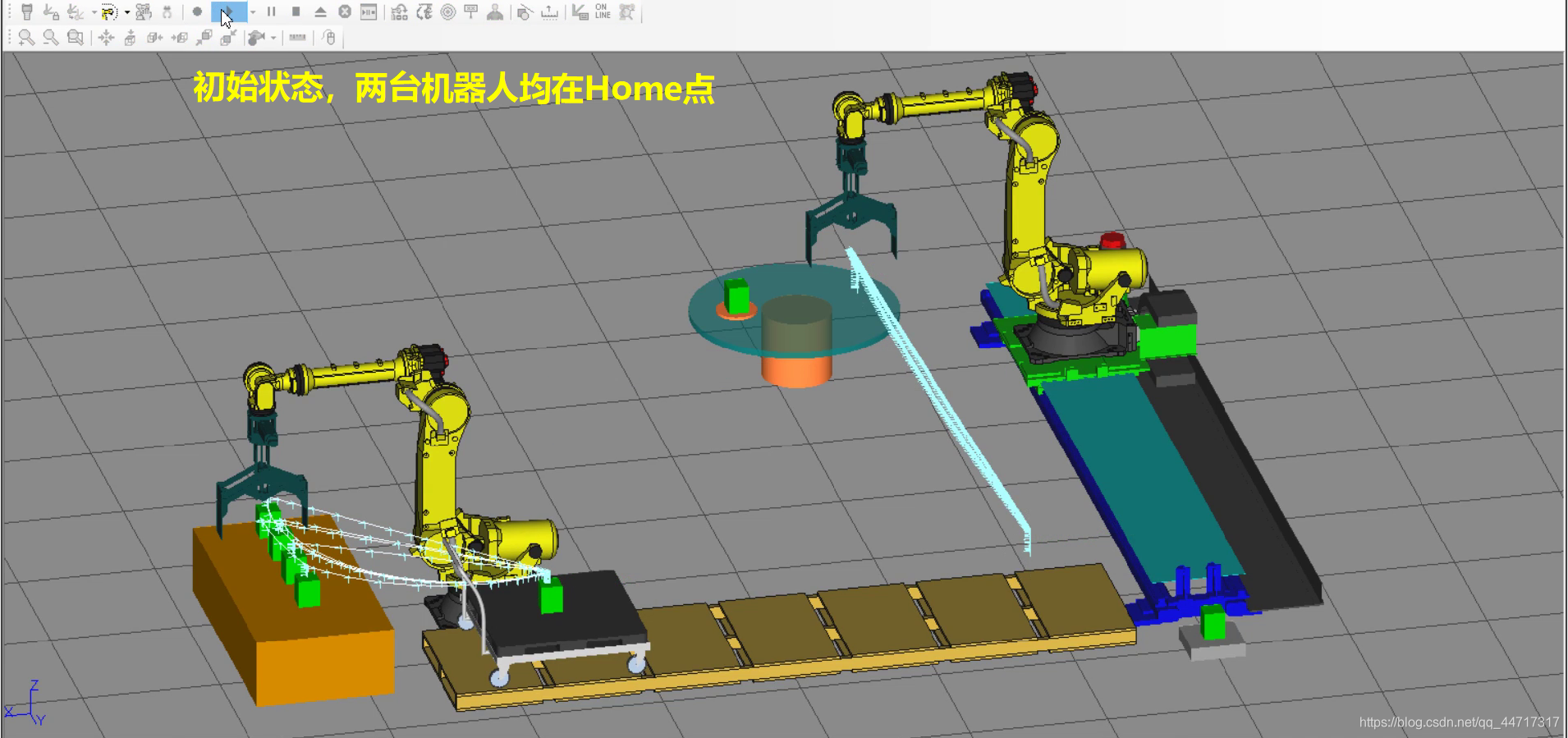
- (8)、4个物料码放完毕,两台机器人回到初始位置,完成工作。
三、 任务实施
1. 环境搭建
本项目的环境搭建结合下面两篇博客即可,不做赘述;
- 首先搭建一个带行走轴的机器人1,参考下面的文章
- 其次选择新添加机器人,并按照下面的文章参考搭建,几乎一样;
2. IO信号设置
