









 本文详细介绍了海康威视MVS软件在Linux环境下从安装到运行的全过程,包括环境配置、软件安装步骤、运行过程中遇到的问题及解决办法等。
本文详细介绍了海康威视MVS软件在Linux环境下从安装到运行的全过程,包括环境配置、软件安装步骤、运行过程中遇到的问题及解决办法等。
如果没有用虚拟机的话,那网上的许多相关博文如Linux系统下运行MVS等等就可以跟着步骤一步一步来了,到最后会发现完美运行MVS,可为什么到我就运行不了?。。。
环境:VMwareWorkstation15.5.1+Ubuntu16.04+相机型号:MV-CE050-31GM
1.Linux系统下MVS的安装
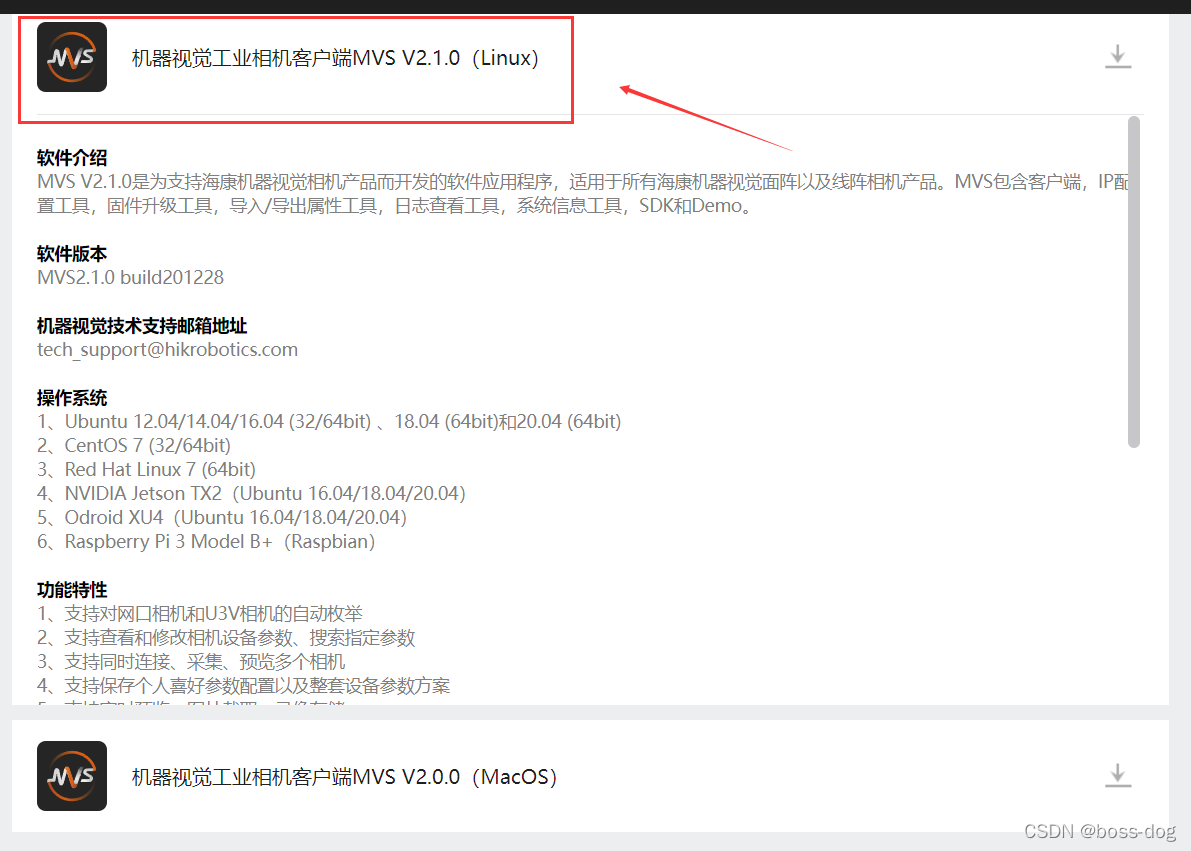
1.在海康机器人的官网,下载相应的客户端安装包。
海康机器人官网:https://www.hikrobotics.com/cn
Linux系统的MVS安装包:https://www.hikrobotics.com/cn/machinevision/service/download?module=0
