







目录
2.添加本工作站的part、fixture、obstacles
一、工作任务
使用Part、Fixture、Obstacle等,建立一个机器人搬运项目。
二、任务描述
如图1所示,建立一个机器人搬运,使机器人从一个物料台上抓取物料,放置到一个物料筐内。编制程序,使得该动作循环执行。
注意编程要求:
1、人为不介入时,需不停循环搬运
2、速度安全且合适
3、抓/放给出适当停顿
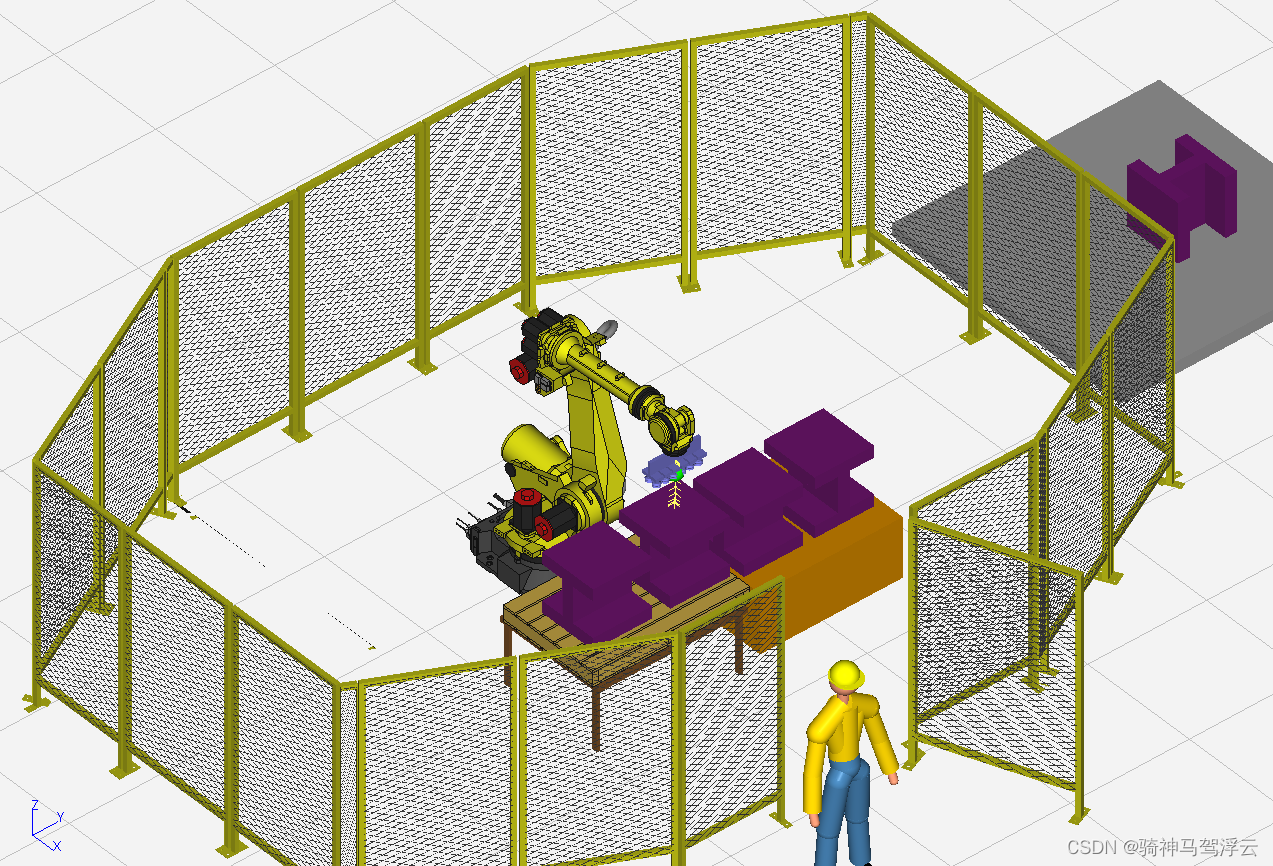
图1 整体布局
三、任务实施
1、创建机器人工作站仿真环境
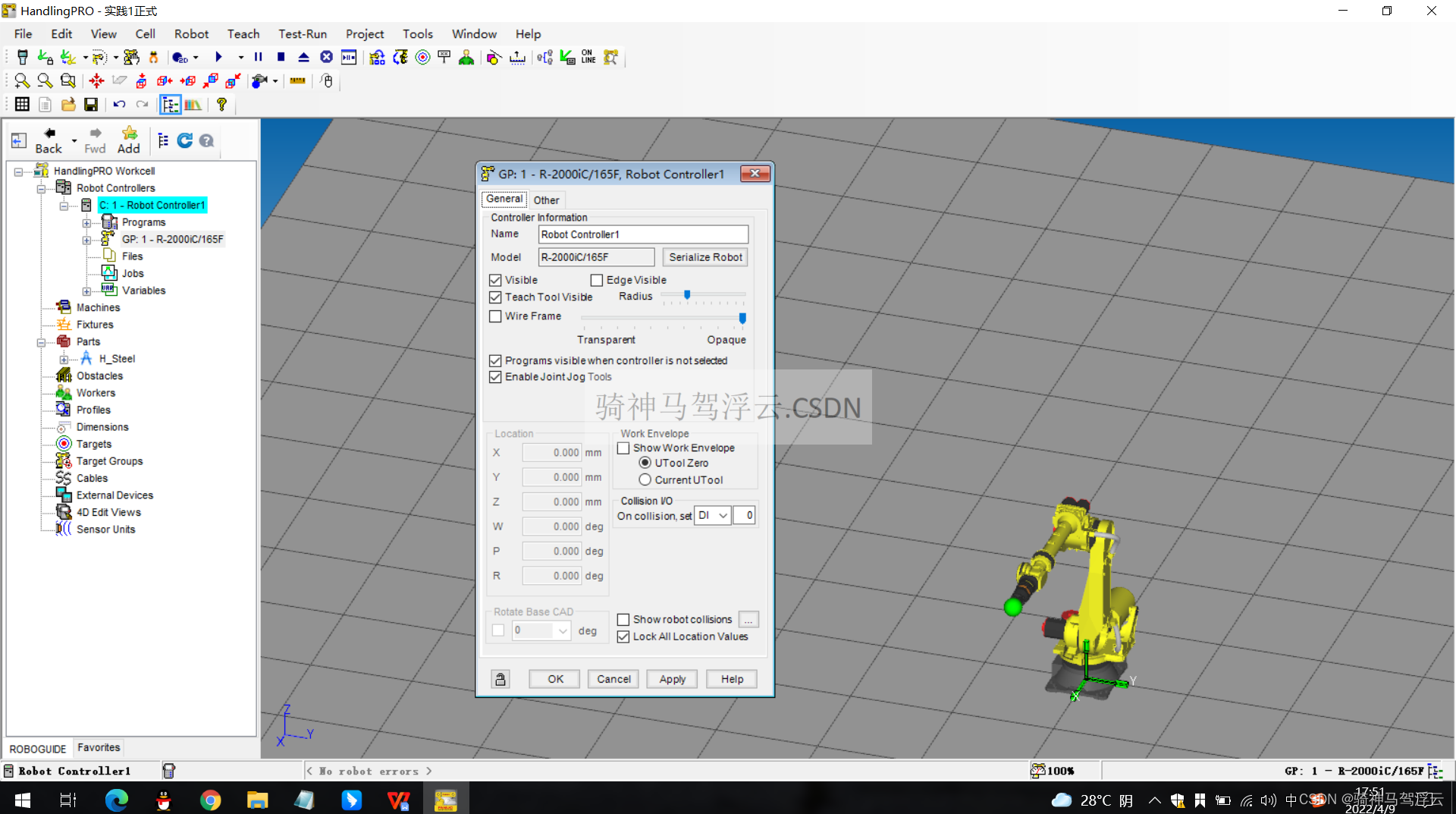
锁定机器人位置:
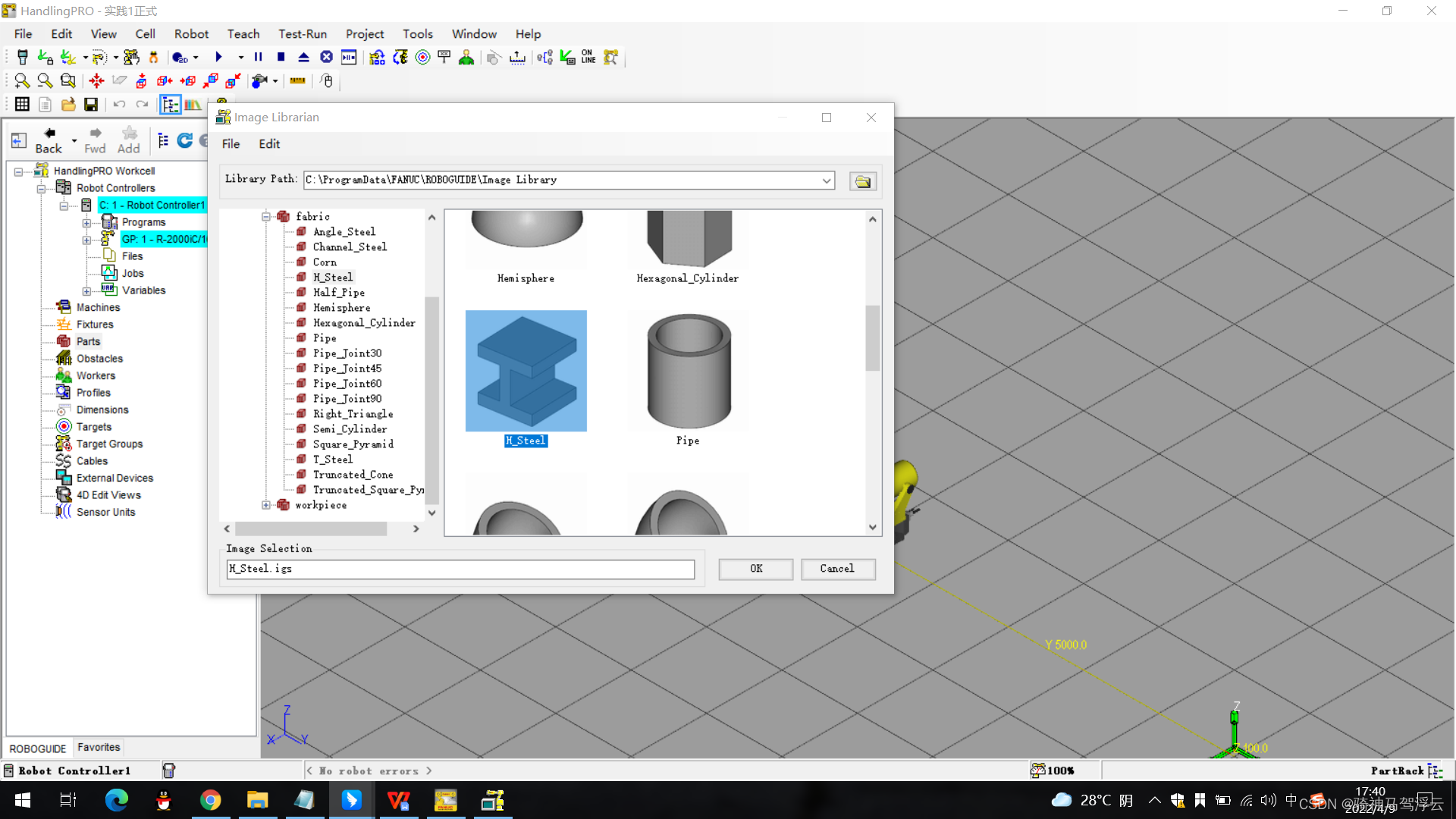
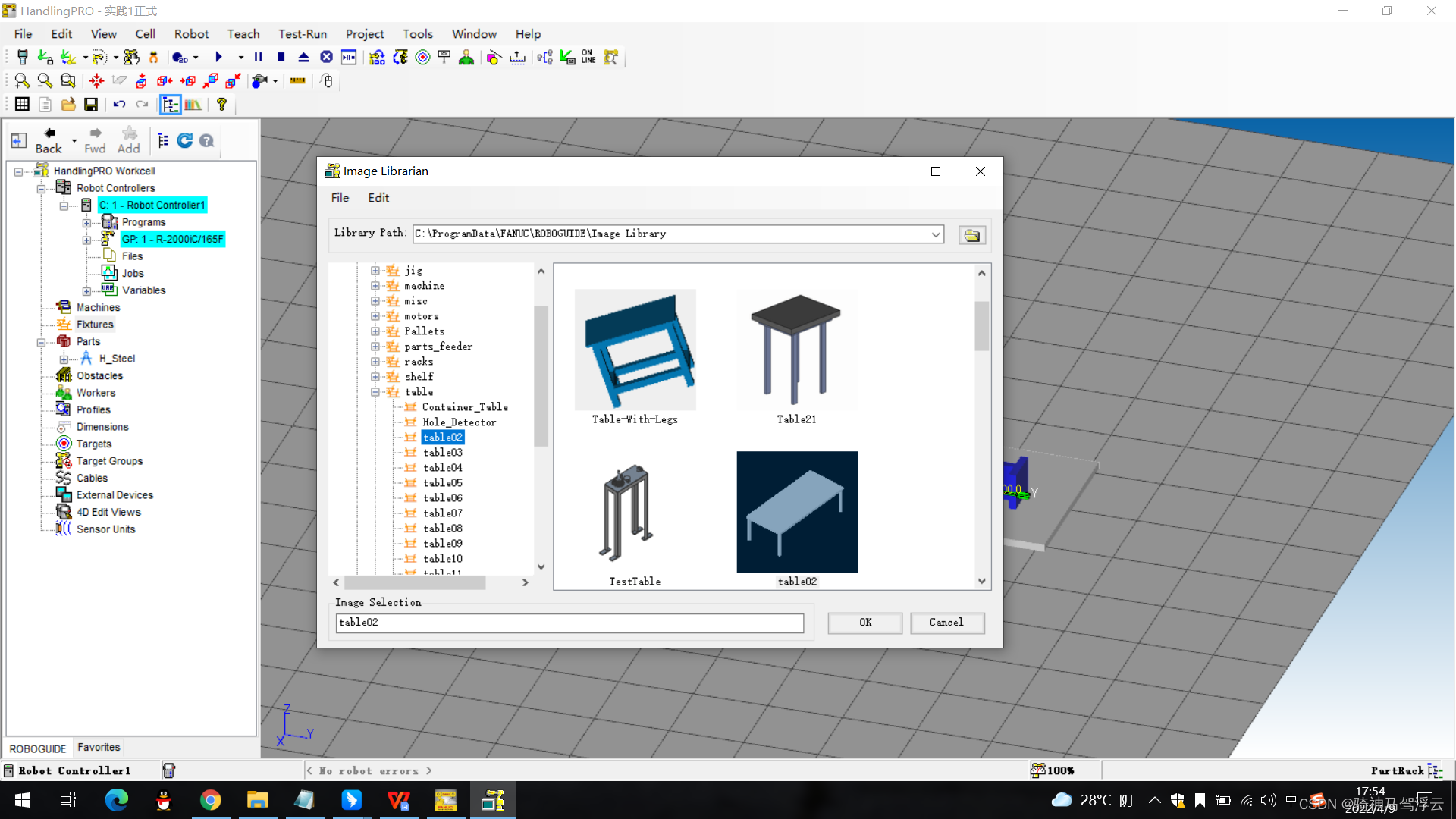
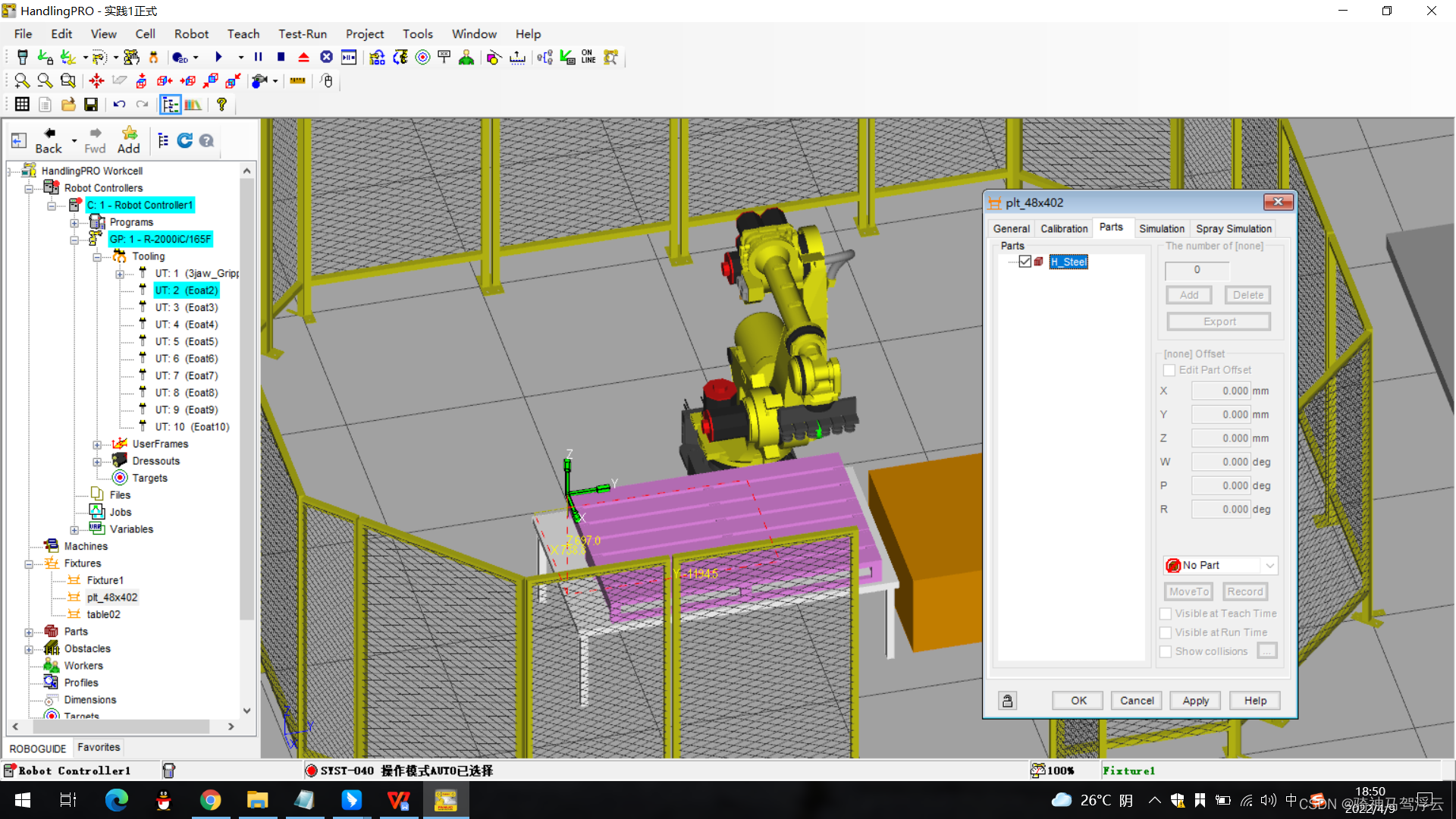
2.添加本工作站的part、fixture、obstacles
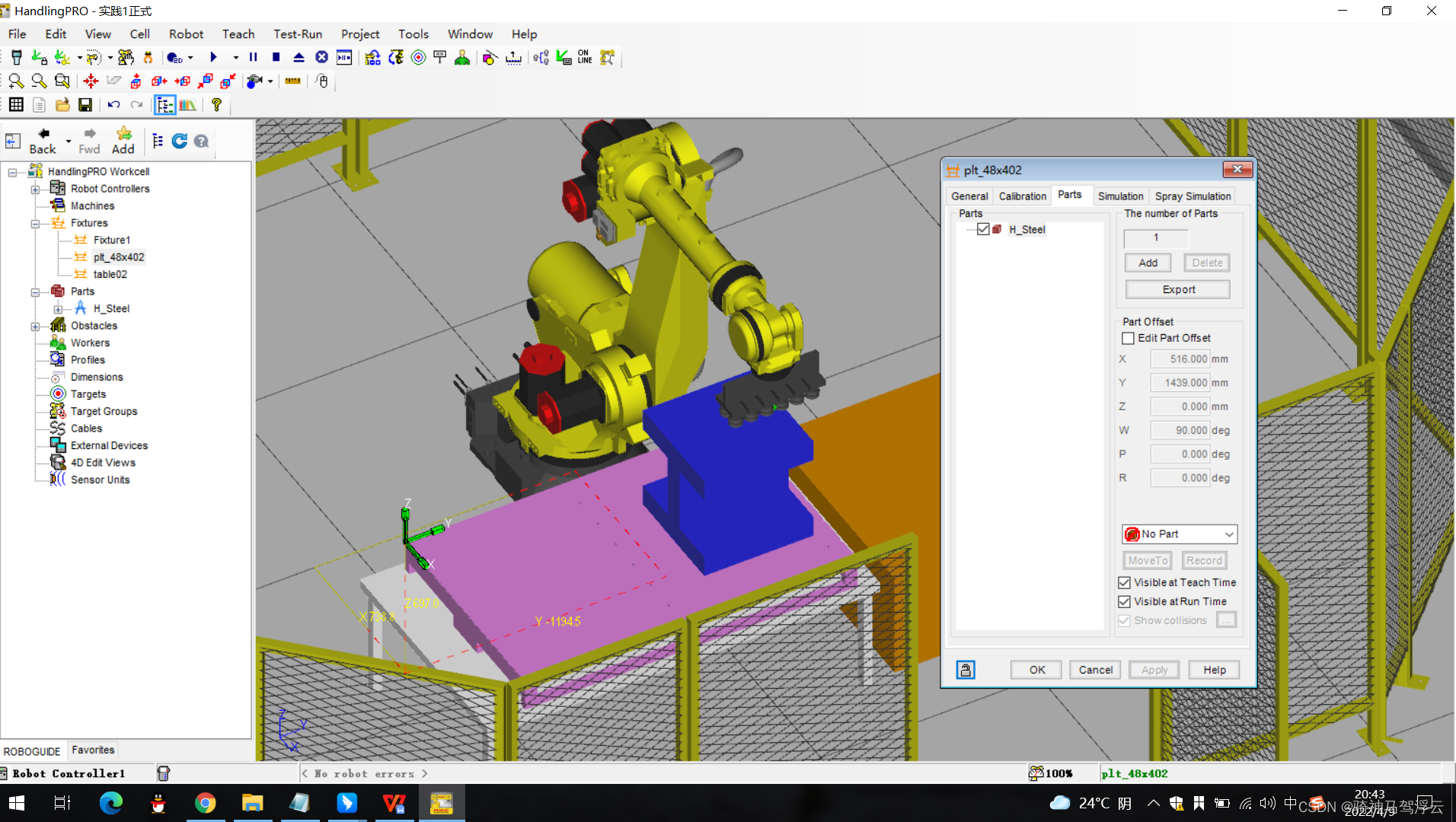
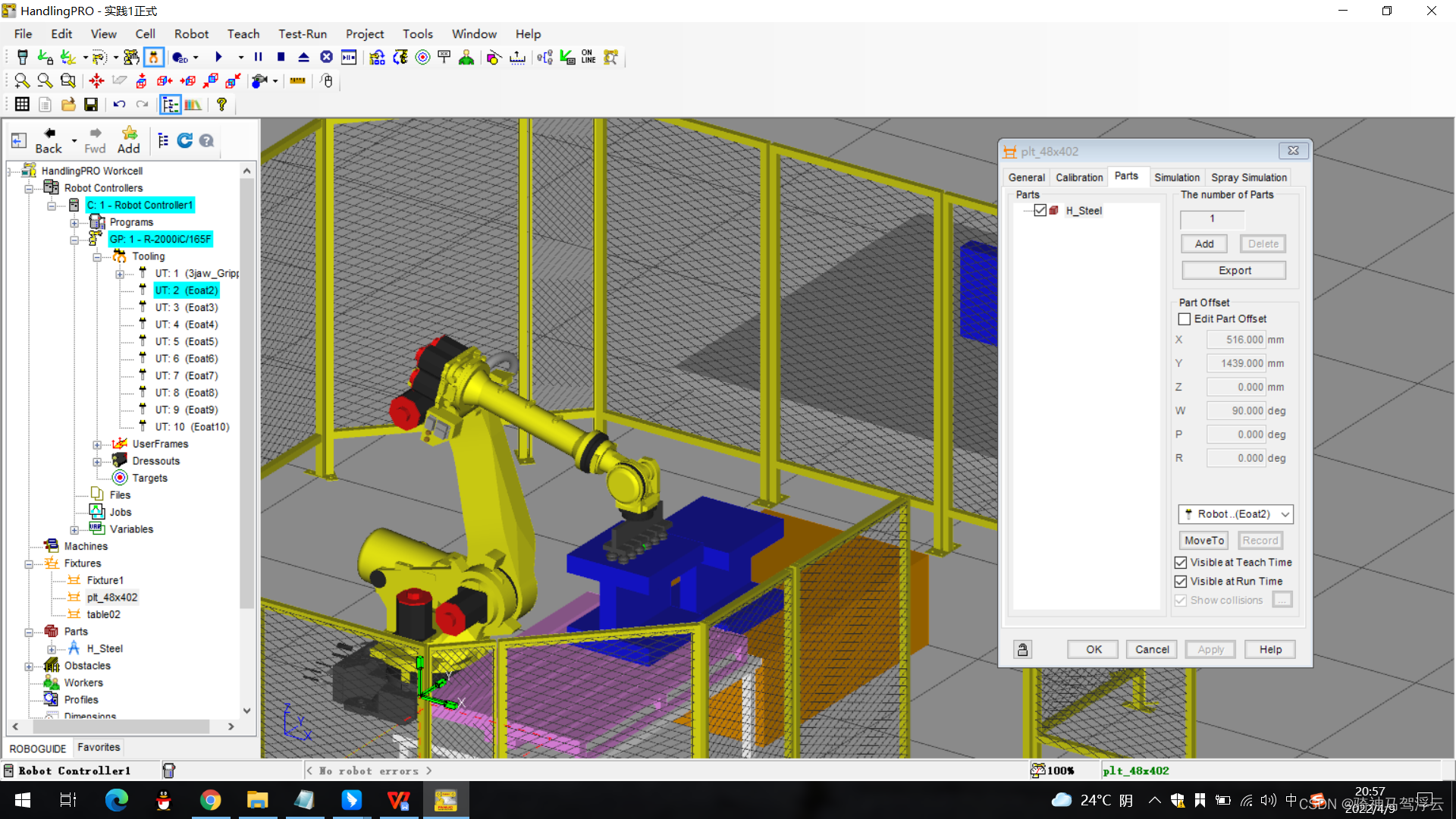
添加part:
适当调整大小:
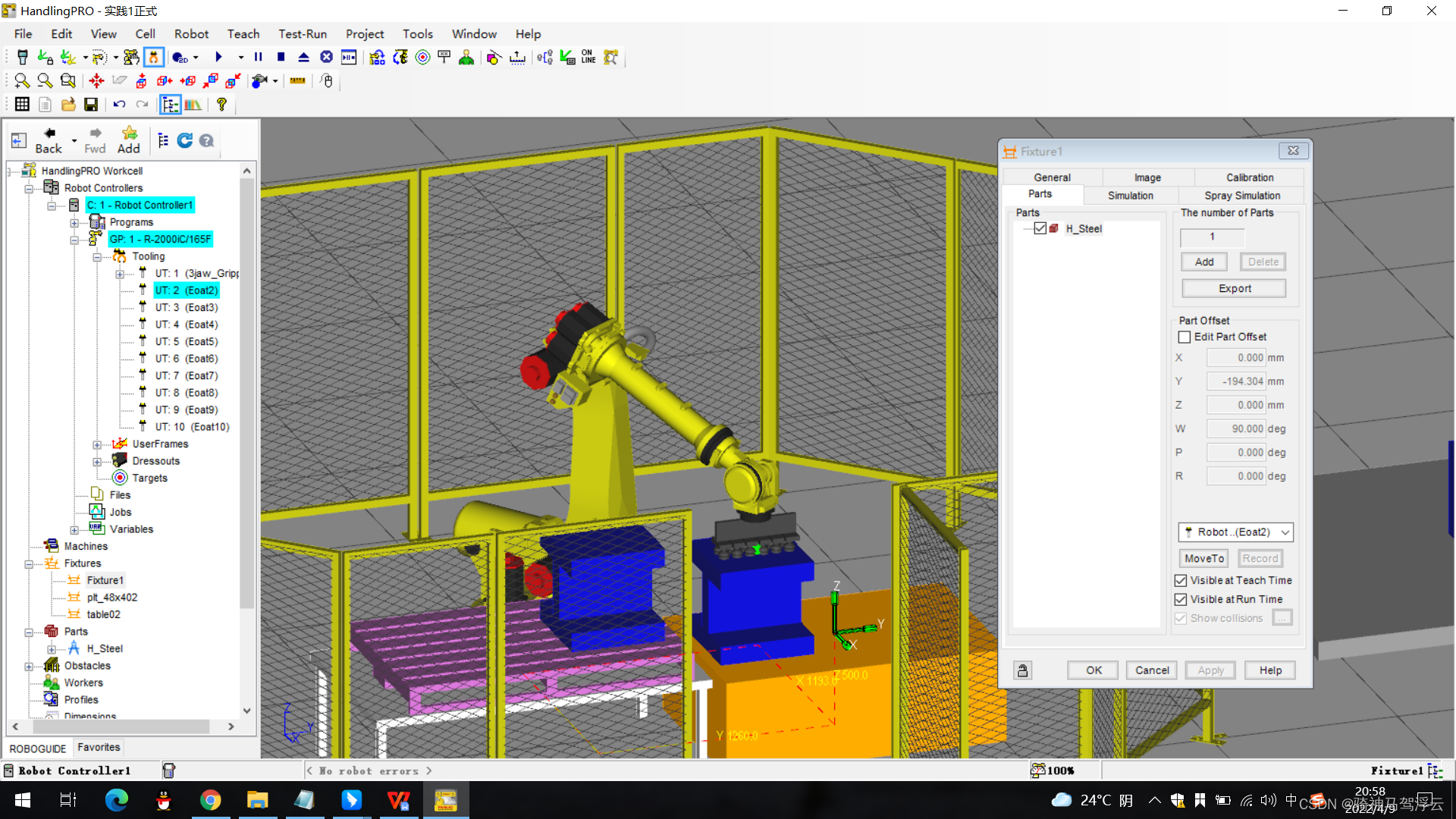
添加fixture:
调整位置以及大小:

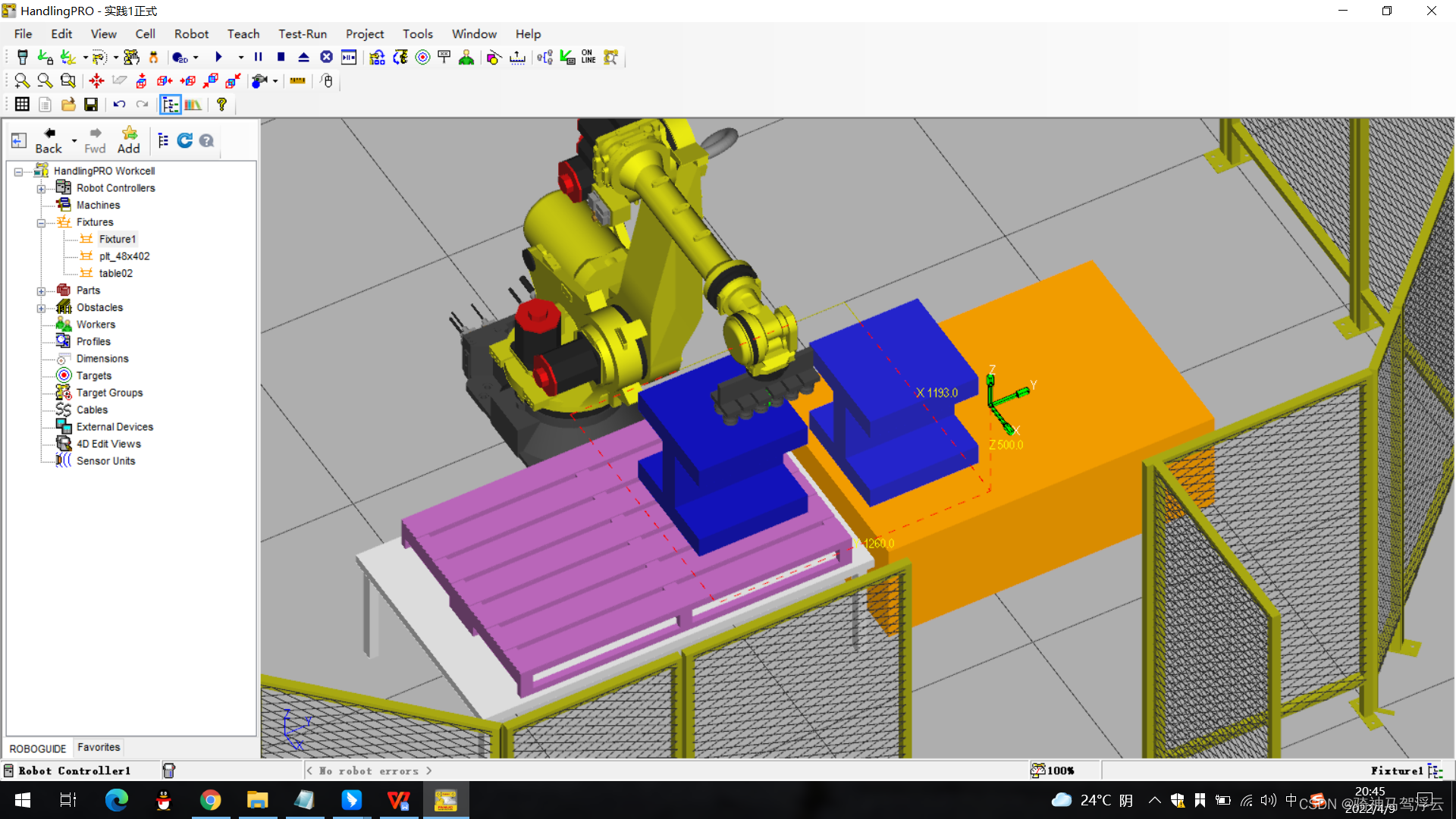
添加剩余fixture:
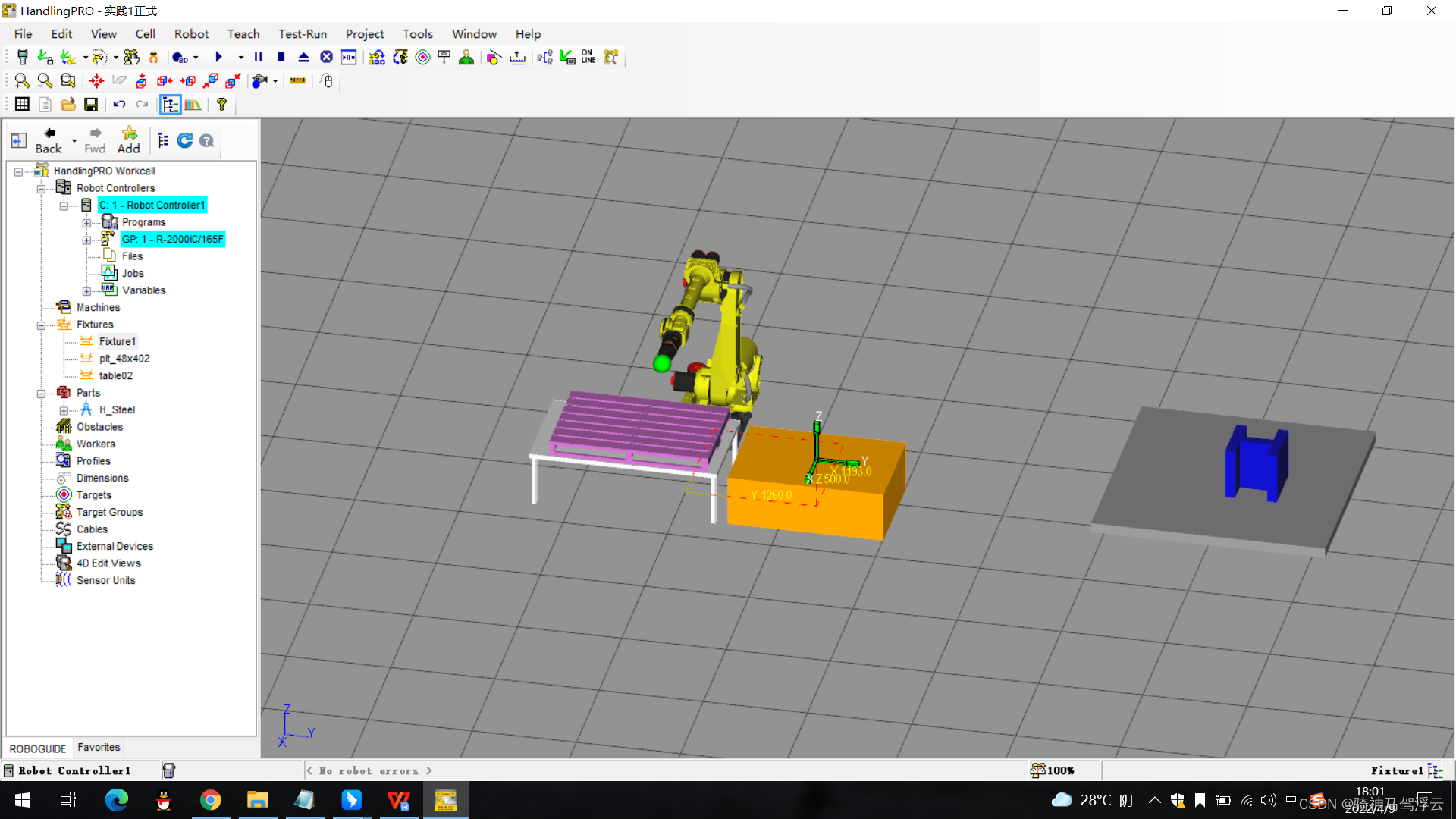
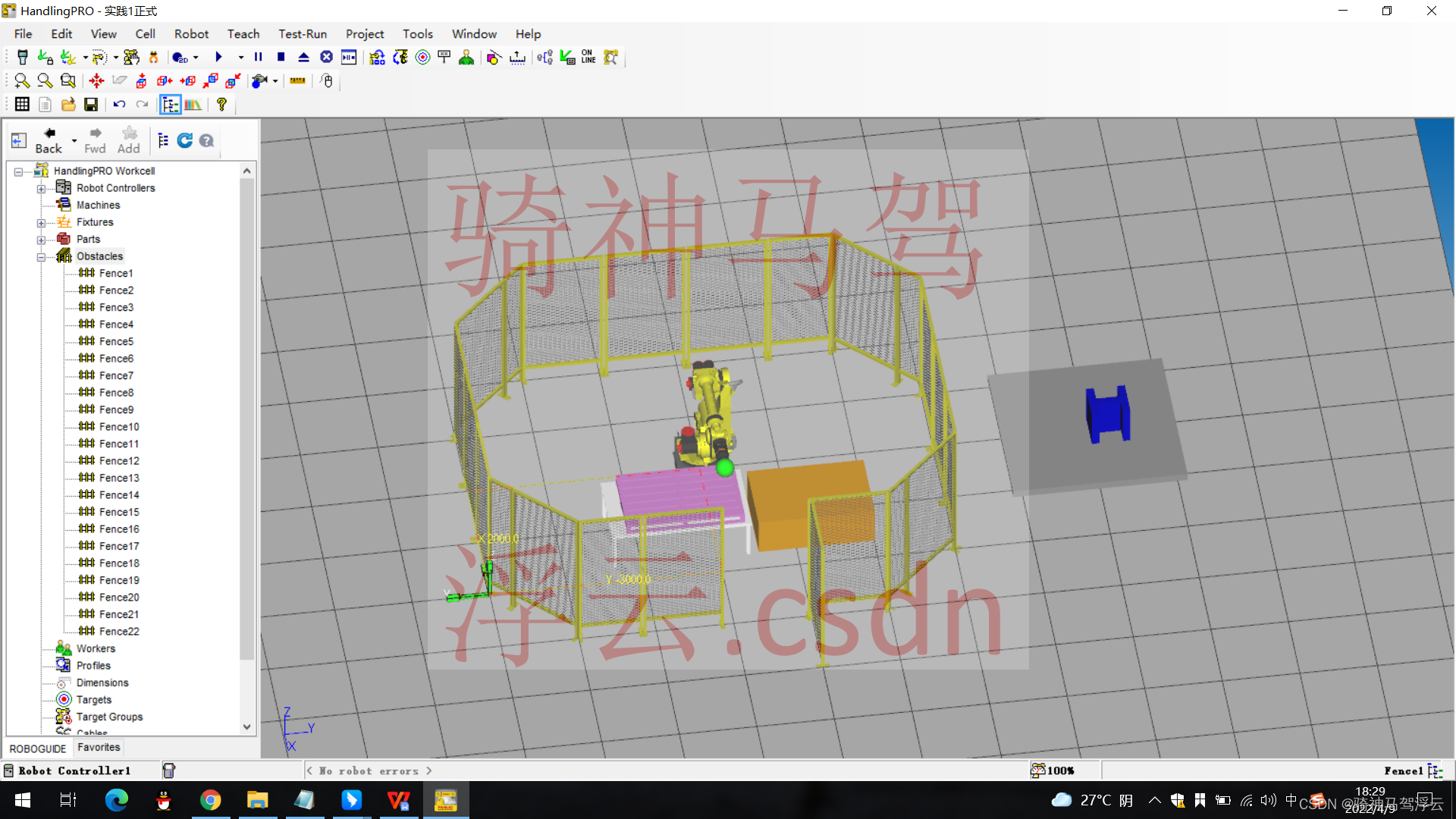
添加obstacles:
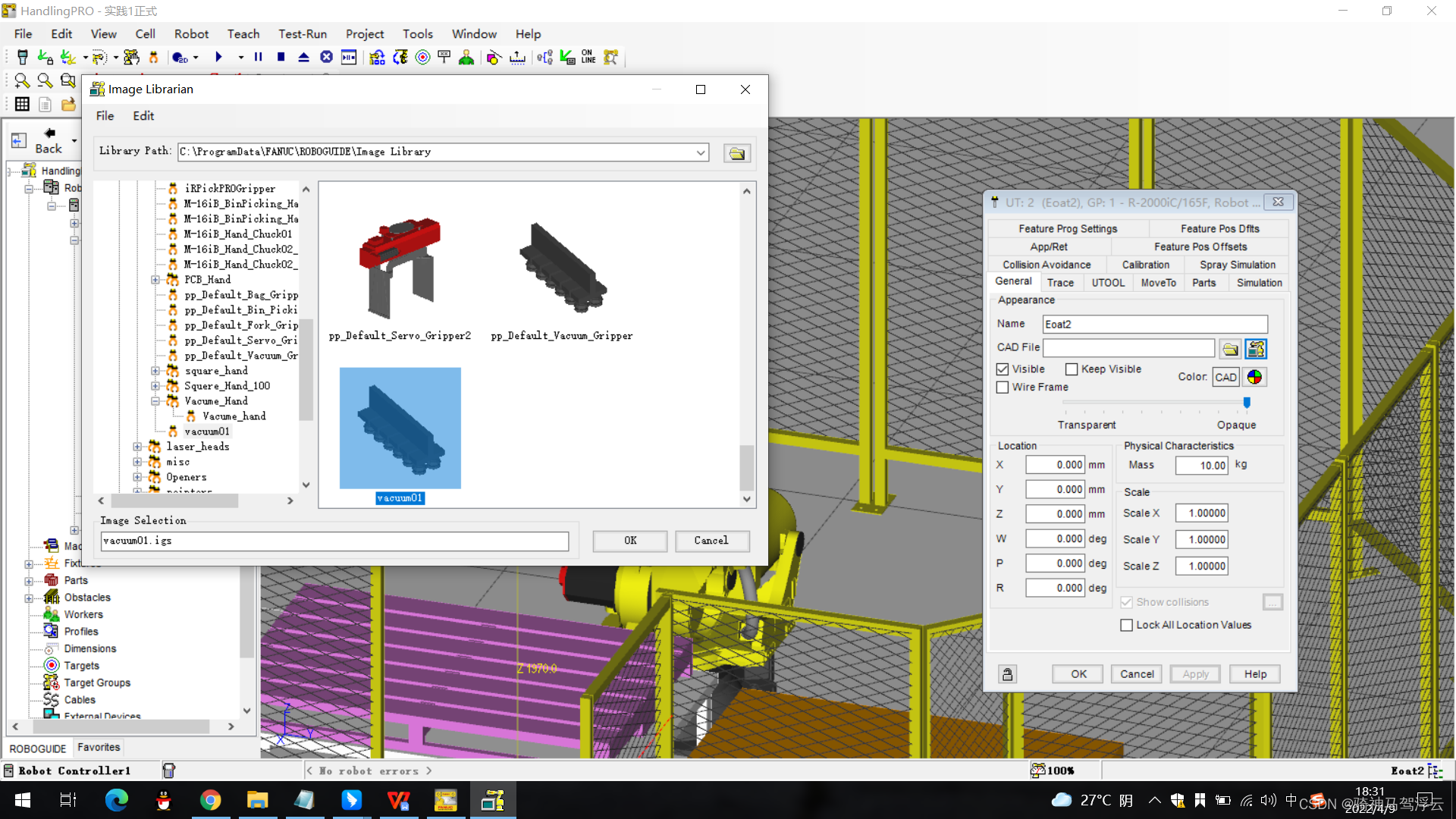
3.添加工业机器人抓手
添加夹具:
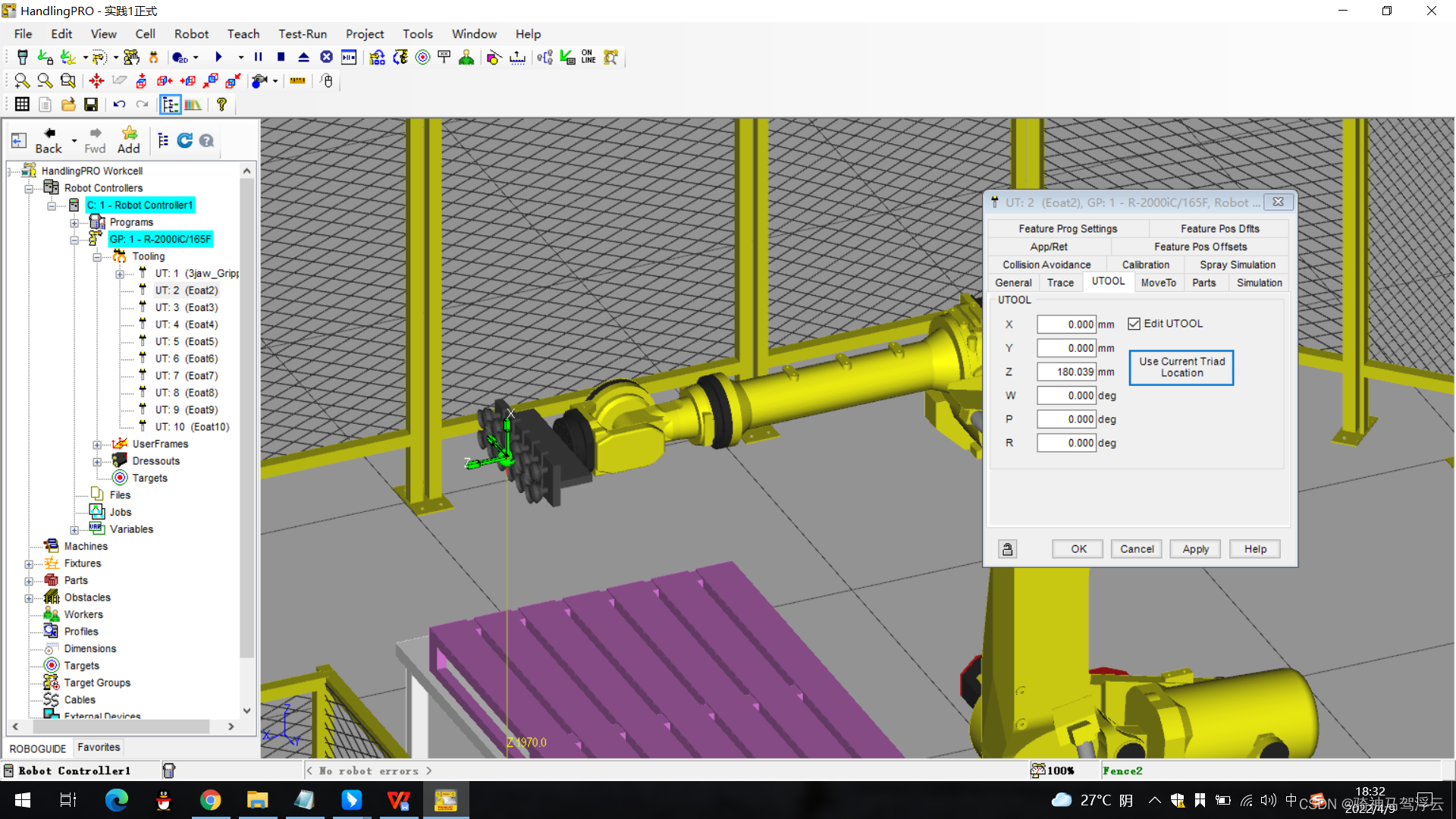
调整夹具姿态并设置TCP:
4、示教编程与调试
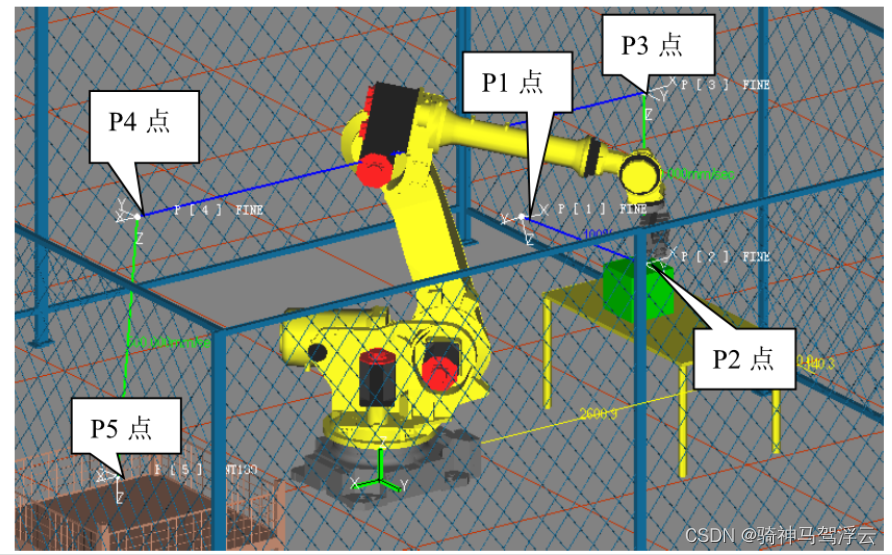