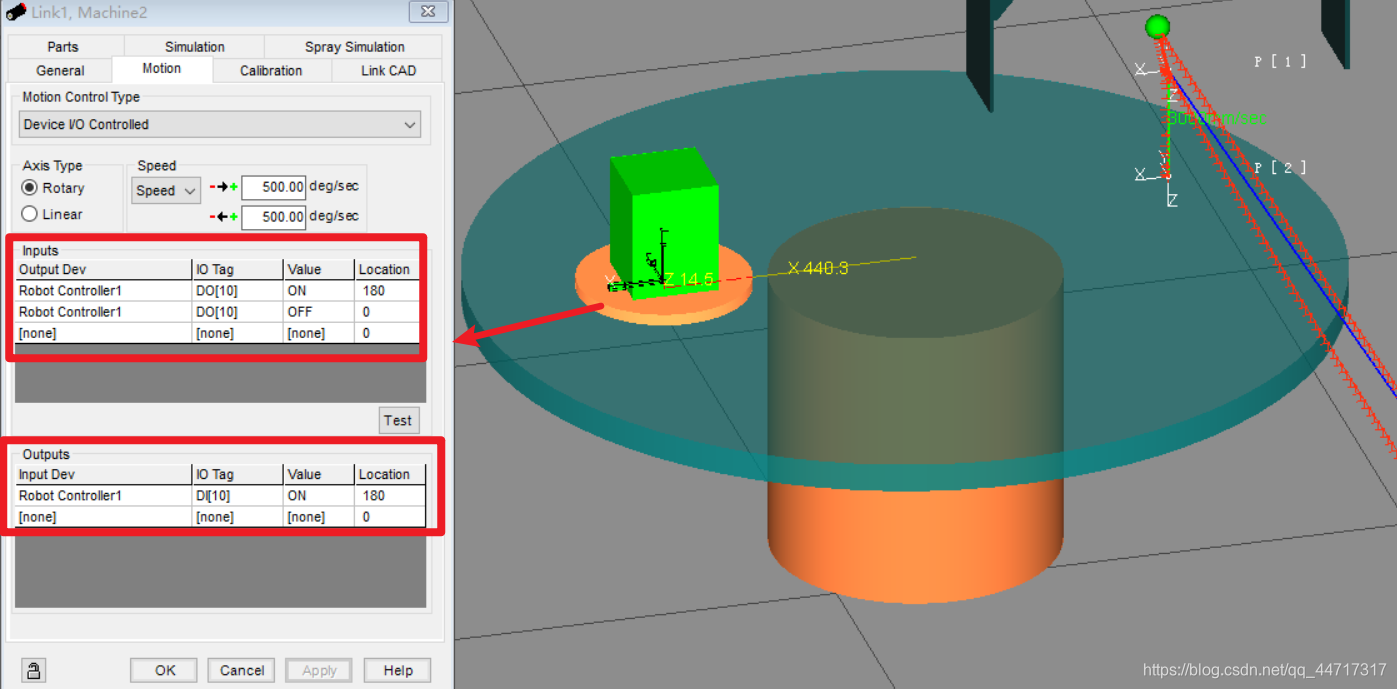
转盘上Link的IO信号设置
DO[10] ON 180 输出信号10 由机器人1释放 开启为旋转到180°
DO[10] OFF 0 关闭为旋转到°
DI[10] ON 180 输入信号10 有机器人1检测 检测旋转到180° 机器人1开始抓取操作
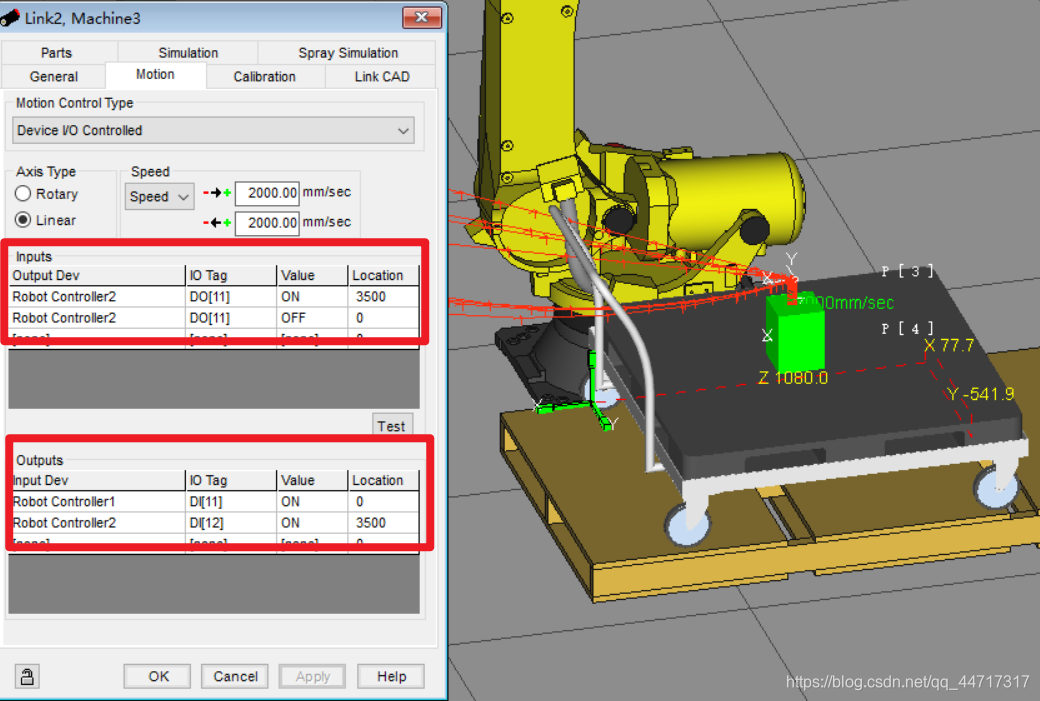