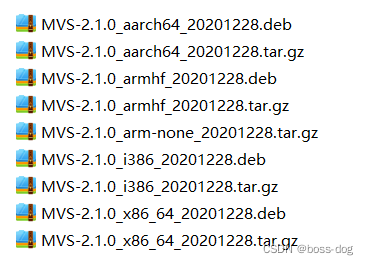
下载好了之后解压安装包会发现里面有好几个安装包,
MVS-2.1.0_armhf(Linux ARM 32位系统)
MVS-2.1.0_aarch64(Linux ARM 64位系统)
MVS-2.1.0_i386(Linux X86 32位系统)
MVS-2.1.0_x86_64(Linux X86 64位系统)
其中,deb格式的安装包与tar.gz格式的安装包无区别。
若不清楚自己的Linux系统是什么架构,在命令行运行
uname -a 查看
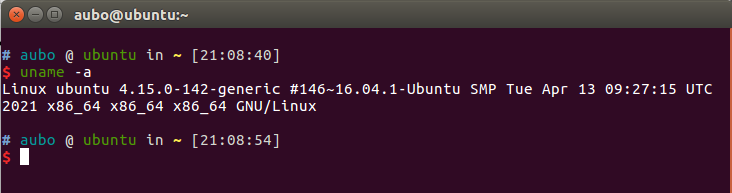
我是这里选择x86_64。
2.安装步骤
可以选择deb或tar.gz安装包进行安装,这里以MVS-2.1.0_x86_64_20201228.tar.gz为例。
1.获取root权限
sudo su
2.进入文件所在目录,解压刚刚下载的压缩包,执行
tar –xzvf MVS-2.1.0_x86_64_20201228.tar
