







跨时钟域处理 & 亚稳态处理
1.概述
常见的跨时钟域信号处理方法都有哪些呢?有如下的三种:
(1)两级DFF同步器
(2)握手协议
(3)异步FIFO
.
.
2.一个简单的握手信号
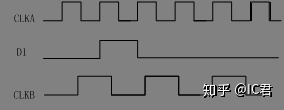
如果频率较高的时钟域A中的信号D1 要传到频率较低的时钟域B,但是D1只有一个时钟脉冲宽度(1T),clkb 就有几率采不到D1了,如图1。
因此只有当D1 在很长一段时间内为1或0,确保一定可以被clkb采样到,才能用两级DFF同步器处理。
如果信号D1 只有1T或几个T的脉宽,又需要传到时钟频率较低甚至或快或慢不确定的时钟域B,这种情况该怎么如何处理呢?
握手协议(handshake)异步信号处理是一种常见的异步信号处理方法。

使用握手信号“xreq”和“yack”,“系统x”将数据发送给“系统y”。下面是使用握手信号传输数据的例子。
-
发送器“系统x”将数据放在数据总线上并发出“xreq”(请求)信号,表示有效数据已经发到接收器“系统y”的数据总线上。 -
采用两级D触发器缓存,把“xreq”信号同步到接收器的时钟域“yclk”上,得到“yreq2”信号,当采样到yreq2有效后,将数据锁存到系统y的总线上,同时接收器发出“yack”信号(相应信号)。
3) 发送器接收到接收器发送来的“yack”信号,然后将“yack”信号同步到“xclk”时钟域上,同步的原理同上,采用两级的D触发器采样,采样时钟为“xclk”,得到同步后的“xack2”信号,xclk时钟采样到“xack2”有效后,发出下一个数据,同时让“xreq”有效一个时钟(xclk)。

案例RTL代码
module handshake_y(clky, rst_n_y, xdata, xreq, yack, ydata);
input clky;
input rst_n_y;
input[7:0] xdata;
input xreq;
output yack;
output[7:0] ydata;
reg[7:0] ydata;
reg yack;
reg yreq1, yreq2;
always@(posedge clky or negedge rst_n_y)
begin
if( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1953
1953











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