小车上Link的IO信号
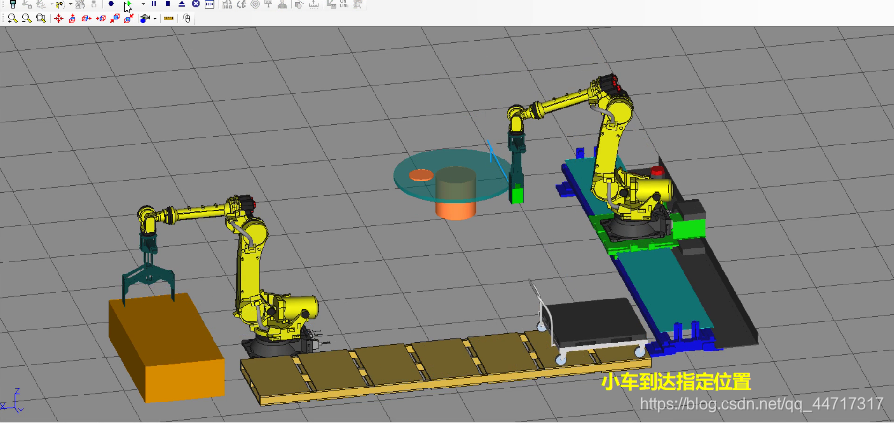
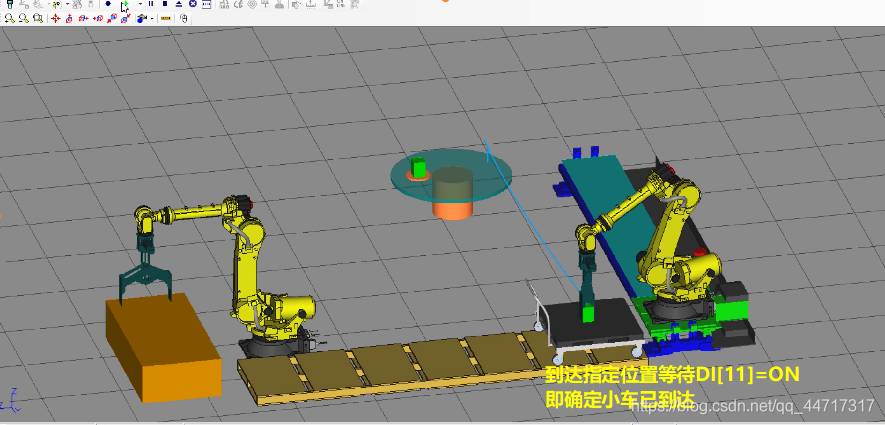
DO[11] ON 3500 输出信号11 由机器人2释放 ON状态时小车到达3500位置
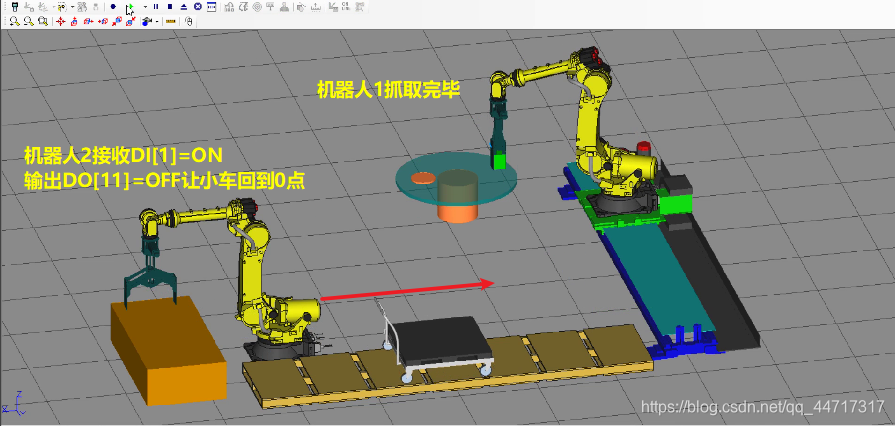