3.解压文件后,进入MVS-2.1.0_x86_64_20201228文件夹中,执行安装程序
cd MVS-2.1.0_x86_64_20201228/
./setup.sh
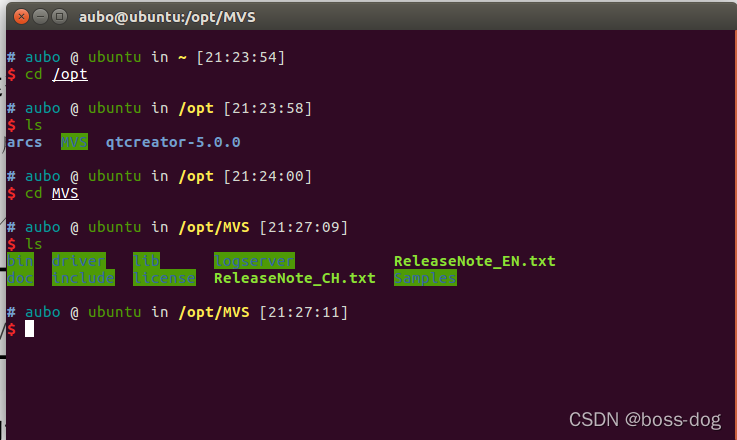
安装完成后,/opt路径下会生成MVS文件夹,包含以下内容:
作为Linux小白,我使用命令行可以进入到opt文件夹中,那为什么在界面中找不到opt文件夹呢?
参考:https://jingyan.baidu.com/article/b907e627f8910006e7891cfc.html
3.软件运行
软件安装完成后,使用命令行打开 MVS 客户端。
操作步骤:
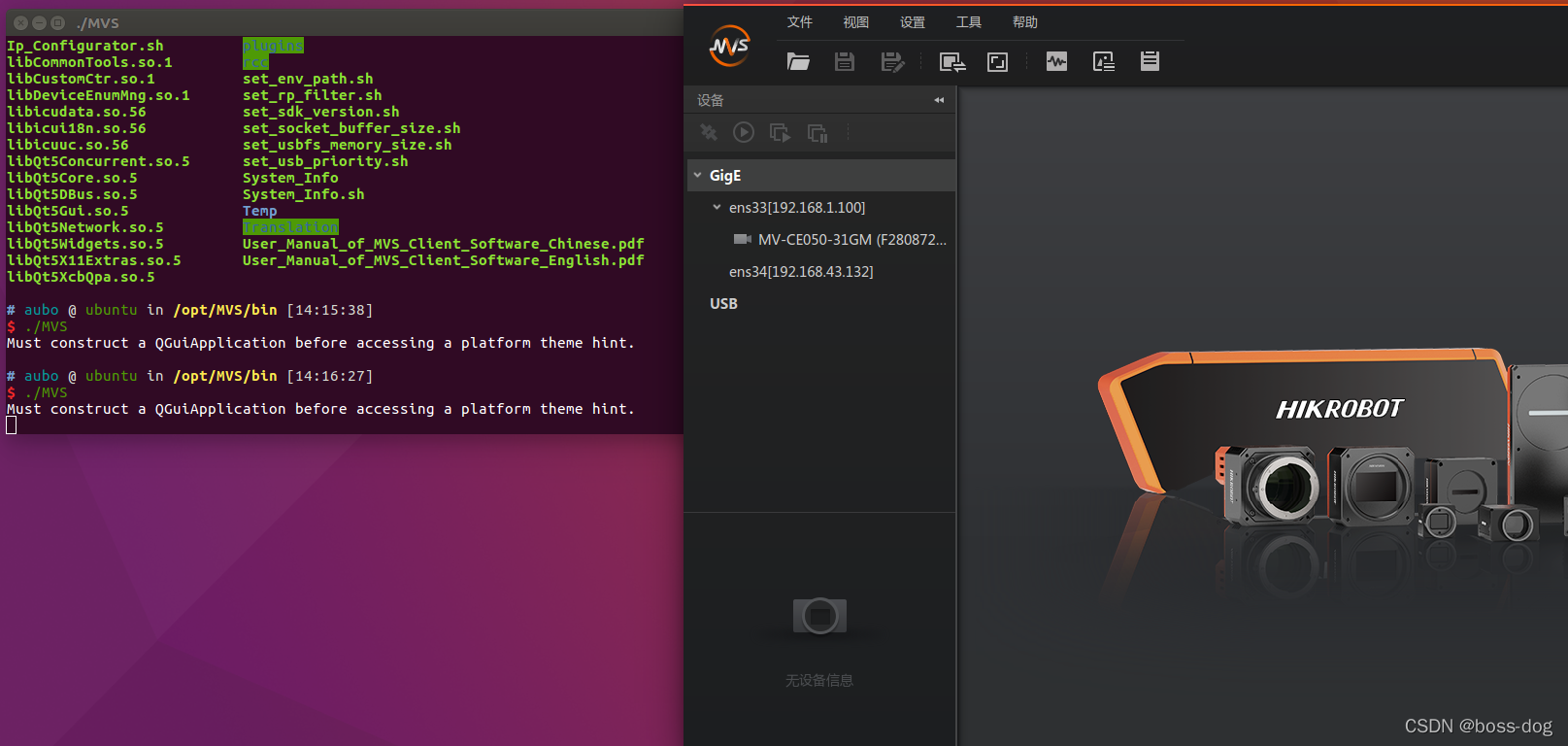
1.执行 cd /opt/MVS/bin 命令,进入 bin 目录下。
2.输入 ./MVS 。
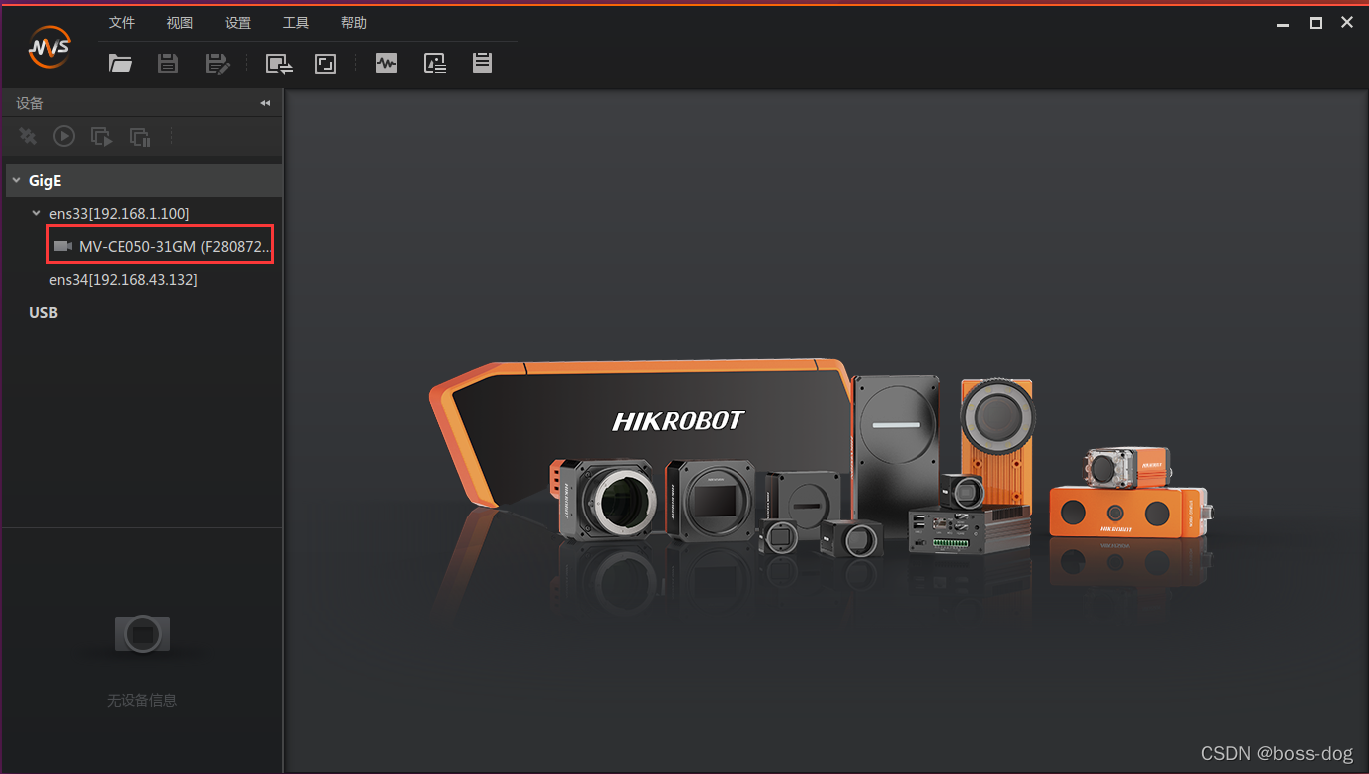
然后到这我就傻眼了。。。网上找了好几个博文都是这么操作的,别人也都正常找到相机打开了,我打开后却是这个样子?