参照如下图搬运示教思路,设计home点、示教抓取位置及其上方位置、示教放置位置及其上方位置,并给出本实践中涉及的示教点位示意图。
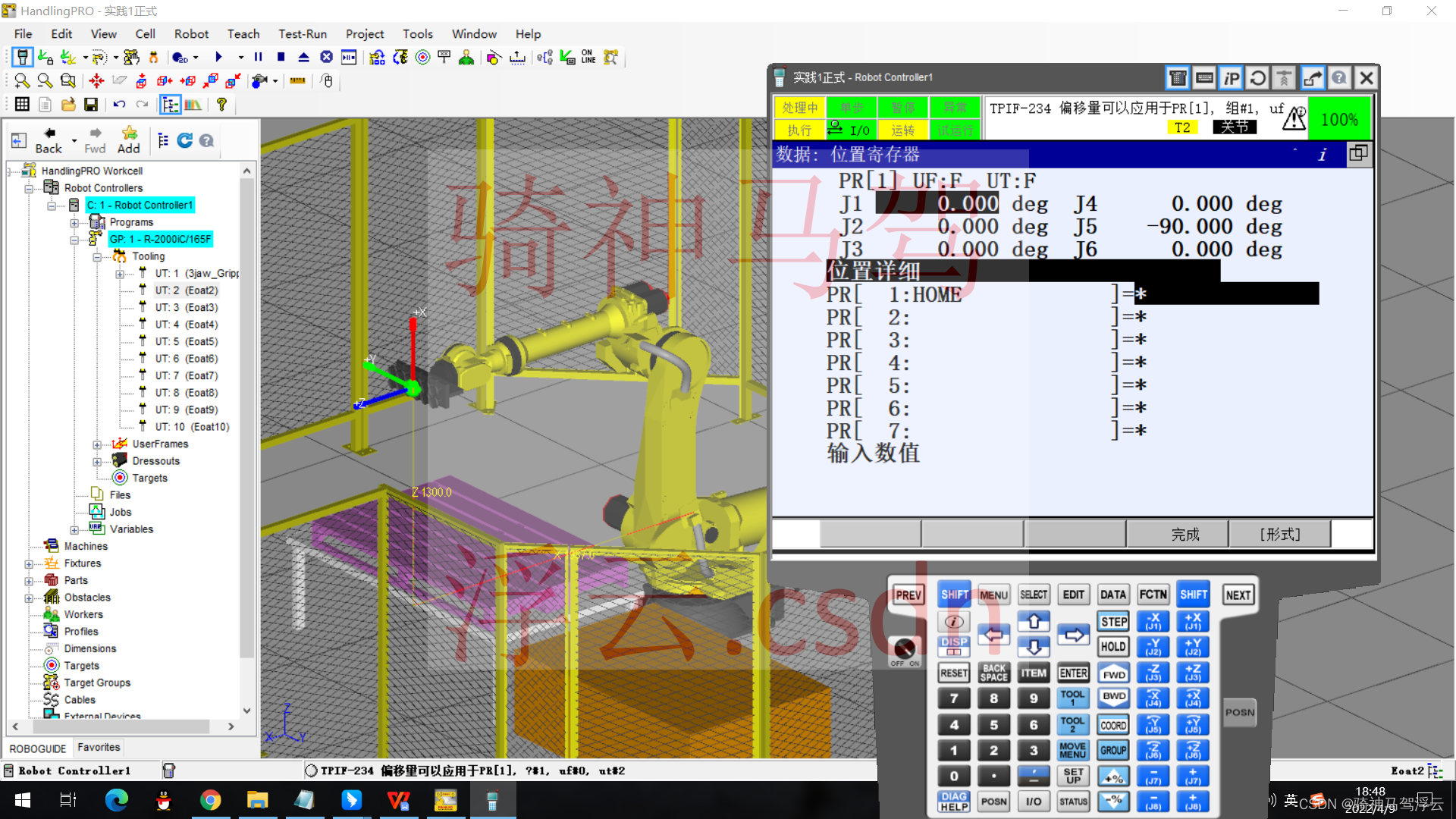
在寄存器中设置HOME点:
布置好工件:
将工件添加到夹具上并调整好姿态:
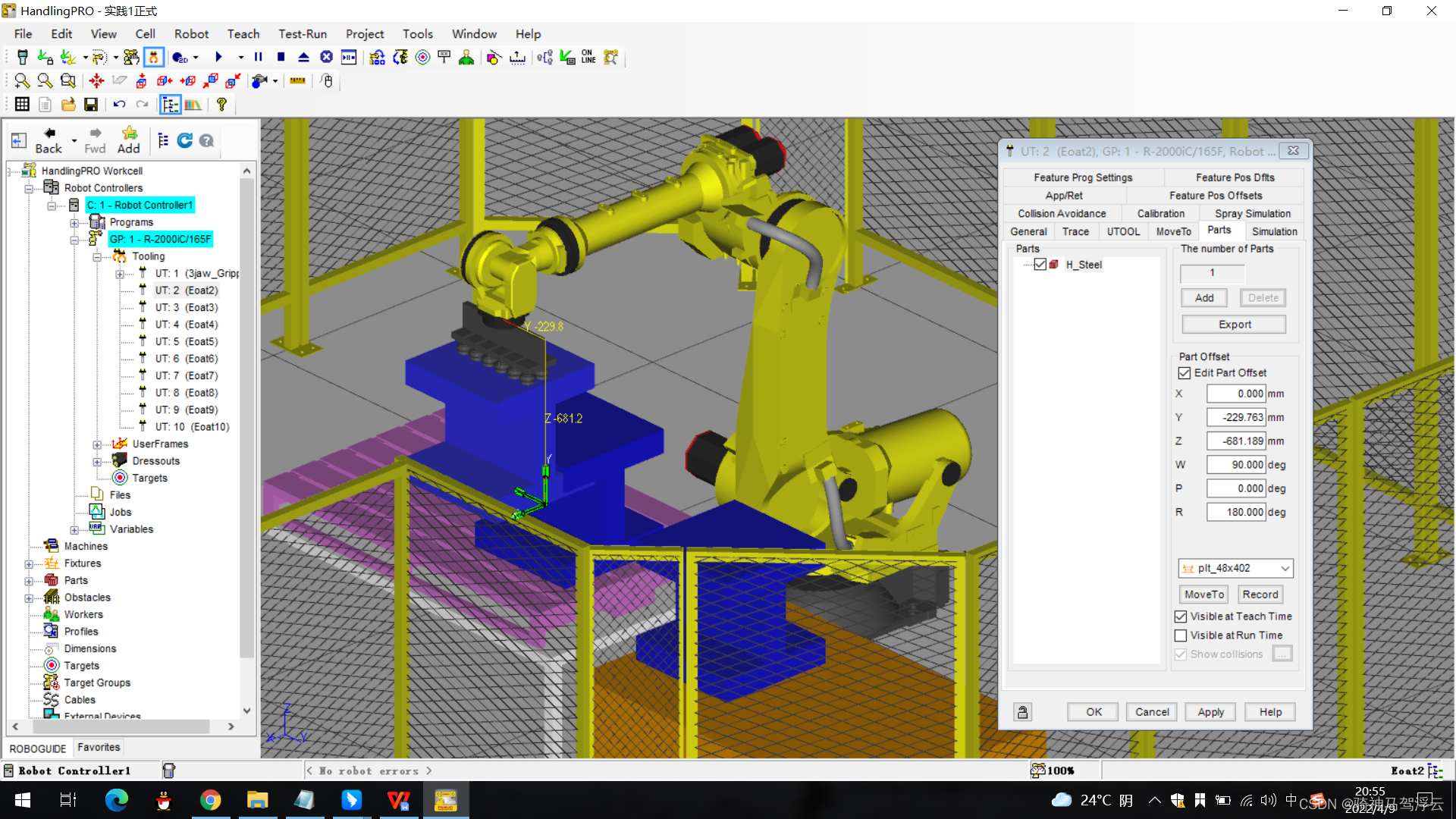
通过move to指令检测设置是否正常:
通过add命令将剩余工件摆放好:
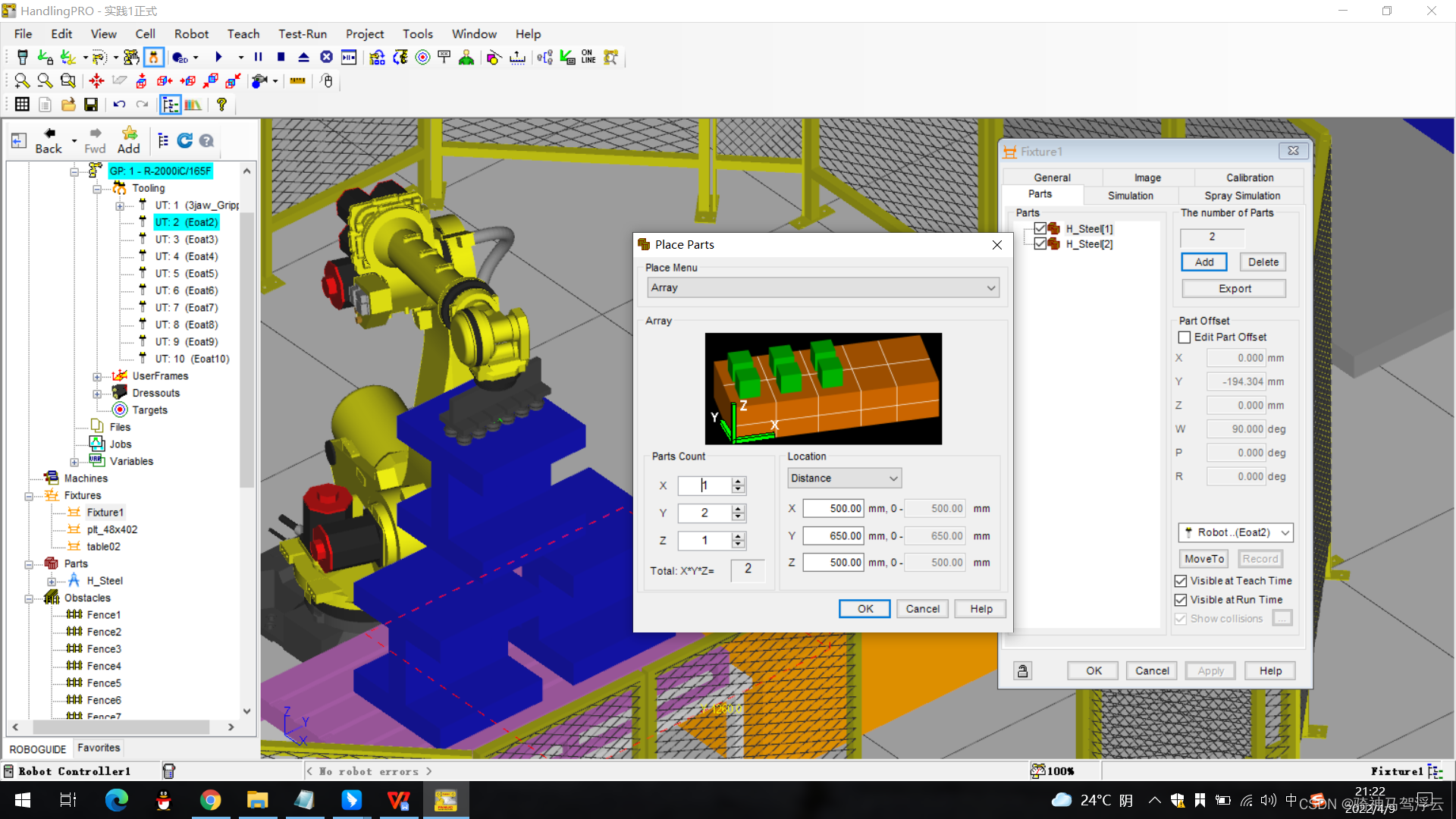
并调整好工件姿态:

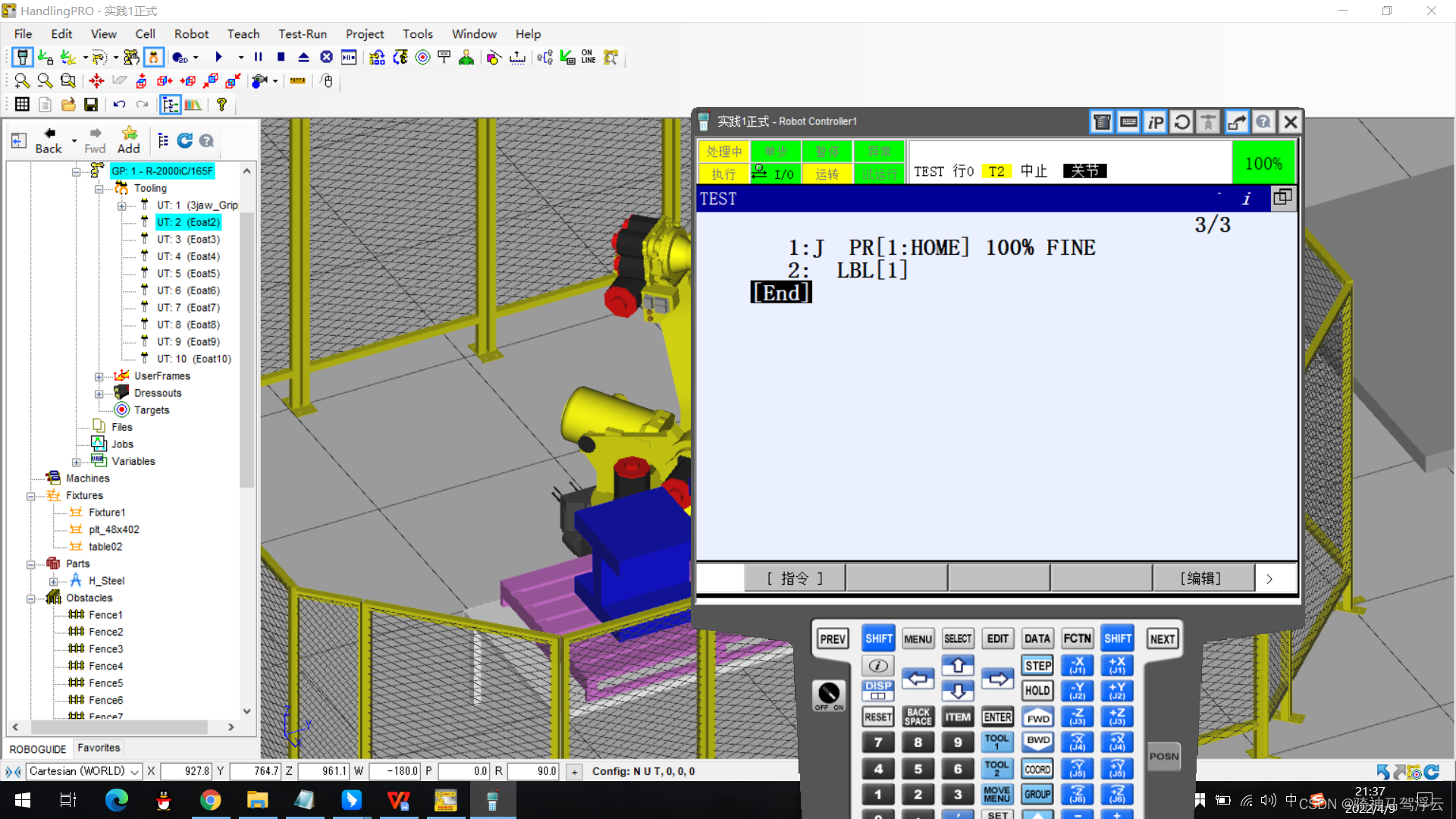
开始编程:先修改标准:
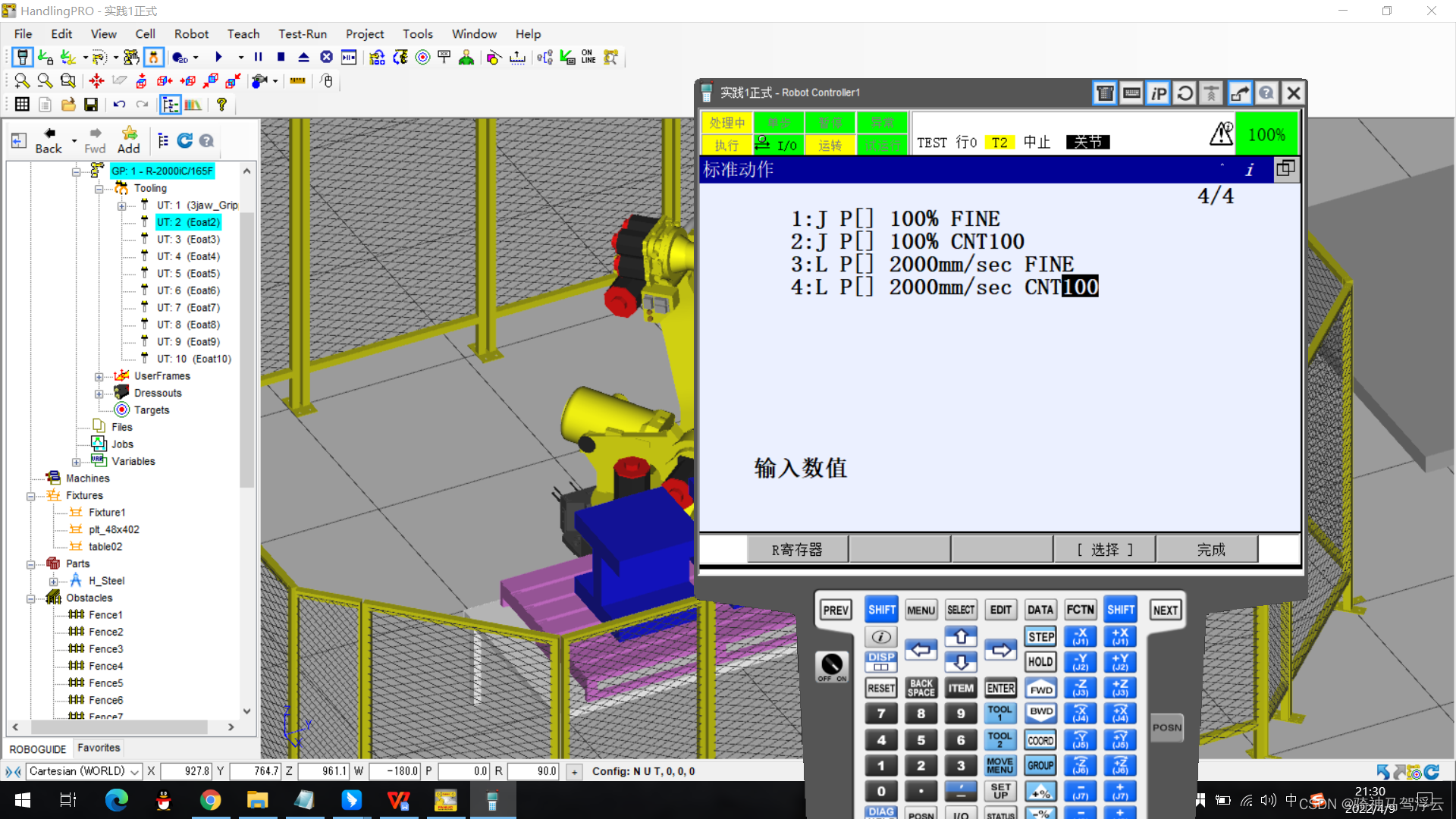
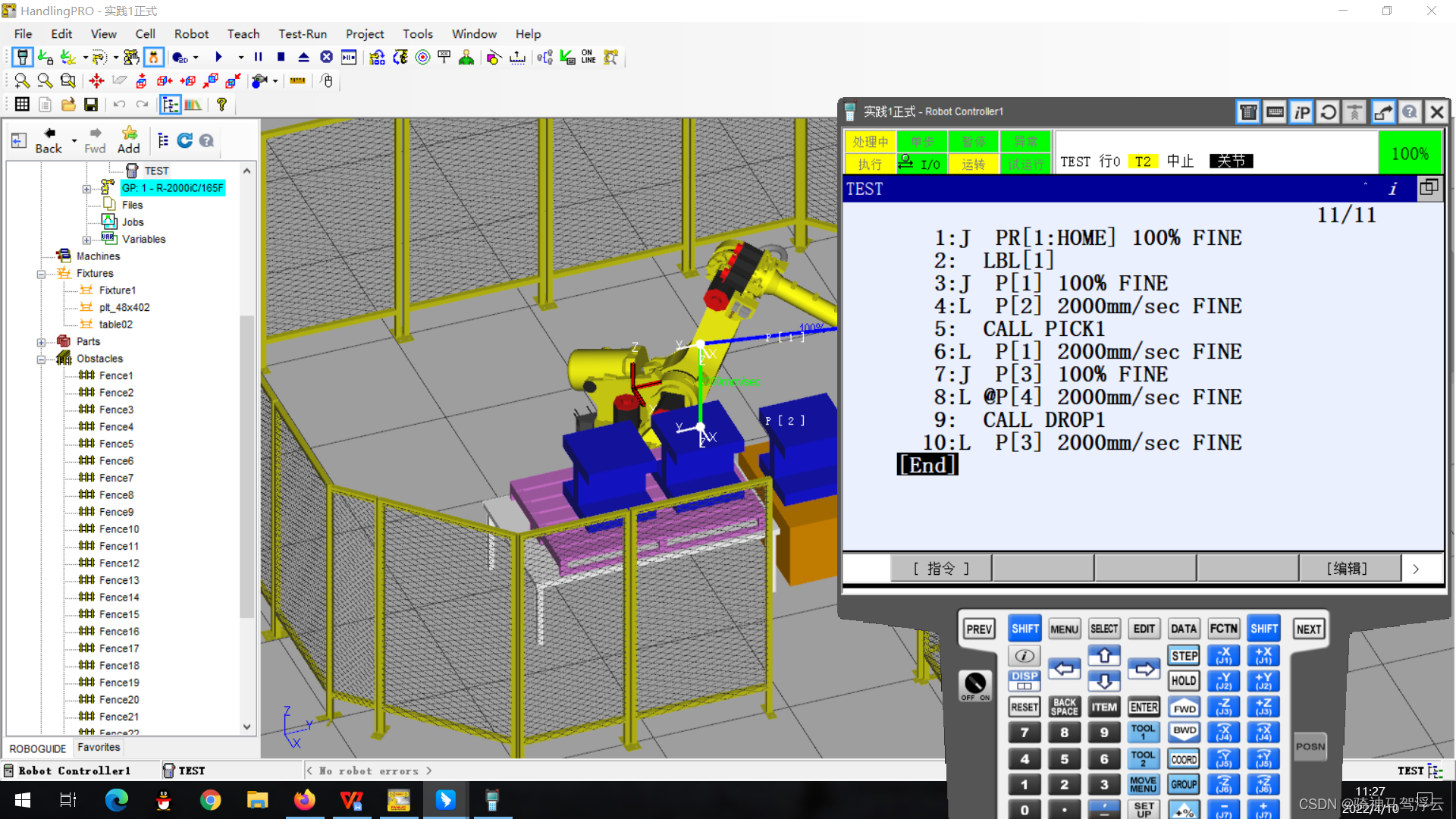
示教器输入以下指令:
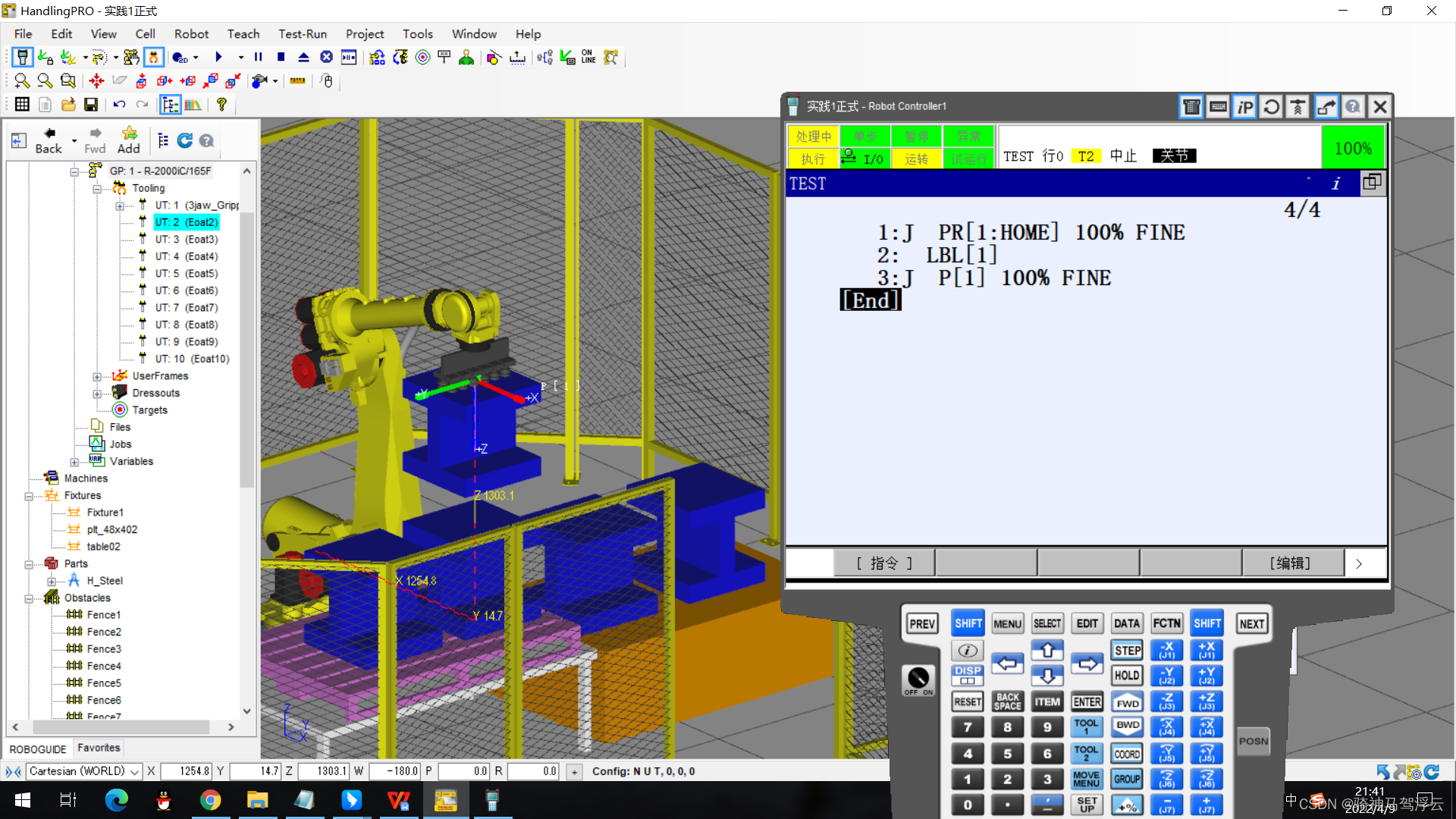
示教第一个点P1:
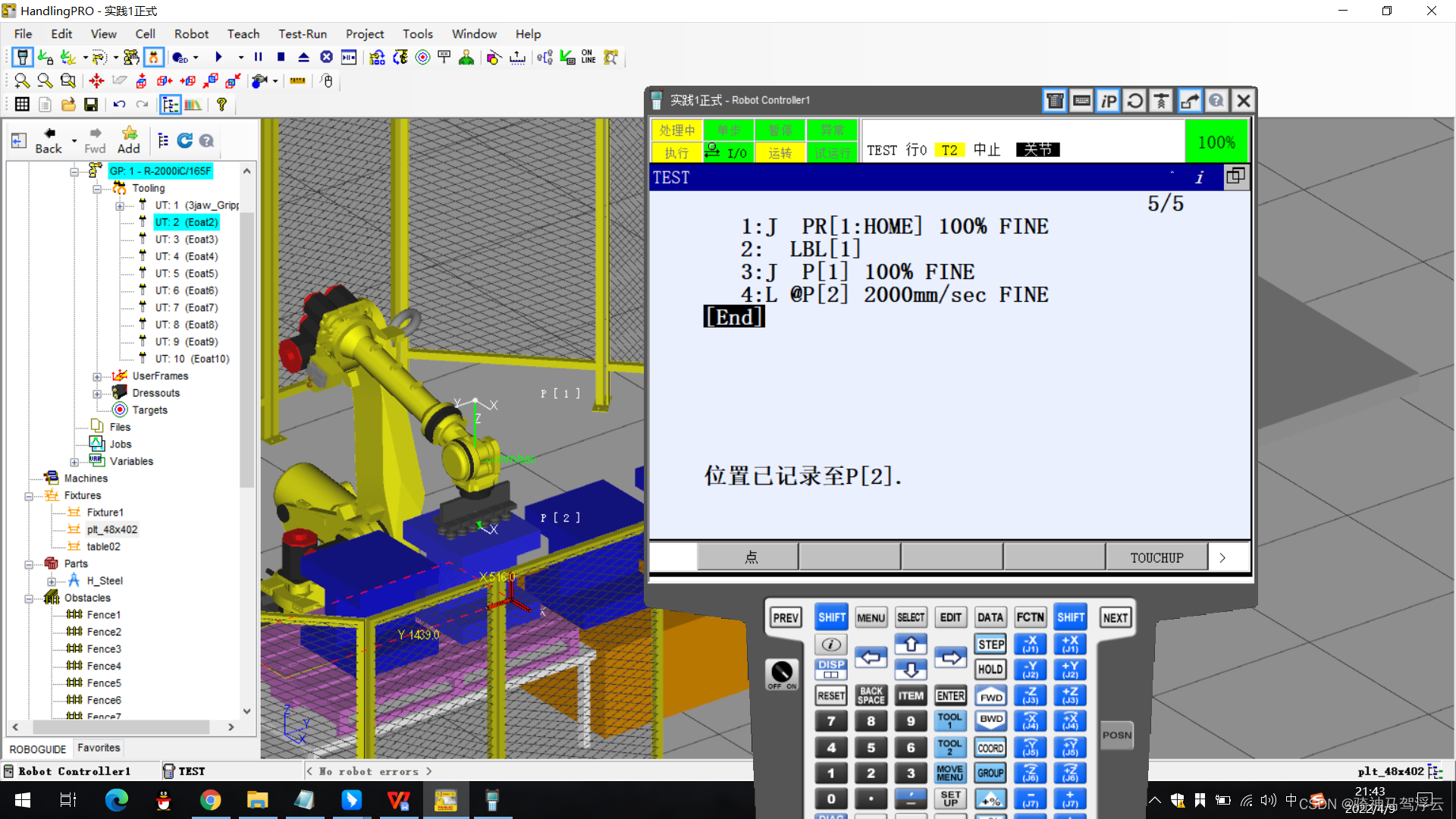
示教第二个点P2:
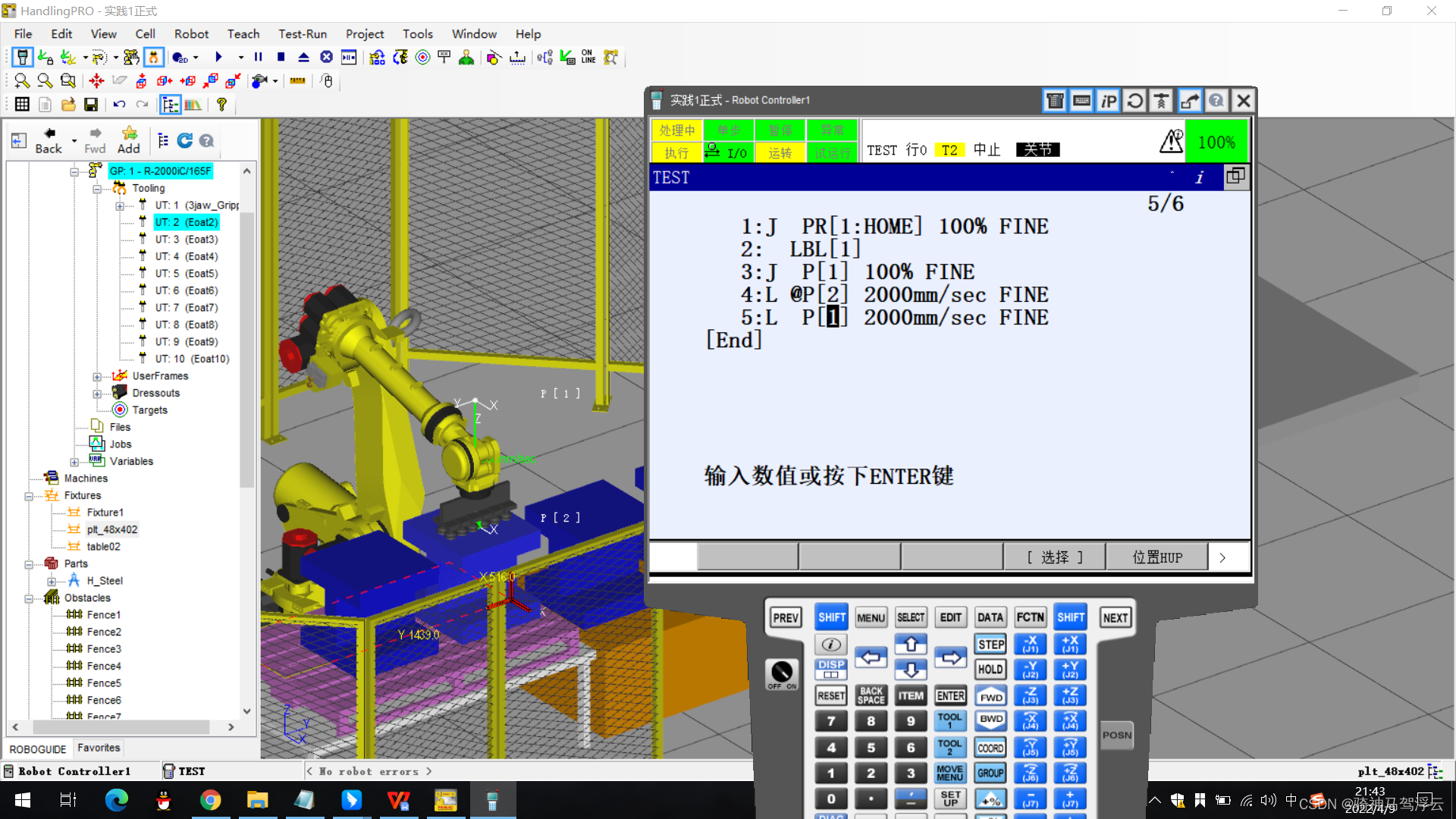
设置抬枪动作:
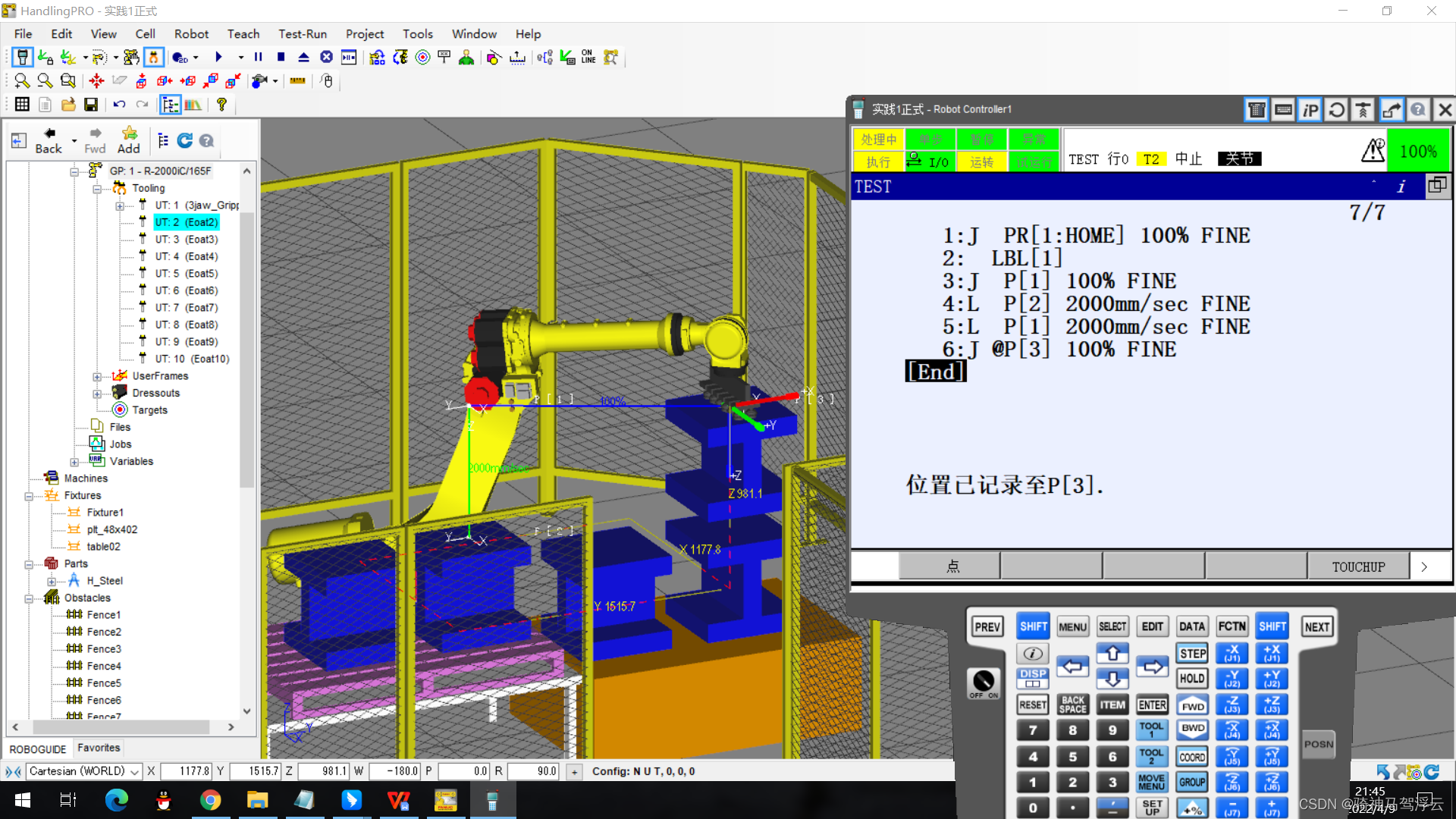
示教第三个点P3:
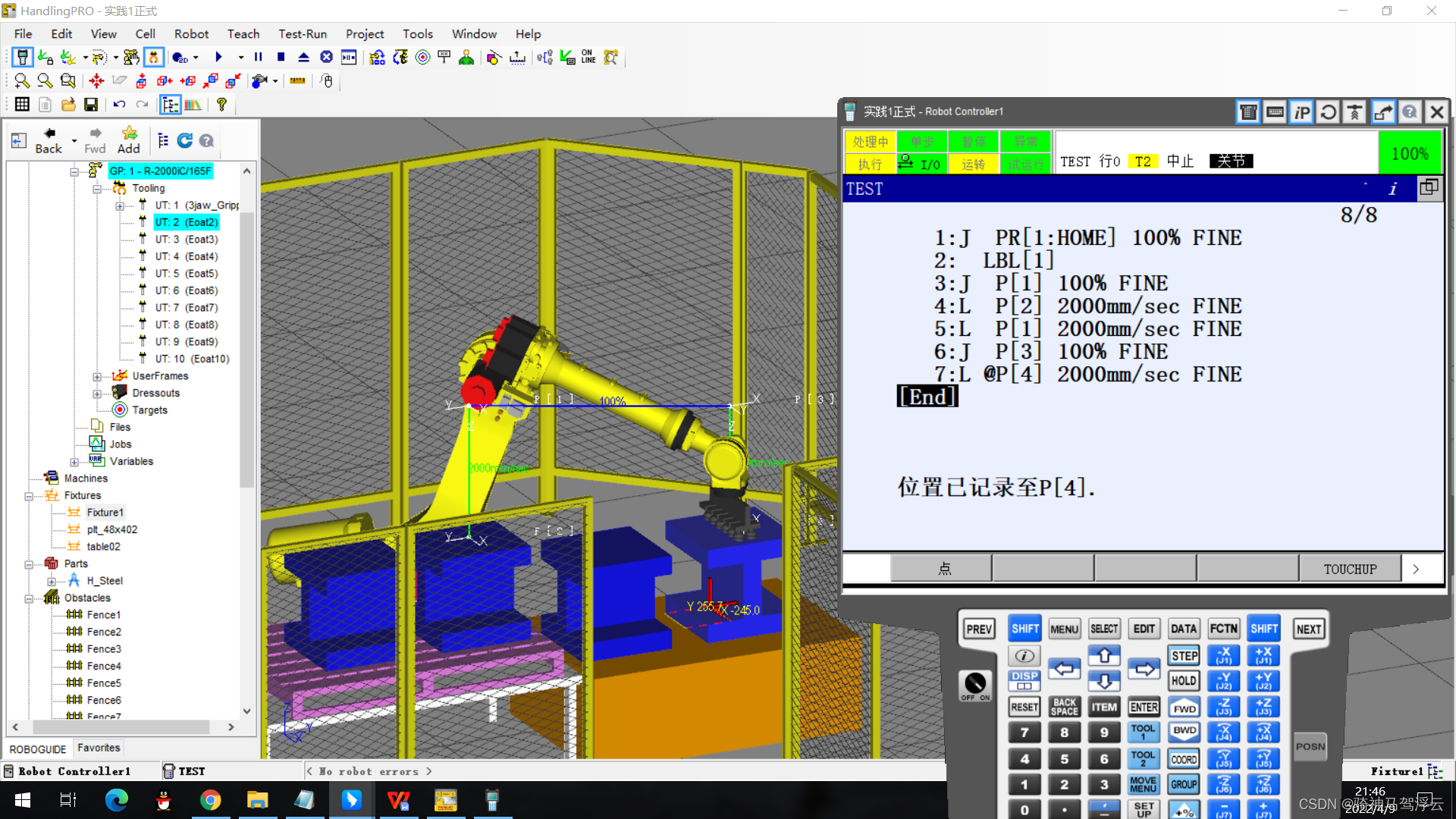
示教第四个点P4:
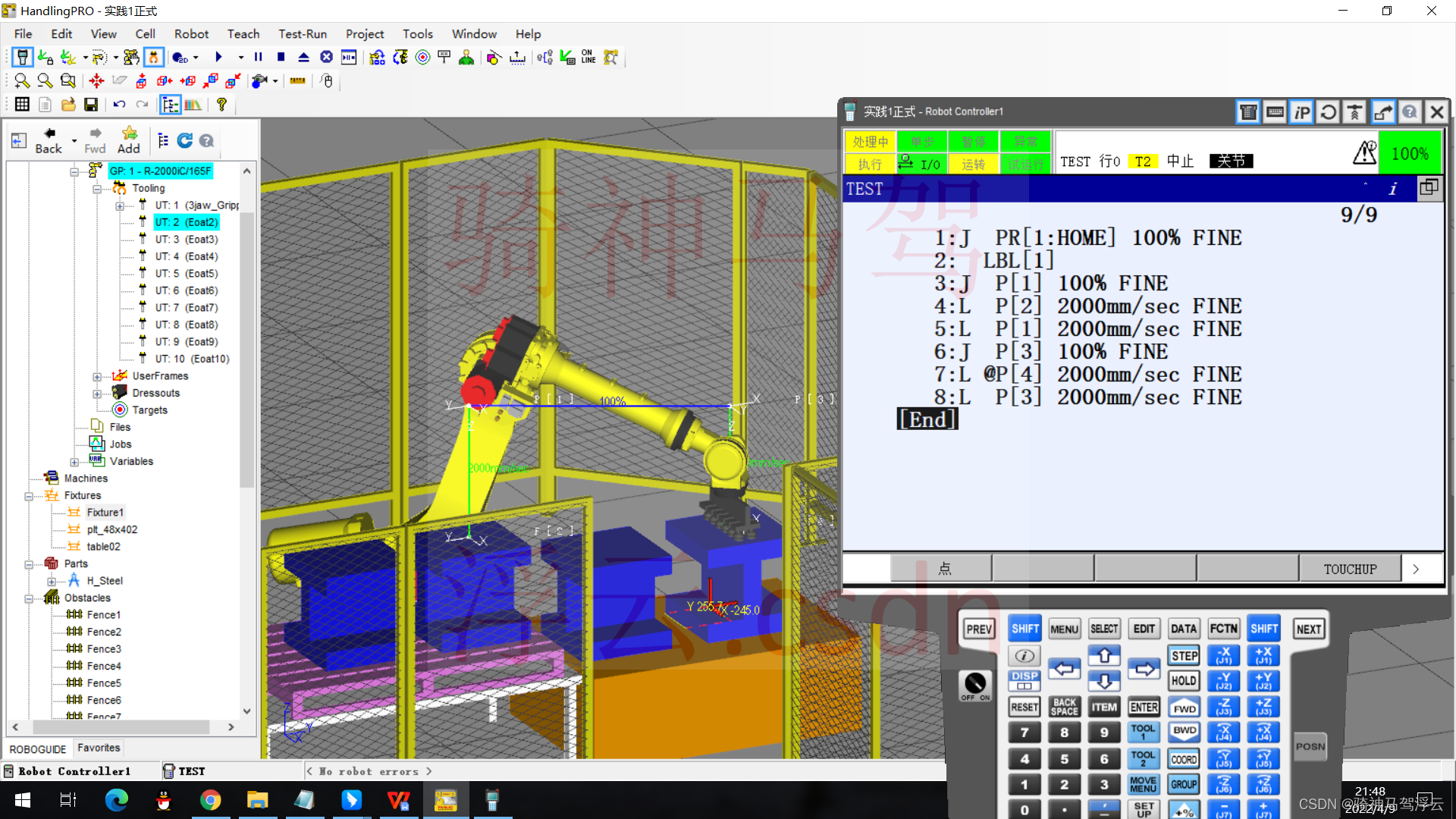
设置抬枪动作:
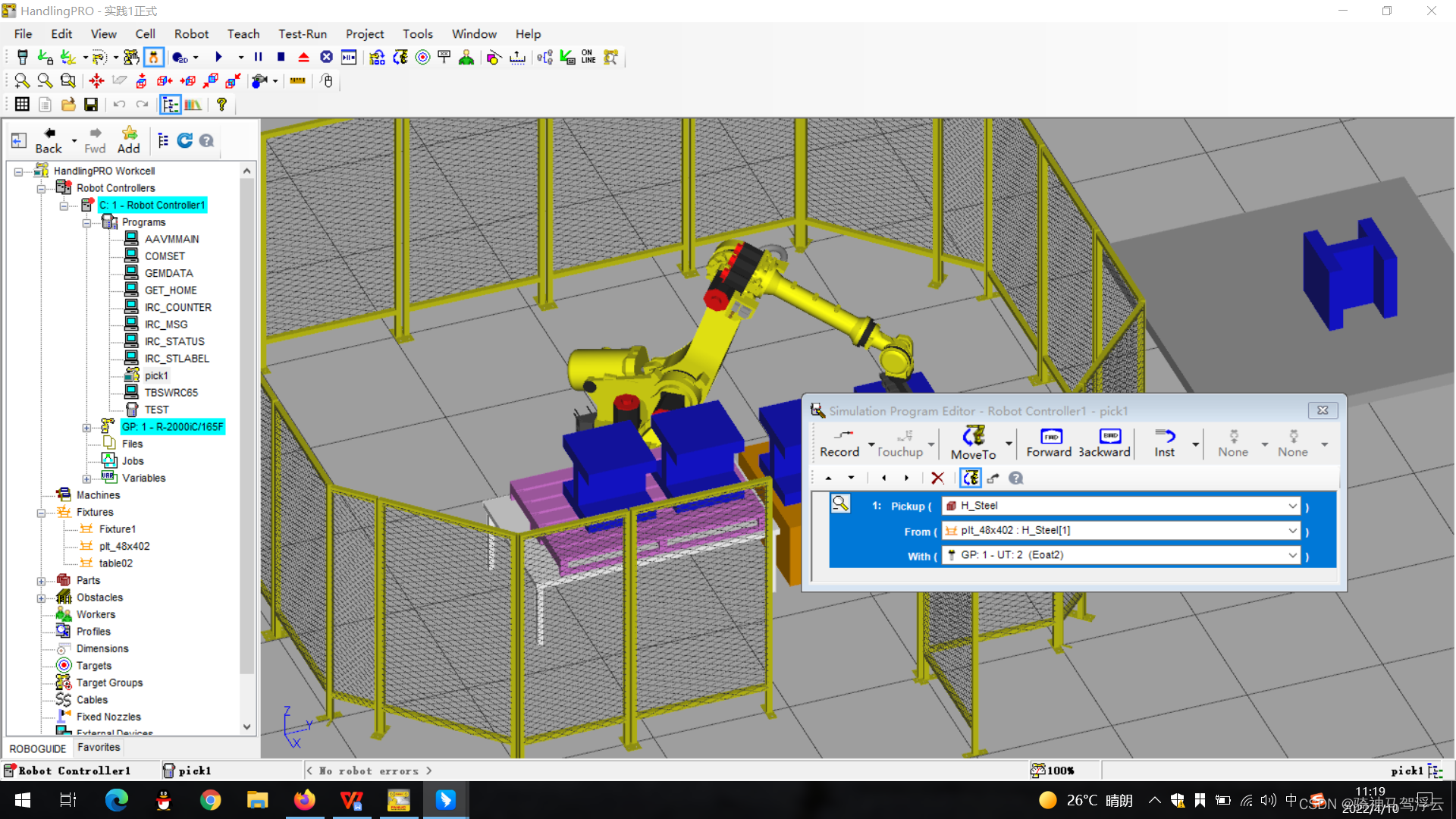
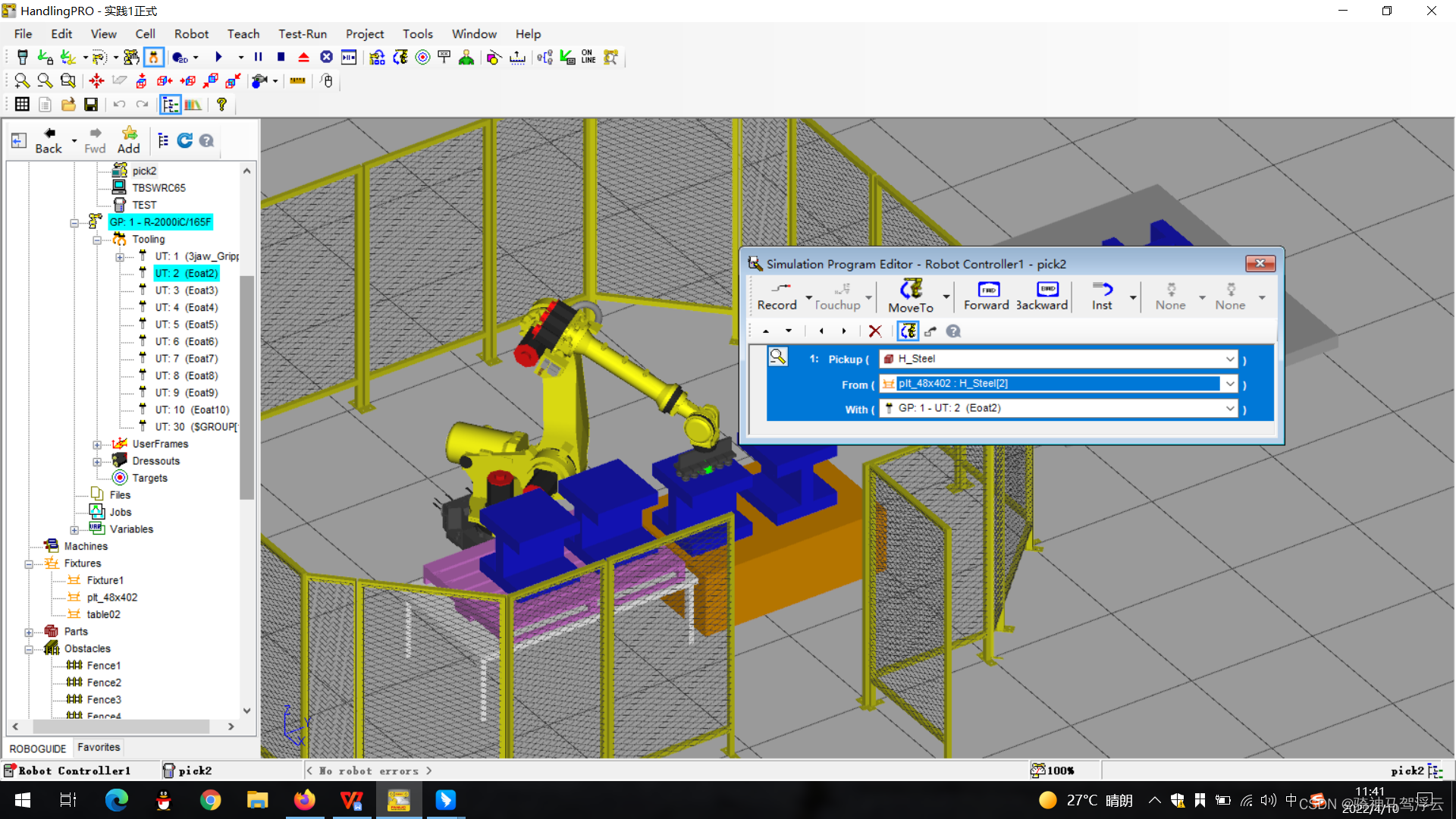
添加抓取动作函数:
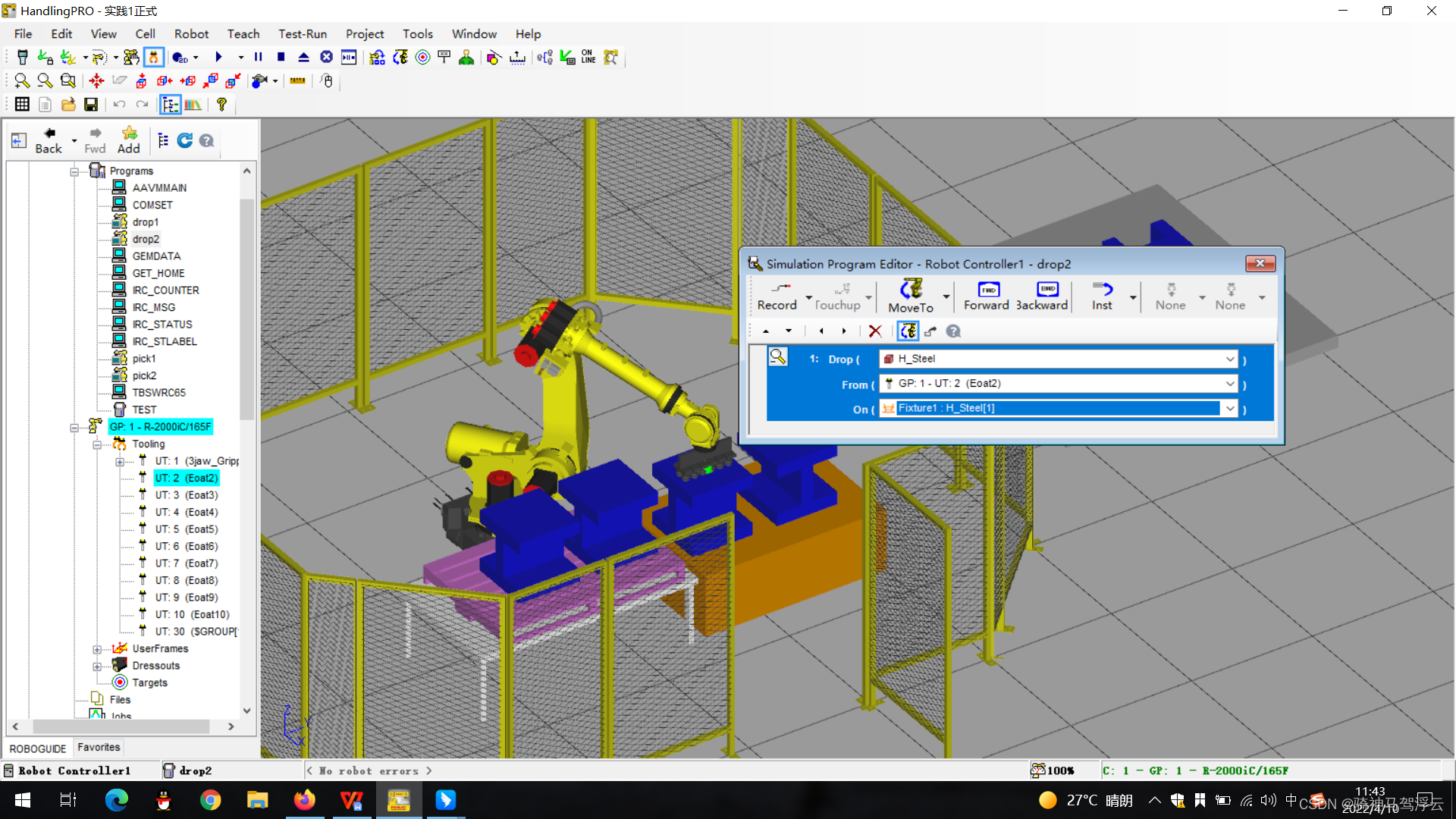
添加释放动作函数:
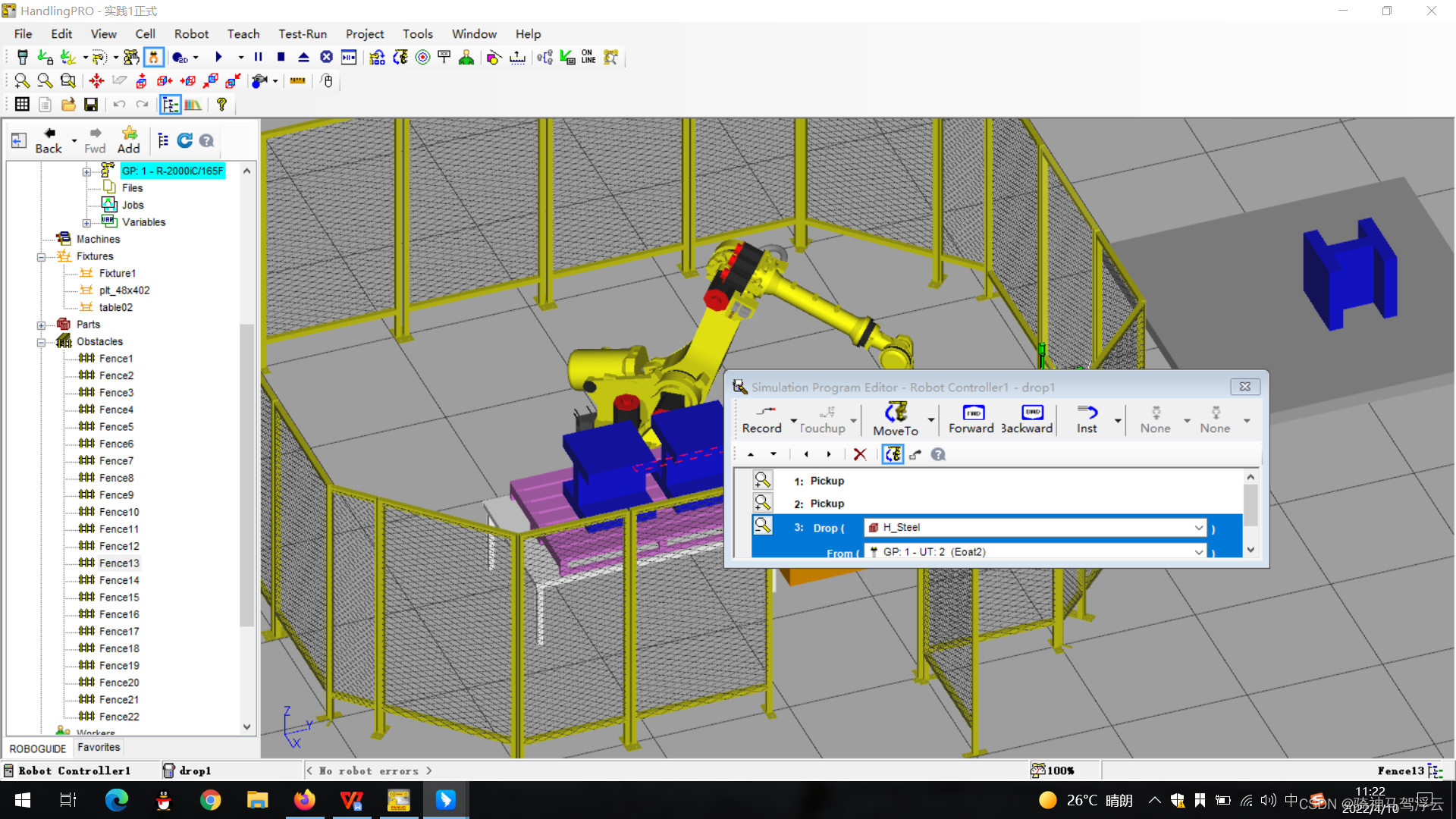
将抓取、释放动作插入程序中:
示教第五个点P5:

示教第六个点P6:
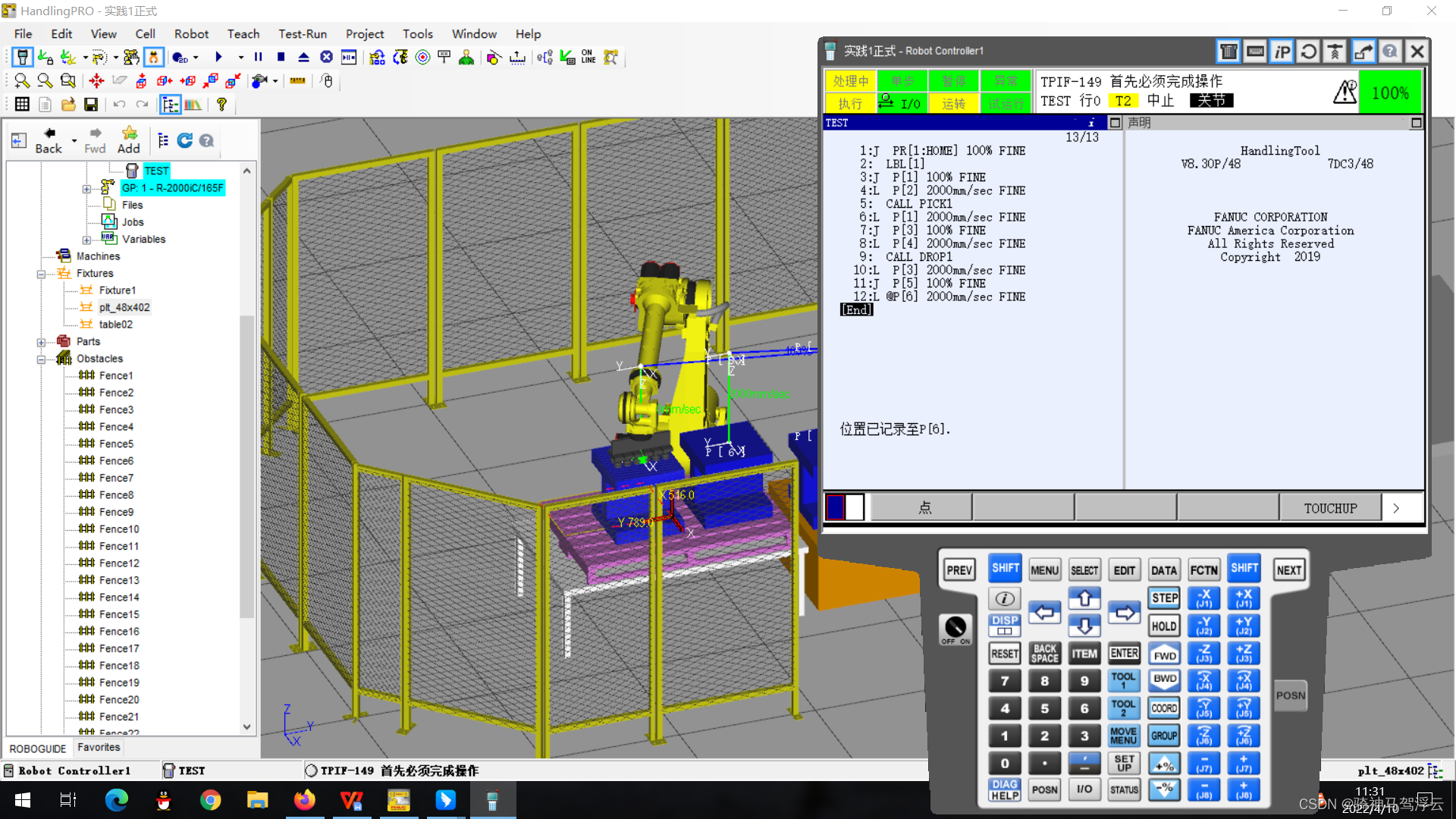
设置抬枪动作:

示教第七个点P7:
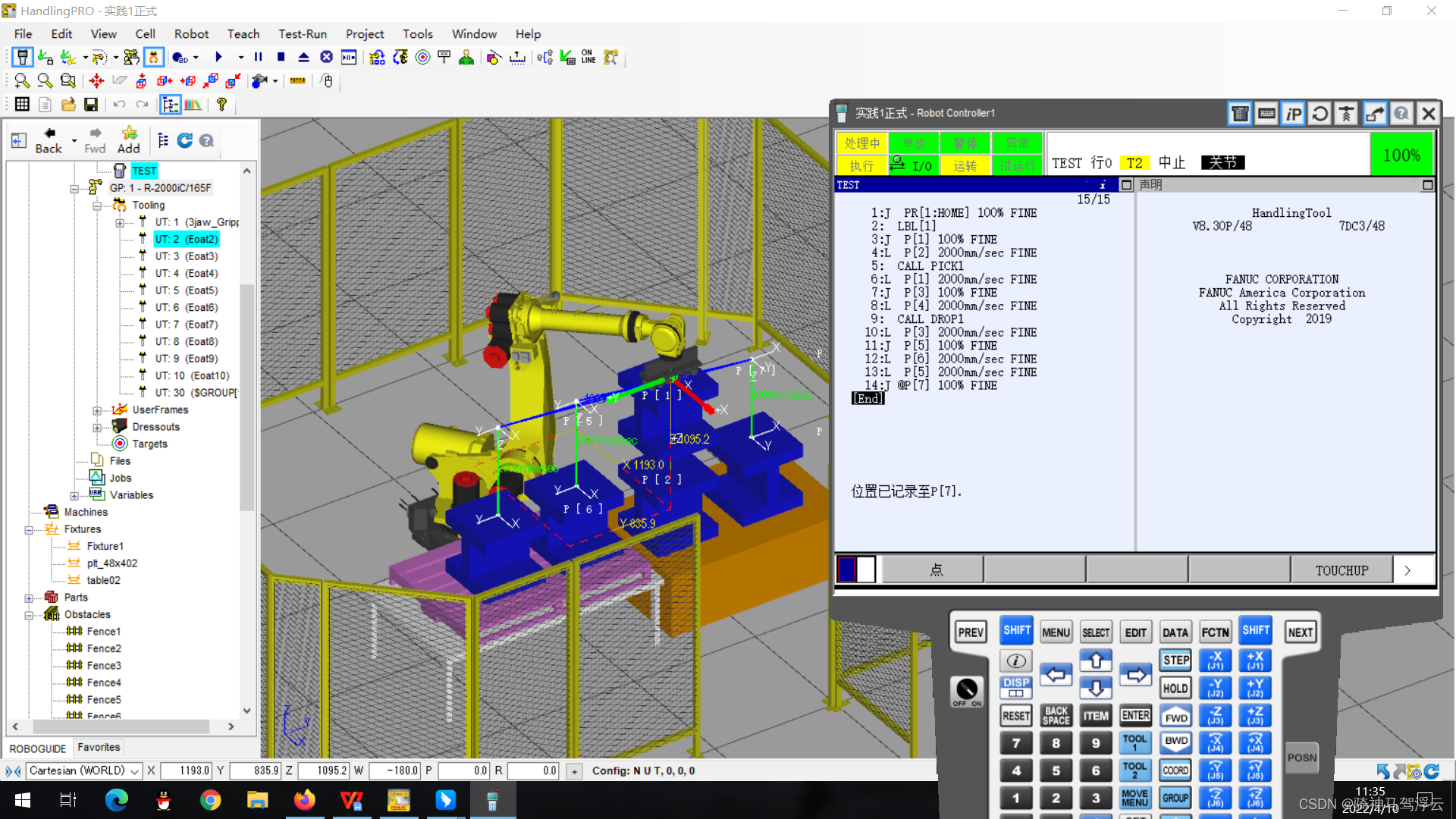
示教第八个点P8:

设置抬枪动作:
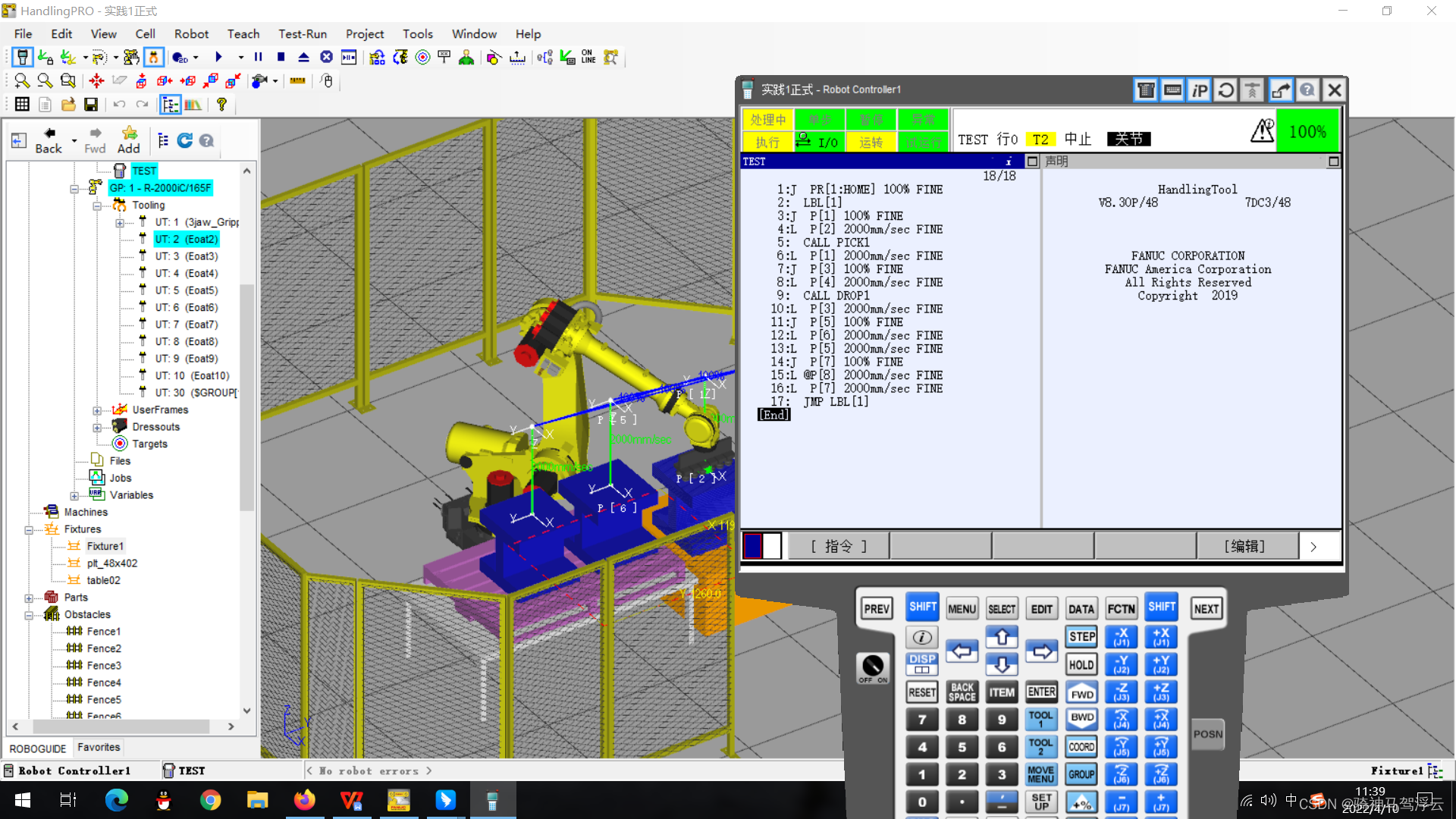
完成循环:
设置剩余抓取、释放动作:
插入剩余抓取、释放动作:
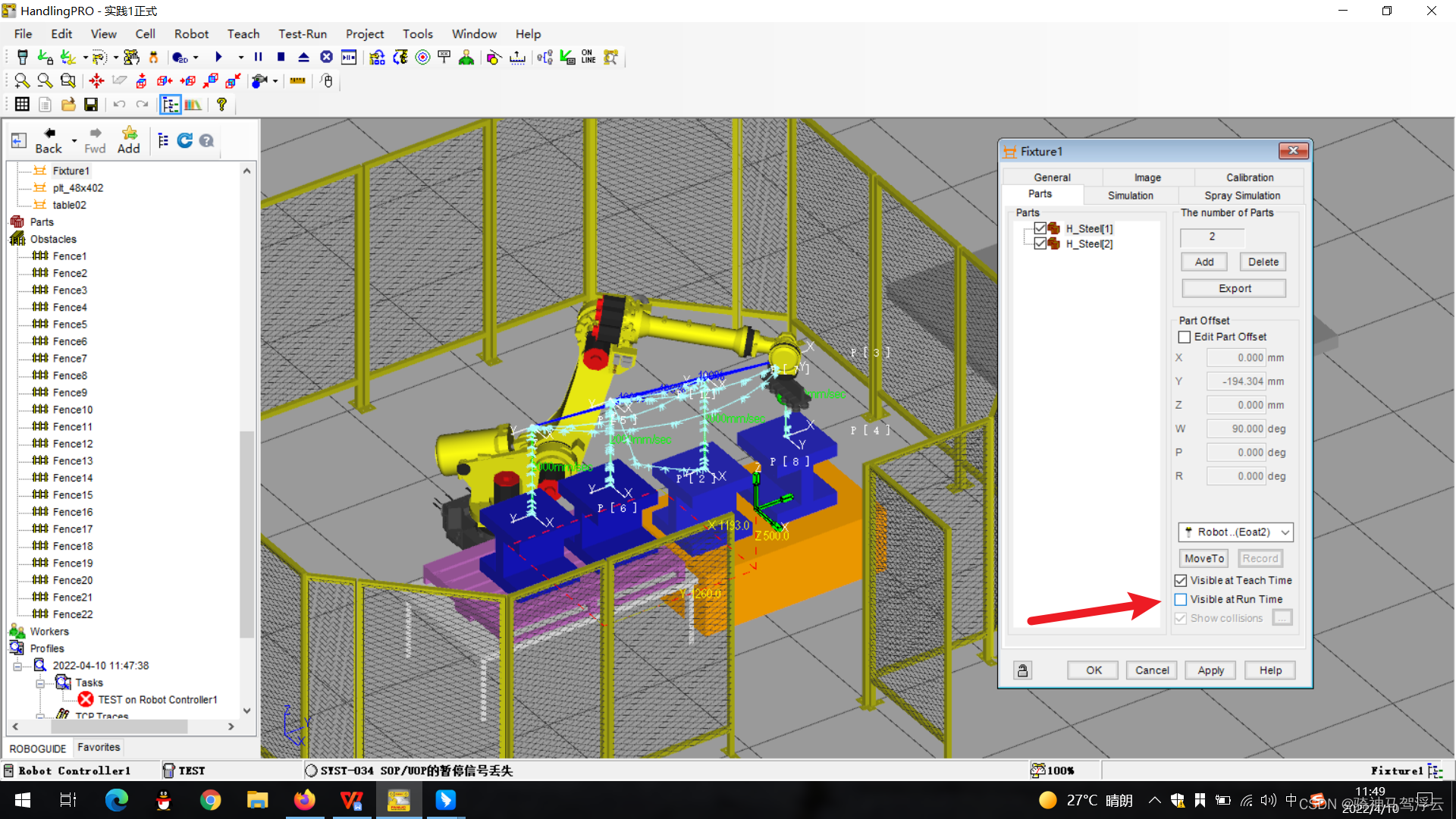
设置工作台循环工作:(取消初始可见)
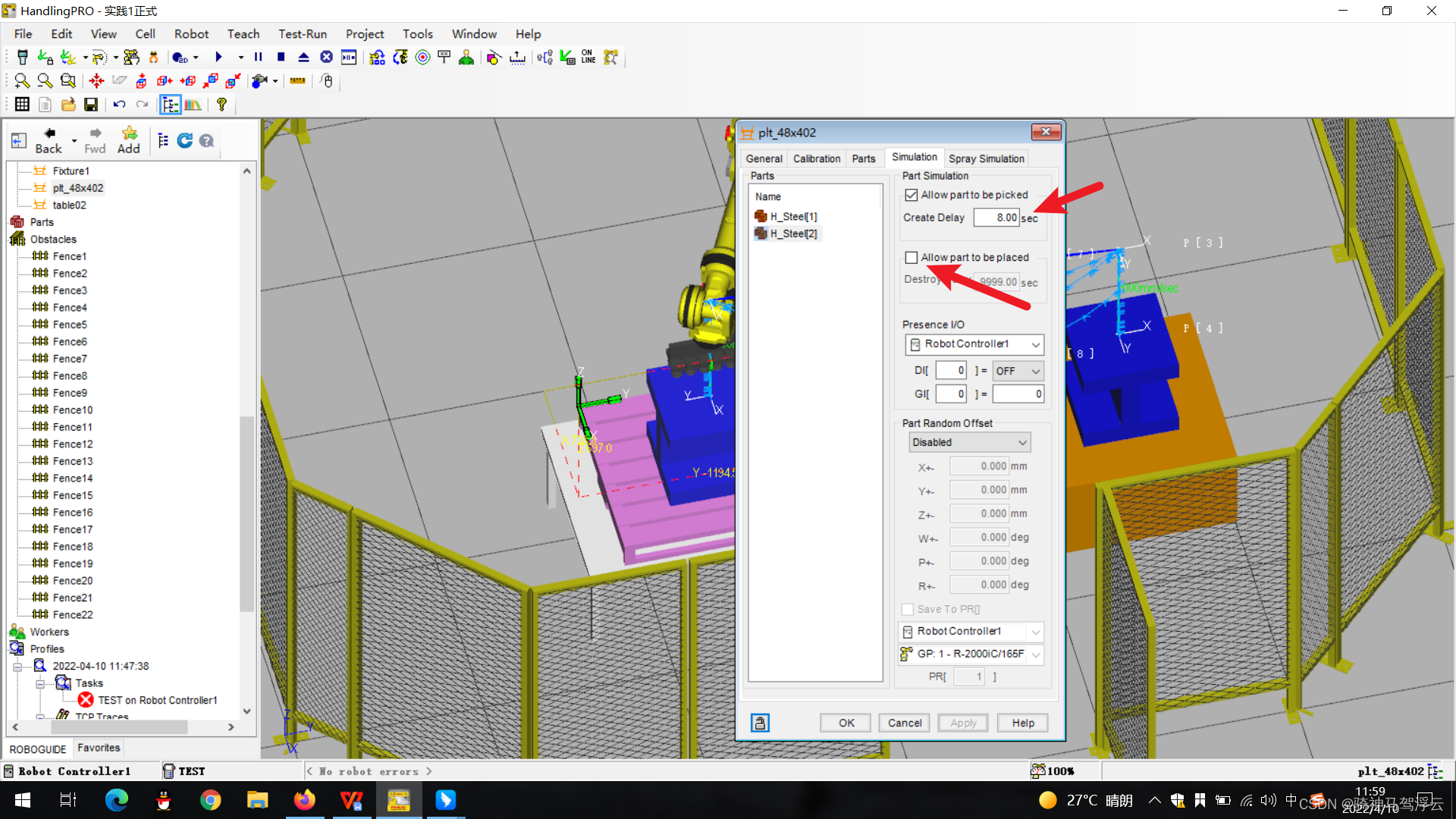
设置工件自动生成时间:
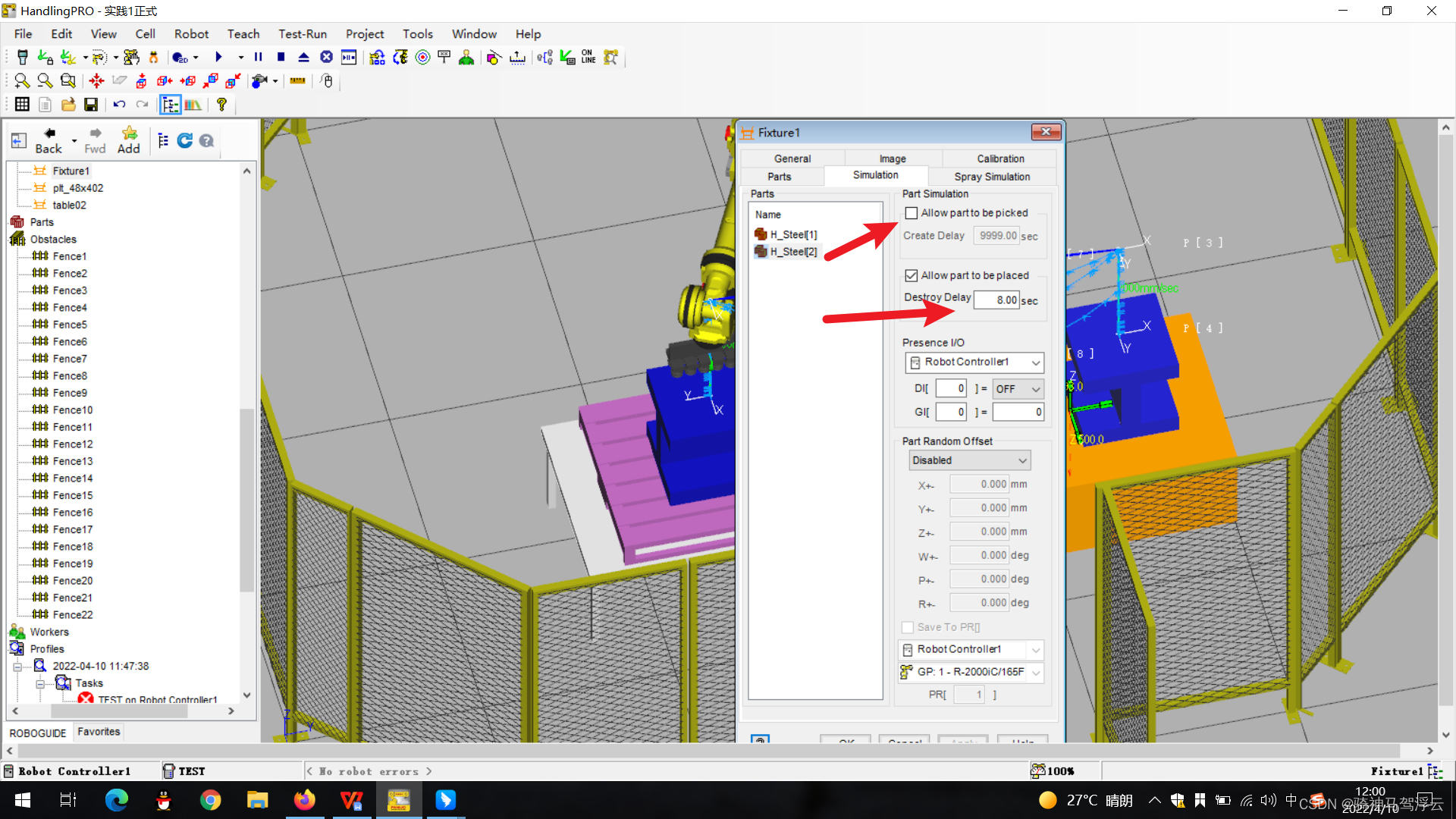
设置工件自动消失时间:
四、结果分析