DO[11] OFF 0 OFF状态时小车到达0位置
DI[11] ON 0 输入信号11 由机器人2检测 ON表示检测小车是否到达0位置
DI[12] ON 3500 OFF表示检测小车是否到达3500位置
机器人通讯信号
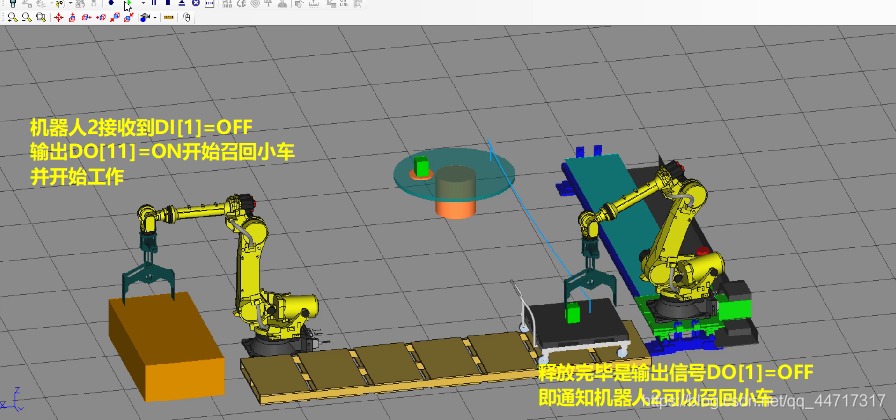
机器人1对机器人2的通讯;在机器人将要抓取目标位,机器人1释放DO[1]信号通知