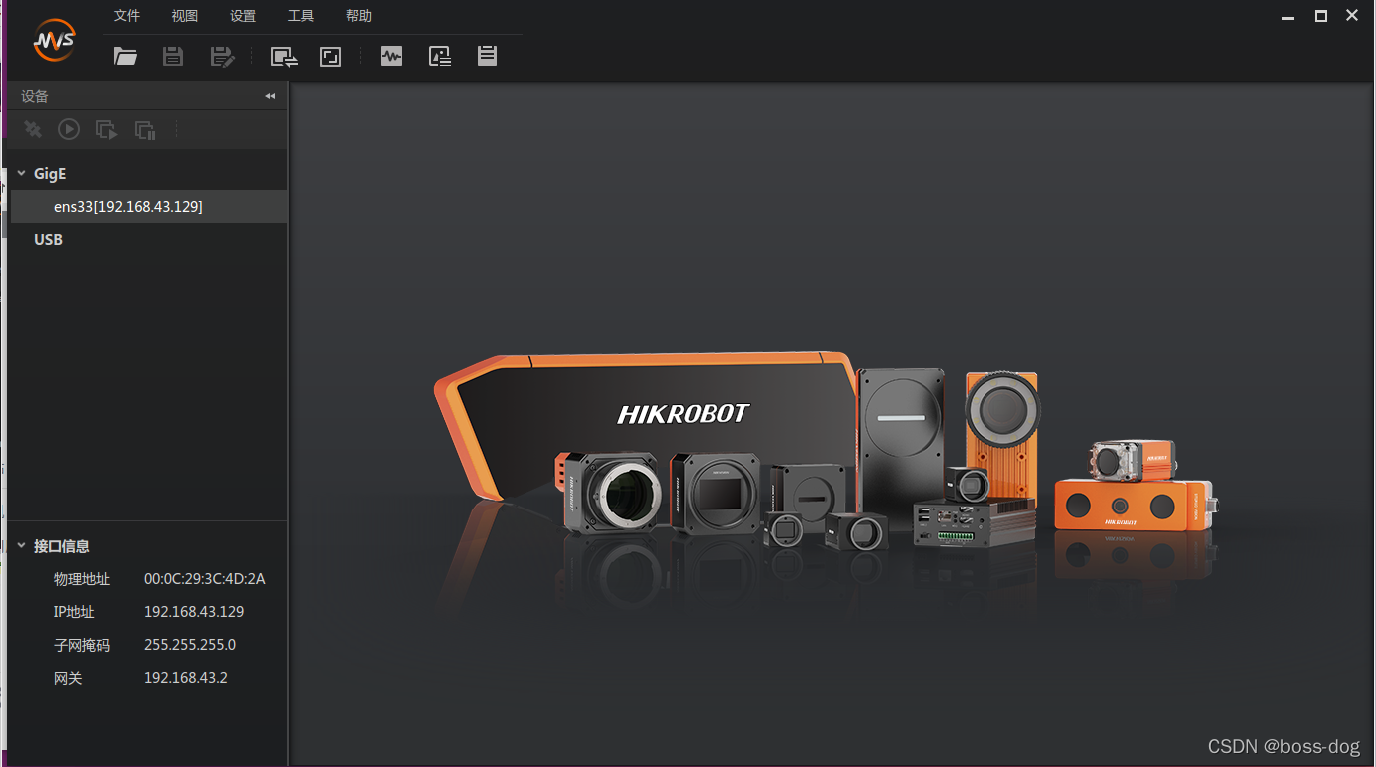
咦?特喵的我相机呢?明明相机已经连接电脑了,并且在Windows环境下的MVS打开后也能找到相机设备,怎么这里就找不到了。
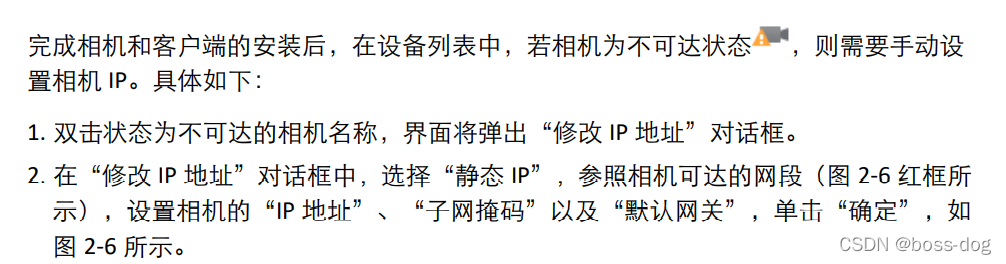
3.首先需要设置相机的静态IP,可以缩短IP的搜索时间
下面就是根据说明书的指示
打开电脑上的控制面板,依次点击网络和 Internet>网络和共享中心>更改适配器配置,选择对应的网卡,建议将 PC 的网口配置成使用静态 IP 地址。
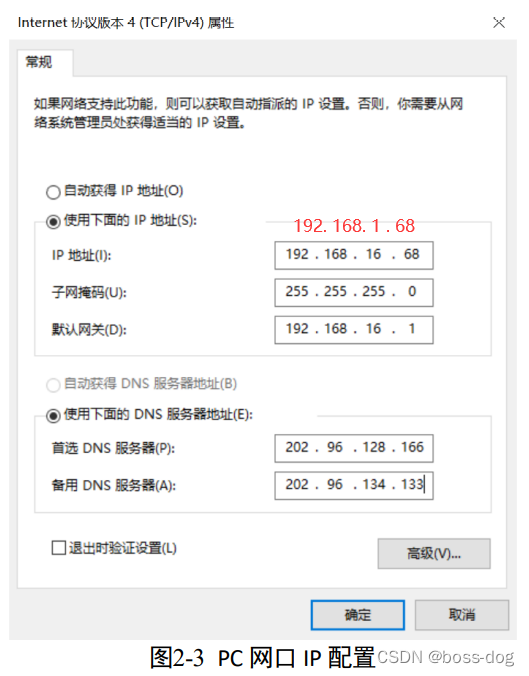
为了和下面的设置一样,IP地址改为192.168.1.68

相机IP设置

4.切换虚拟机为桥接模式
一查原因,问了大佬,原来当初装虚拟机的时候默认使用的是NAT模式,这里要切换为桥接模式。
(关于这两种模式的理解:https://blog.csdn.net/ArtemisC/article/details/83149297)
