








博客已搬家,欢迎访问新居:http://lukeyalvin.site,主要涉及SLAM相关方向,目前知识积累尚浅,多多指教!
第二节 控制系统的数学模型——传递函数
了解数学模型的概念,自动控制原理都包含哪些数学模型,怎样将系统转换为数学模型
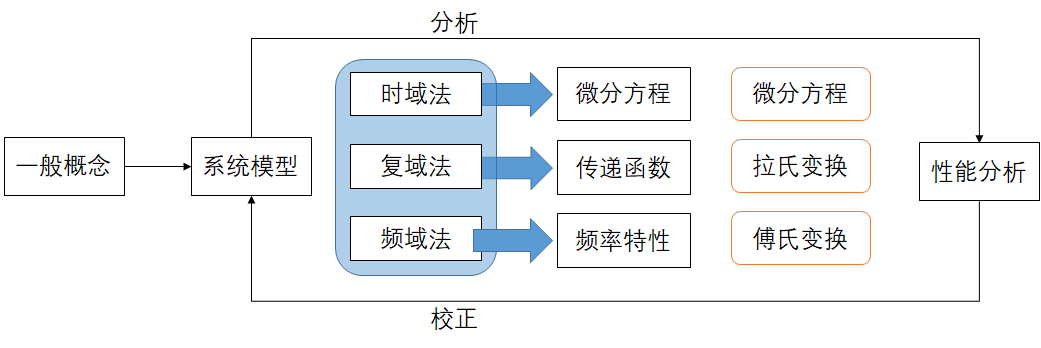
什么是控制系统的数学模型?控制系统的模型有哪些种?
数学模型是用来描述系统因果关系的数学表达式。有微分方程、传递函数、结构框图、信号流图、频率特性、差分方程、状态方程、传递矩阵等表达形式。
什么是控制系统的数学模型?控制系统的模型有哪些种?
数学模型是用来描述系统因果关系的数学表达式。有微分方程、传递函数、结构框图、信号流图、频率特性、差分方程、状态方程、传递矩阵等表达形式。
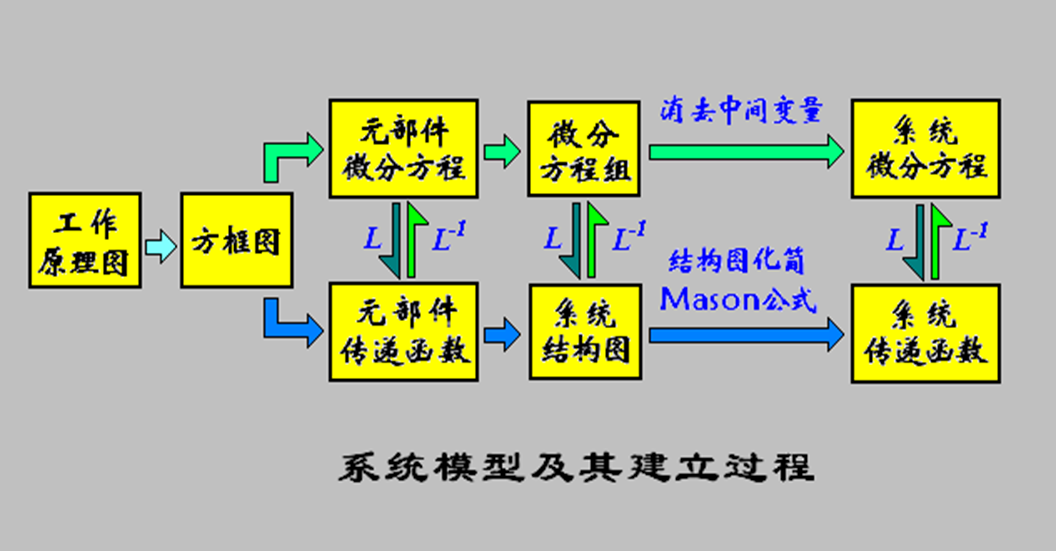
系统数学模型建立的过程:
微分方程
RLC电路微分方程的建立(二阶)
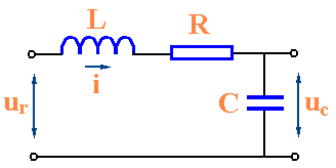
u r ( t ) = L d i ( t ) d t + R i ( t ) + u c ( t ) i ( t ) = C d u c ( t ) d t u r ( t ) = L C d 2 u c ( t ) d t 2 + R C d u c ( t ) d t + u c ( t ) u_r(t)=L\frac{d_i(t)}{dt}+R_i(t)+u_c(t)\\ i(t)=C\frac{du_c(t)}{dt}\\ u_r(t)=LC\frac{d^2u_c(t)}{dt^2}+RC\frac{du_c(t)}{dt}+u_c(t) ur(t)=Ldtdi(t)+Ri(t)+uc(t)i(t)=Cdtduc(t)ur(t)=LCdt2d2uc(t)+RCdtduc(t)+</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5033
5033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