机器人2,机器人2通过DI[1]接收目标位信号,进而控制小车的来去;
1 Robot Controller1 DO 1 DO[1] Robot Controller2 DI 1 DI[1]

3. 机器人示教点设置
机器人1示教点
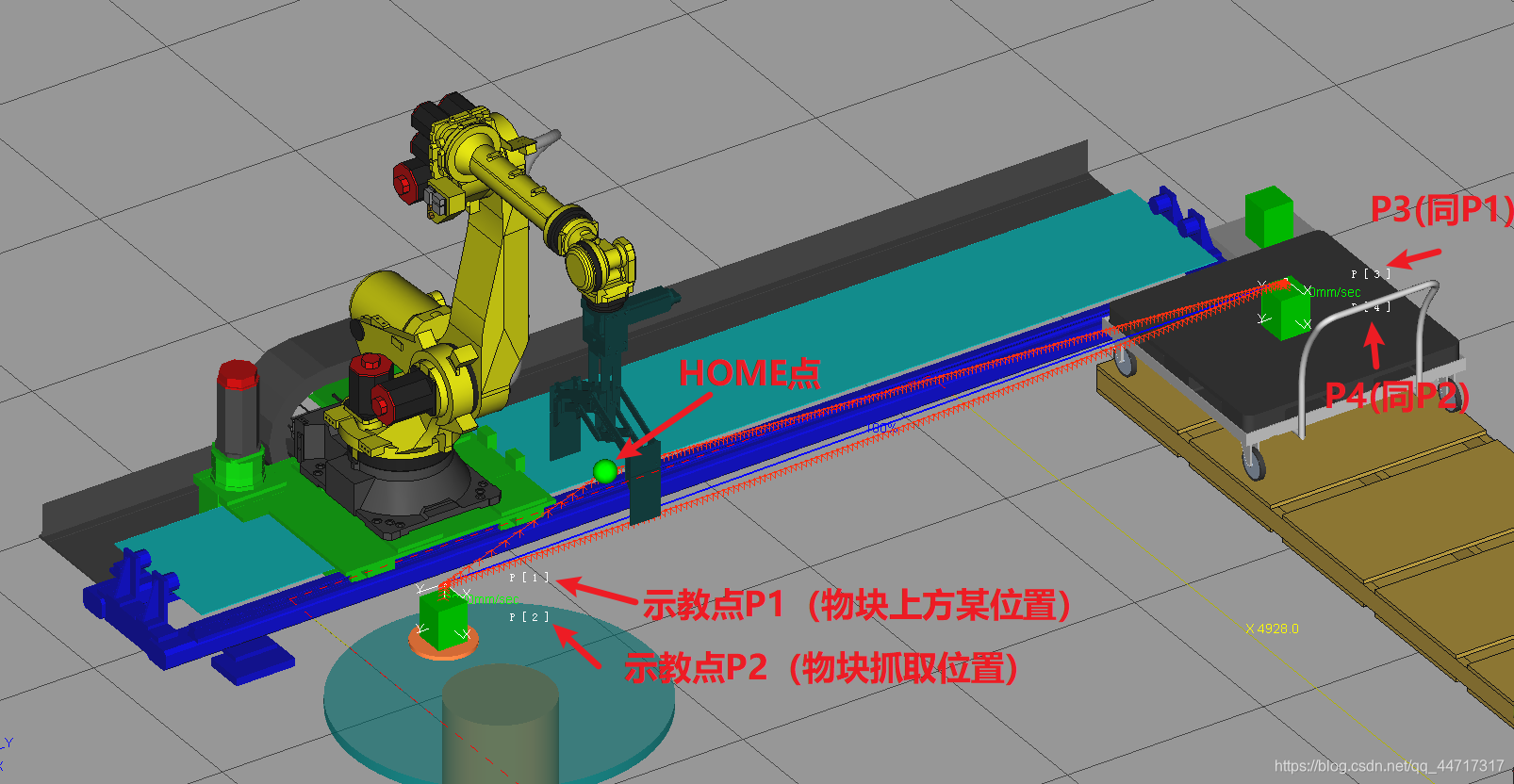
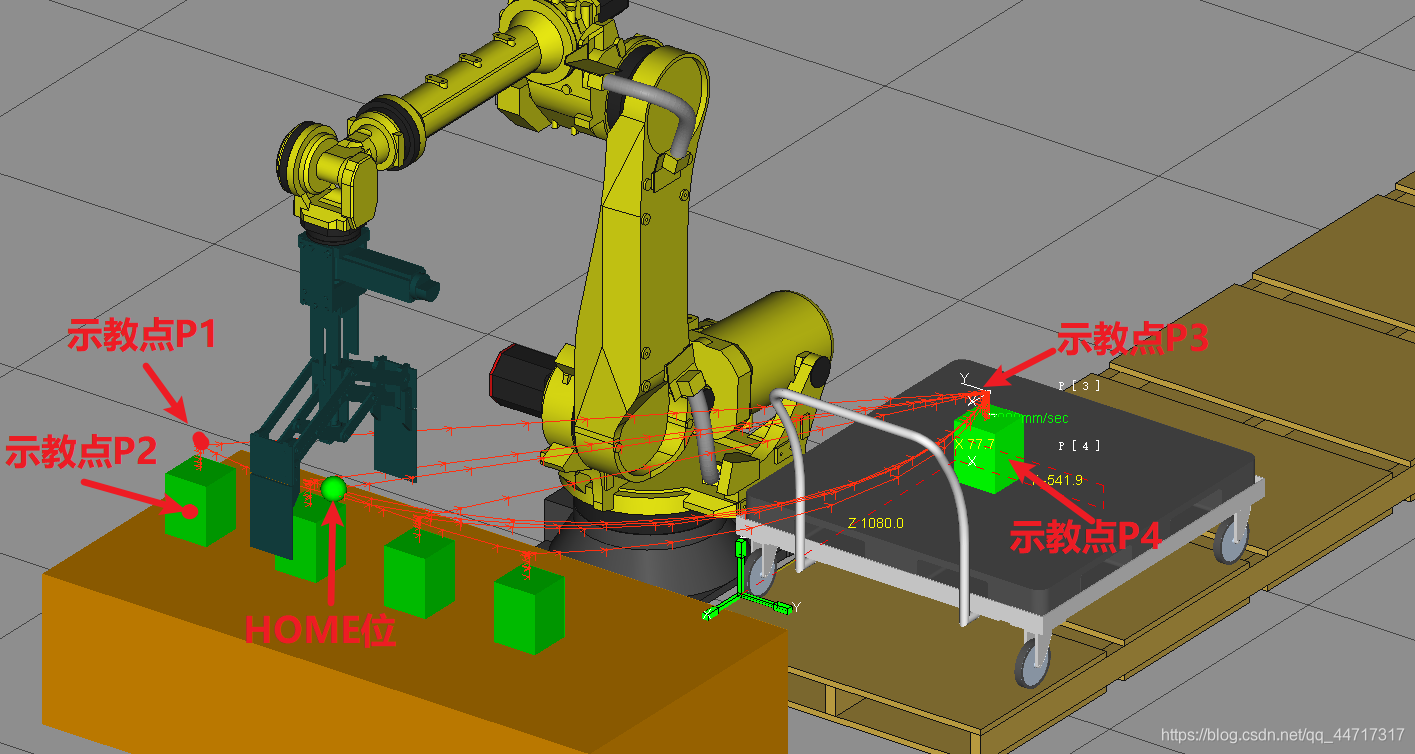