操作流程
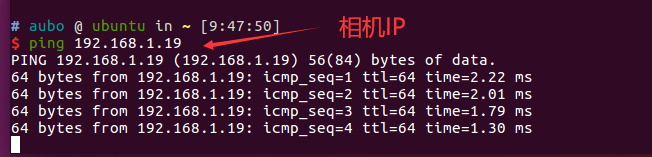
(思路梳理:相机是通过网线进行信息传输的,把相机插入电脑后,在实机中是会看到以太网就是相机的信息的,但在虚拟机中却看不到,这是因为当初在装虚拟机的时候默认选择的是NAT模式,这时需要将虚拟机切换为桥接模式,即虚拟机与实机同接在一台交换机上,但我切换好了这个模式之后,再次在虚拟机中打开MVS还是搜索不到相机,但在Ubuntu中是可以查到一个以太网的有线连接的,说明相机已经连接成功了,猜测可能是IP地址不在同一个频道,于是我这里选择固定虚拟机中的IP地址为192.168.1.100,这时候再次打开MVS发现可以搜索到了,并且通过MVS中连接到的相机查到当前相机的IP为192.168.1.19,至此解决。)
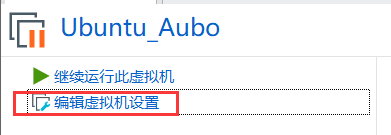
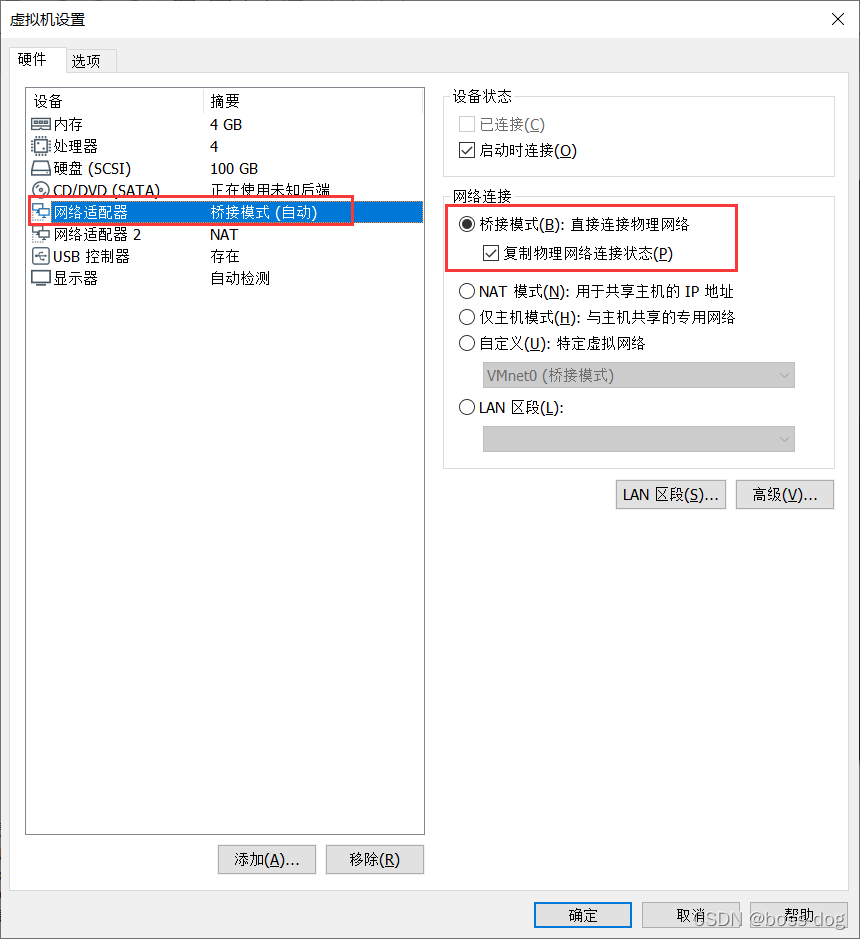
