






1、首先是环境配置,将champ和elevation_mapping资源下载好之后,使用catkin build一个个编译,其中kindr推荐使用catkin build编译成工作空间内的一个包,使用make编译的话可能在elevation_mapping编译的时候找不到。然后是跑elevation_mapping demo可能遇到的错误:
1)point_cloud_io 和message_logger需要手动安装
2)turtlebot3 demo的不可用问题:
参考https://zhuanlan.zhihu.com/p/469921393
2、配置完环境之后,可以知道elevation_mapping需要/tf、/pose、/point信息,而champd的demo缺了位姿信息,怎么办?
参考https://blog.csdn.net/qq_36212519/article/details/103251970
其实在elevation_mapping里面就有这样的处理方法,写在tf_to_pose_publisher.py中,使用的时候只需要在launch文件中加上
就可以利用tf发布位姿信息了。
参考:https://blog.csdn.net/ping96/article/details/123680214 获取坐标系的关系图
https://blog.csdn.net/abcwoabcwo/article/details/101108477 常见坐标系的关系
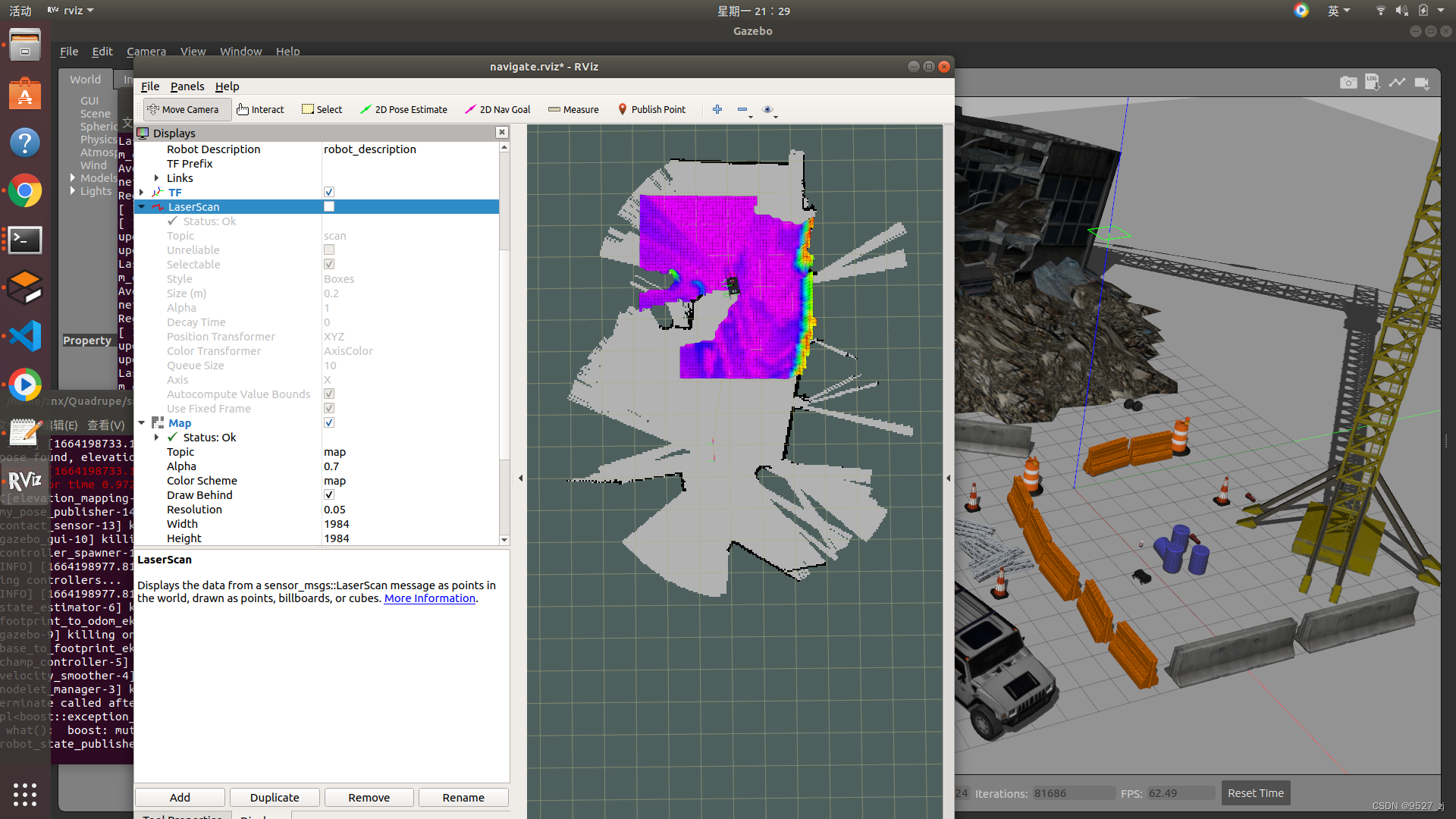
3、然后就是yaml的配置和可视化问题了
这是turtlebot3的launch文件的关于elevation_mapping的部分
可以看出起主要作用的是两个yaml文件,第二个我没做修改,第一个把话题名称修改下就可以直接使用,然后是可视化问题,我直接使用了champ的slam demo,然后把elevation map展示出来
先跑起来,其他的以后再说qaq














 1269
1269











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