机器人2示教点
4. 机器人编程
编程中IO设计思路
机器人1编程
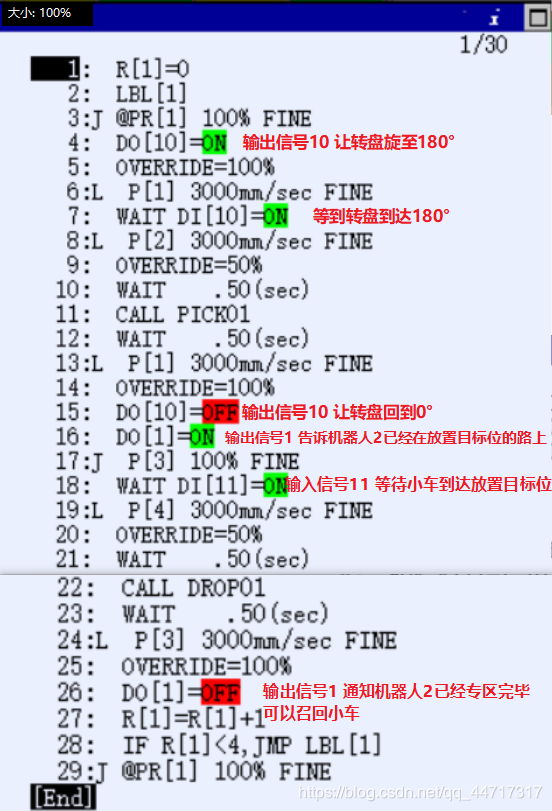
机器人2编程

TCP 轨迹图



















 4381
4381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