- 1.首先将当前的虚拟机关机(不是挂起),点击“编辑虚拟机设置”,点击“网络适配器”,选择“桥接模式(B):直接连接物理网络”,勾选“复制物理网络连接状态”。
- 2.在VMware Workstation下点击编辑菜单:选择“虚拟网络编辑器”,选择“VMnet0”桥接模式,注意这时候在下面的“桥接模式(将虚拟机直接连接到外部网络)(B)中”不要选择自动,要选择Realtek PCIe GbE Family Controller。
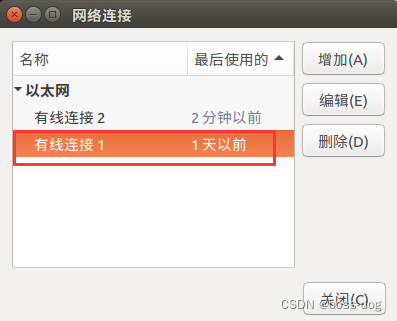
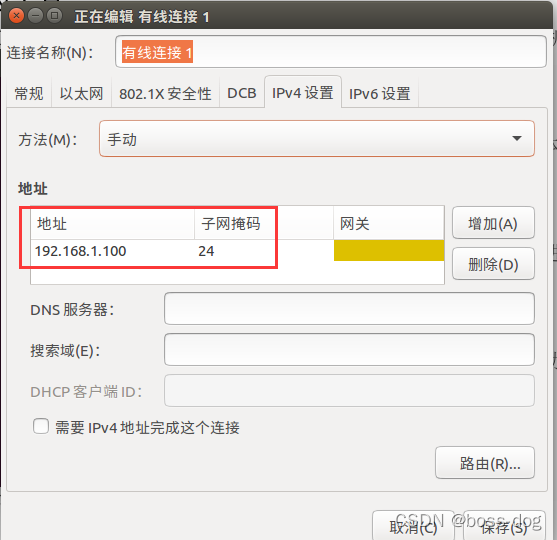
- 3.再次启动虚拟机,输入用户名和密码登录,编辑有线连接,将其IPv4设置为192.168.1.100。
- 4.再次启动MVS,成功。


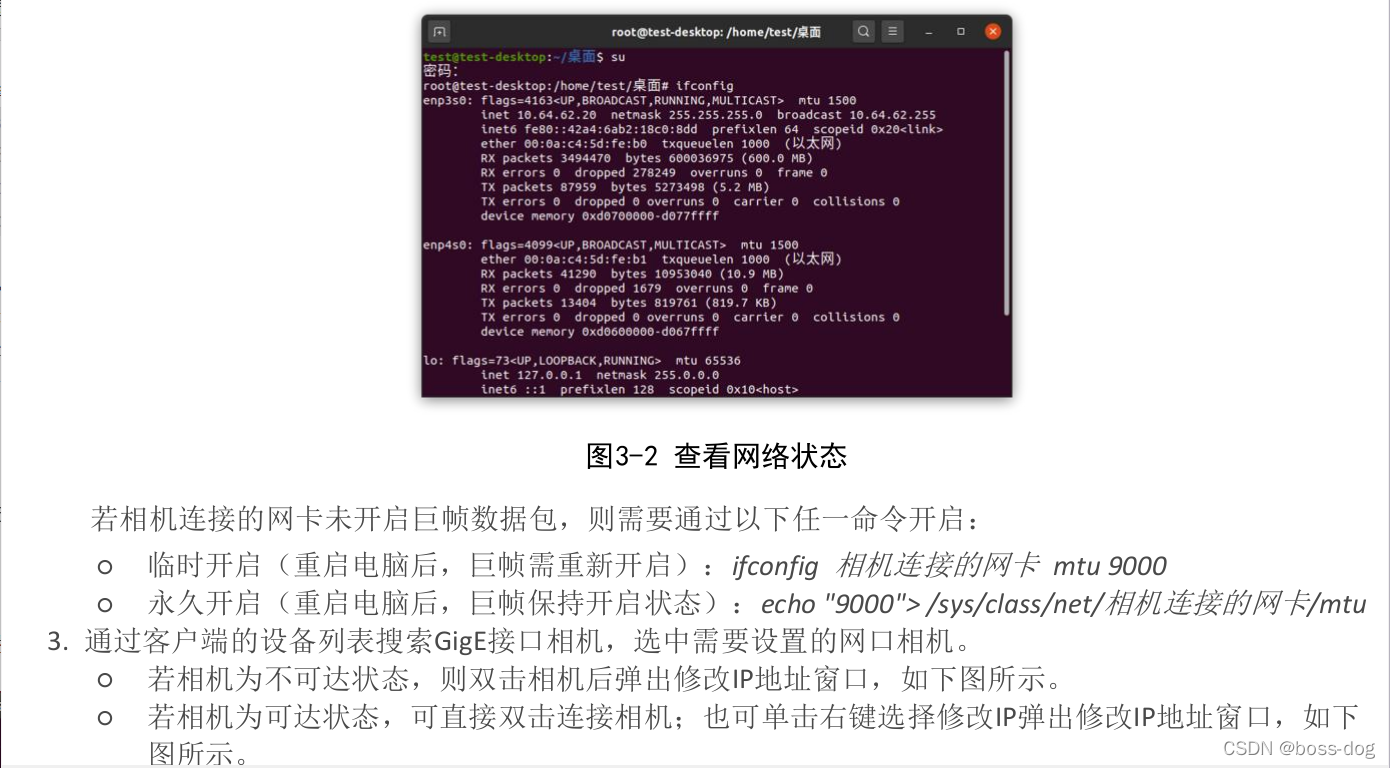
期间可以ifconfig命令用于显示或设置网络设备。

这里因为我是黑白相机。。。