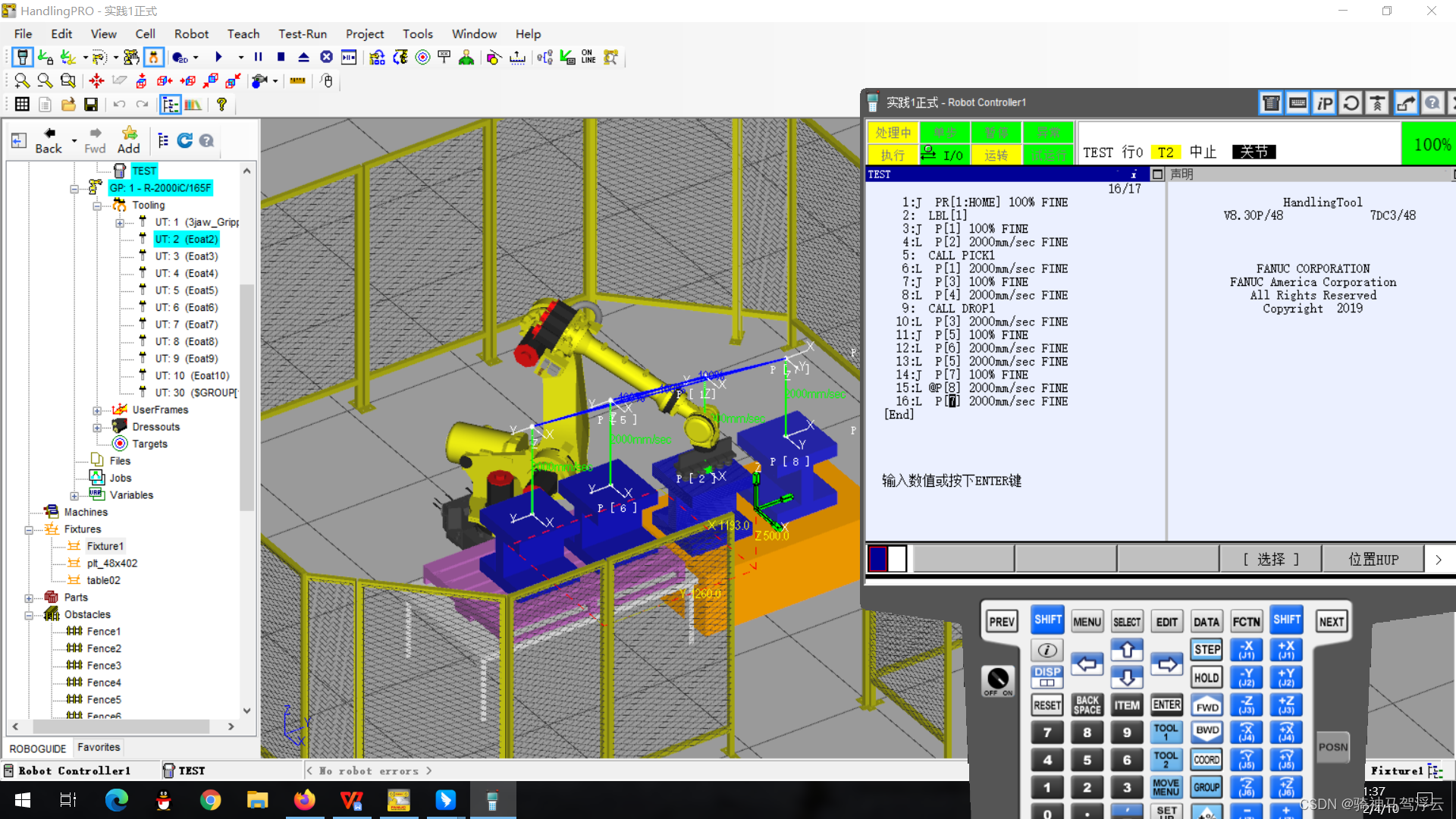
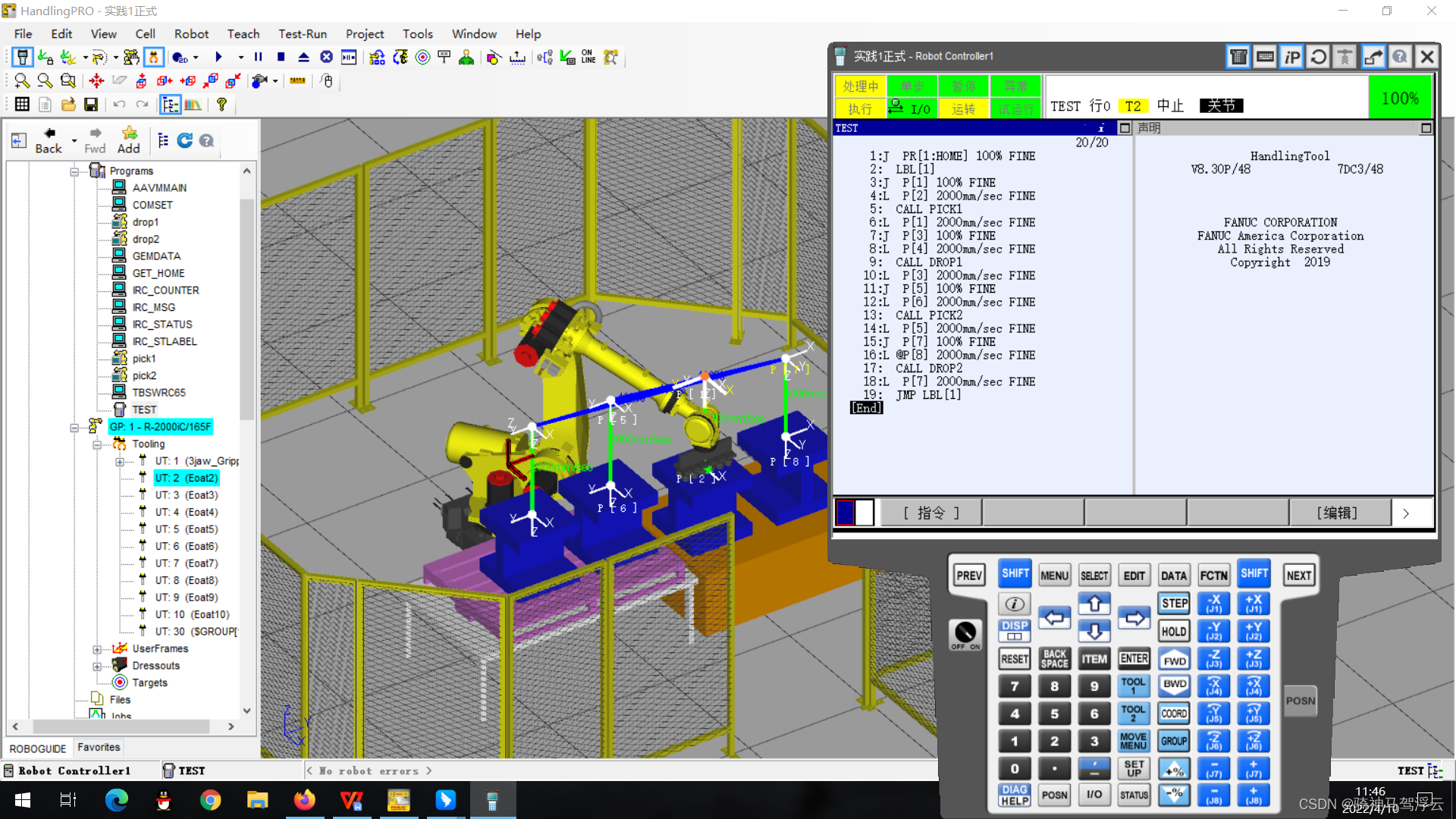
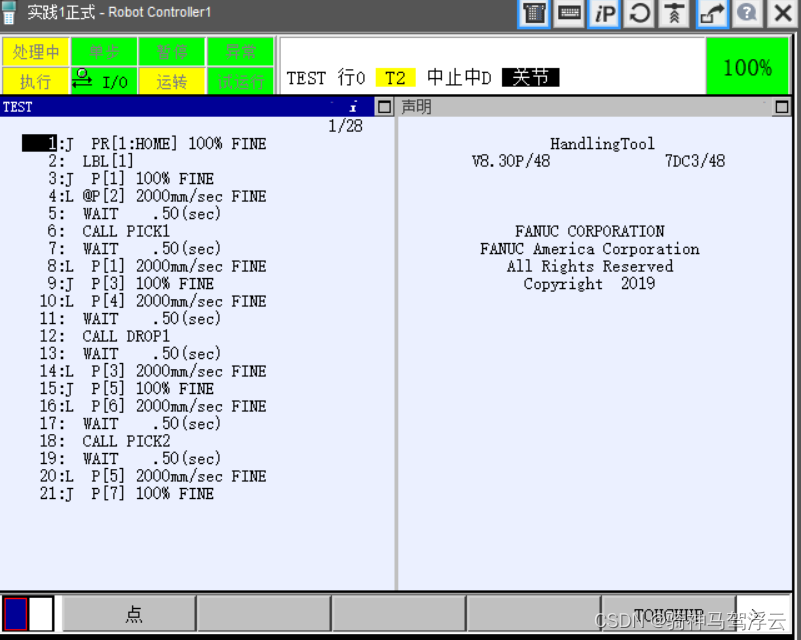
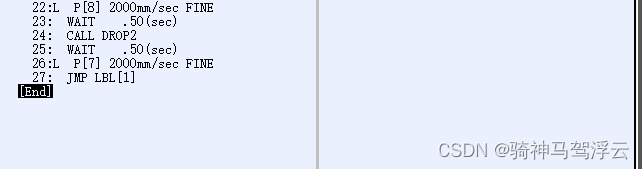
1、仿真代码如下:
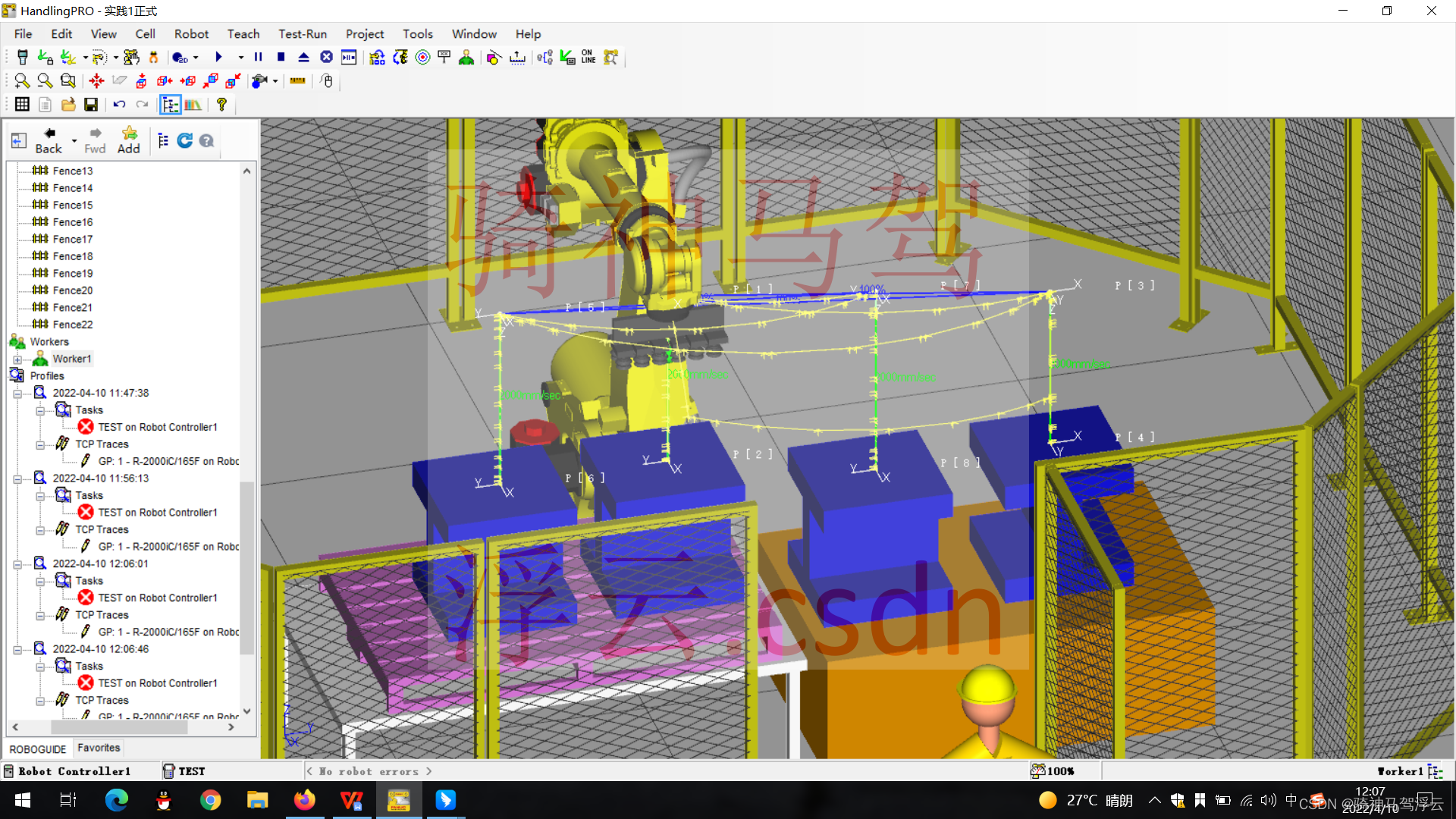
2.仿真结果(带TCP的轨迹截图)如下:

















 759
759











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