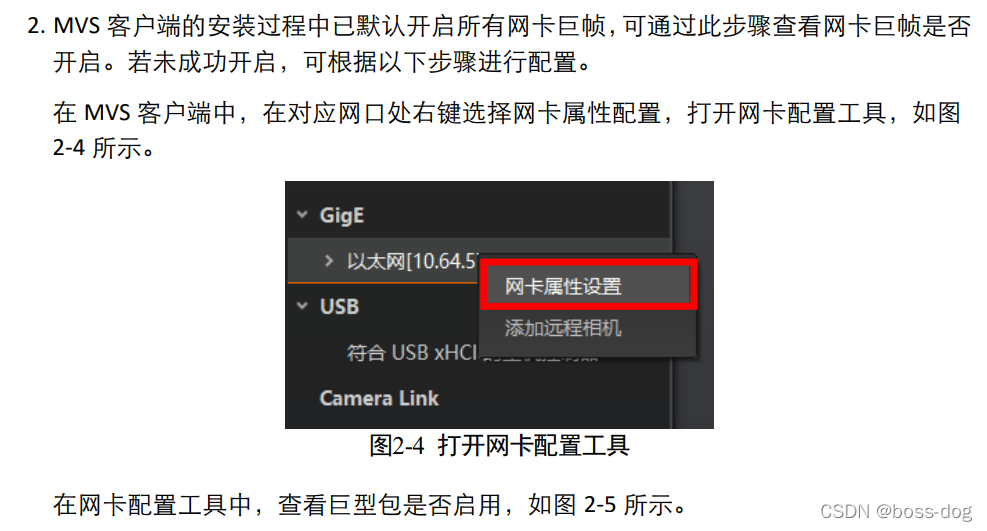
后来在Linux环境的用户手册中,也说了,网口相机通过MVS客户端使用前需确保PC和相机的IP地址处于同一个局域网,且PC的网口已开启巨帧。(为确保相机的稳定运行,建议将PC网口的IP地址设置为静态IP。)
5.示例程序运行
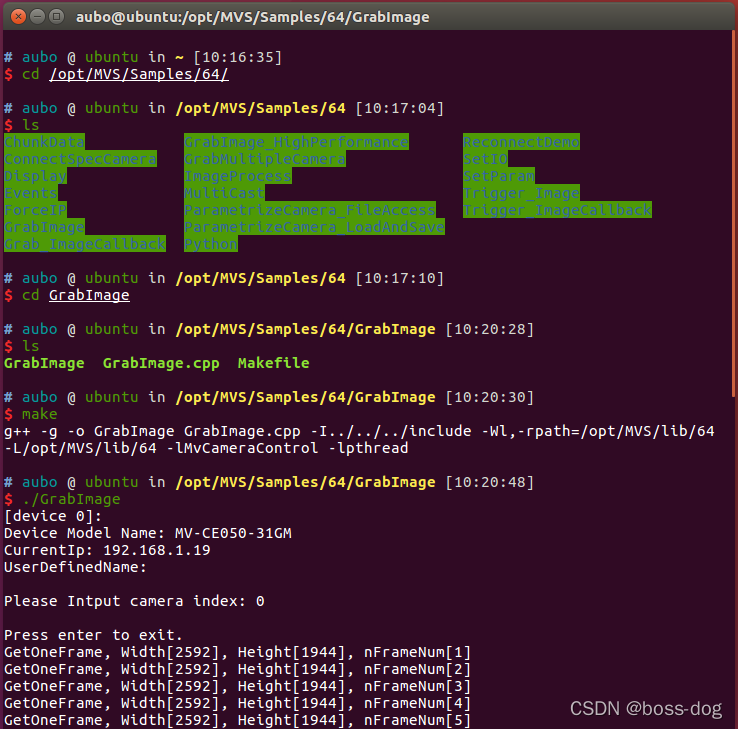
- 1.进入opt/MVS/Samples/64目录下,可查看工业相机SDK提供的示例程序。
- 2.进入GrabImage文件夹,编译程序(make),运行程序(./GrabImage)。
- 3.输入当前的相机索引号为0,即可读取相关信息。
关于资料的下载:
1.查询自己相机型号的相关参数,可以去在https://www.hikrobotics.com/cn官网中选择机器视觉->视觉产品->工业相机(看个人的型号)->选择好自己的相机型号(这里以MV-CE050-31GM为例)->资料下载->技术规格书、用户手册(基于Windows平台的MVS软件的使用)、结构图纸。
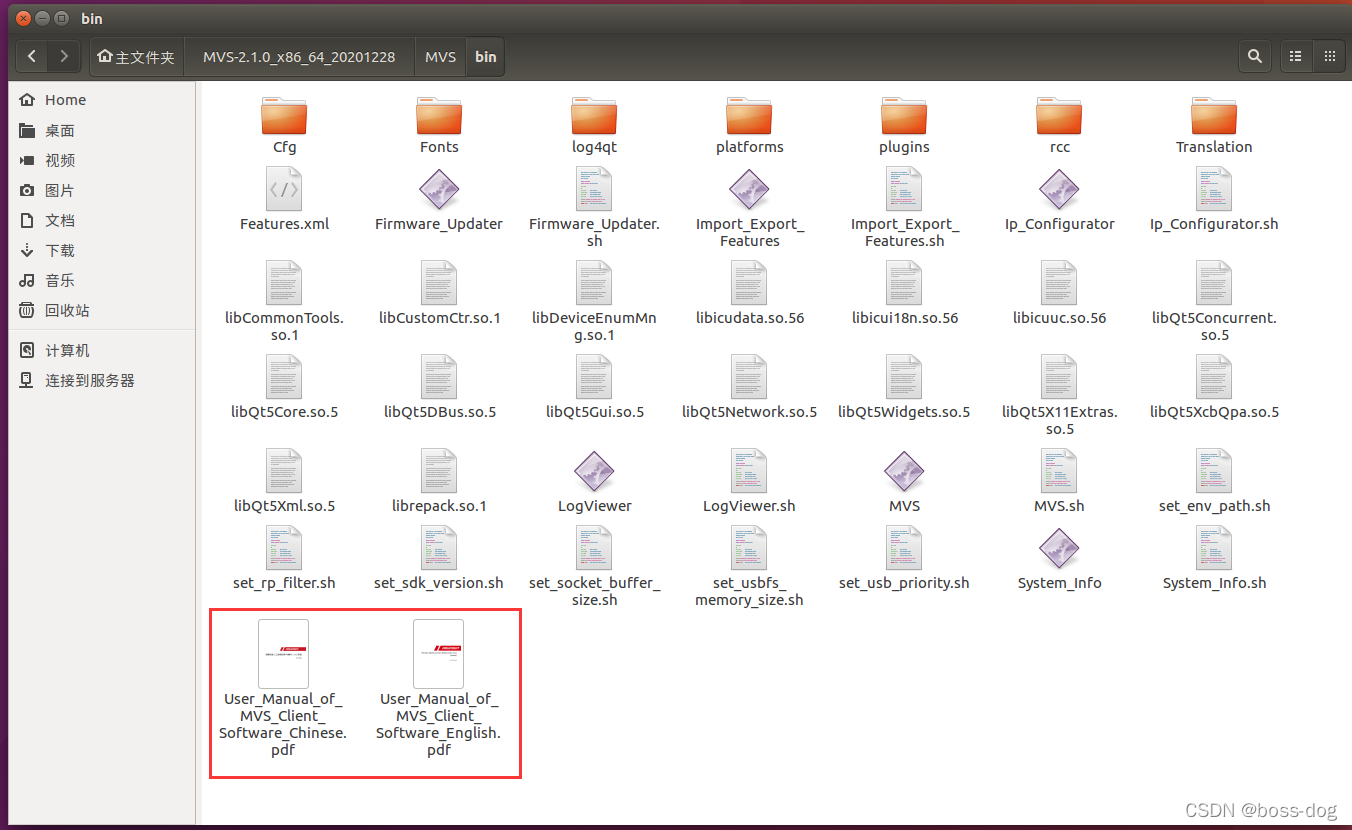
2.基于Linux平台的MVS软件使用的用户手册,在你下载的MVS的压缩包内,以MVS-2.1.0_x86_64_20201228.tar.gz为例,在路径/MVS-2.1.0_x86_64_20201228/MVS/bin下:

参考博客(感谢大佬):
https://blog.csdn.net/cugyzy/article/details/120974745
https://blog.csdn.net/weixin_46187561/article/details/120876109
https://blog.csdn.net/weixin_41965898/article/details/116801491



















 4118
4118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











