






笔者最近在用ROS编写一款传感器的驱动包,无奈这方面的教程实在太少了,网上的ROS教学基本都是已经写好了的,直接拿来用,但是对于怎么获取数据实在不知所措。于是笔者在自己弄完一个驱动包后和大家分享,希望能帮到大家。
第一步:首先按照下面的博客安装libmodbus的工具
注意其中的动态库文件和几个头文件,后面会用到
第二步:按照自己的传感器和modbus协议编写代码,这部分可以参考网上其他教程,笔者参考的是
这里笔者分享自己测试的一款自己的代码
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
#include "modbus.h"
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <time.h>
modbus_t *mb=NULL;
#define addr_phy 0x01C2
#define addr_num 0x0002
uint16_t mbbuf[2];
std::string connection_port = "";
int main(int argc, char **argv)
{
ros::init(argc,argv,"pulldata_node");
ROS_INFO("scaning available port");
bool is_connected = false;
if(mb=modbus_new_rtu("/dev/ttyUSB0",115200,'N',8,1)) //声明modbus的句柄
{
if(modbus_set_slave(mb,1)==-1)//设置从机位置为1
{
ROS_ERROR_STREAM("set slave failed");
modbus_free(mb);
}
if(modbus_connect(mb)==-1)
{
ROS_ERROR_STREAM("connect failed");
modbus_free(mb);
}
//modbus_set_response_timeout(mb,0,200000);//设置超时时间
//int m_en = modbus_write_register(mb,0,1);//modbus使能
//不过好像这一步在另外的版本中没有“使能”用到
if(modbus_read_registers(mb,addr_phy,addr_num,mbbuf)!=(-1))//读取该地址中的数据。
{
ROS_INFO("read register success");
connection_port = "/dev/ttyUSB0";
is_connected = true;
}
else
ROS_ERROR_STREAM("read register failed");
}
if(!is_connected)
{
ROS_ERROR_STREAM("control borad connection failed");
return -1;
}
ROS_INFO_STREAM("available prot: " << connection_port);
//ros::Rate loop_rate(0.2);
//ros::NodeHandle nh;
//ros::Publisher car_data_pub = nh.advertise<my_msgs::car_data>("car_data", 10);
//ros::Subscriber car_control_sub=nh.subscribe("car_cmd",10,twistCallback);
while (ros::ok())
{
//memset(mbbuf,0,10*2);//置零
if(modbus_read_registers(mb,addr_phy,addr_num,mbbuf)!=(-1))
{
//loop_rate.sleep();
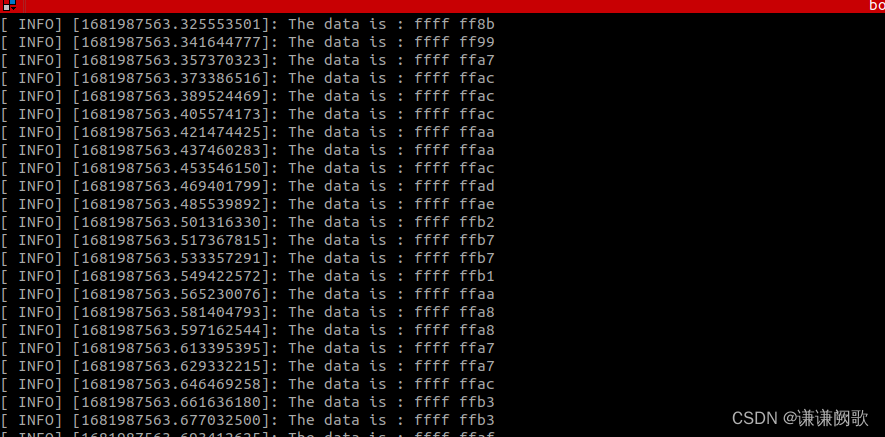
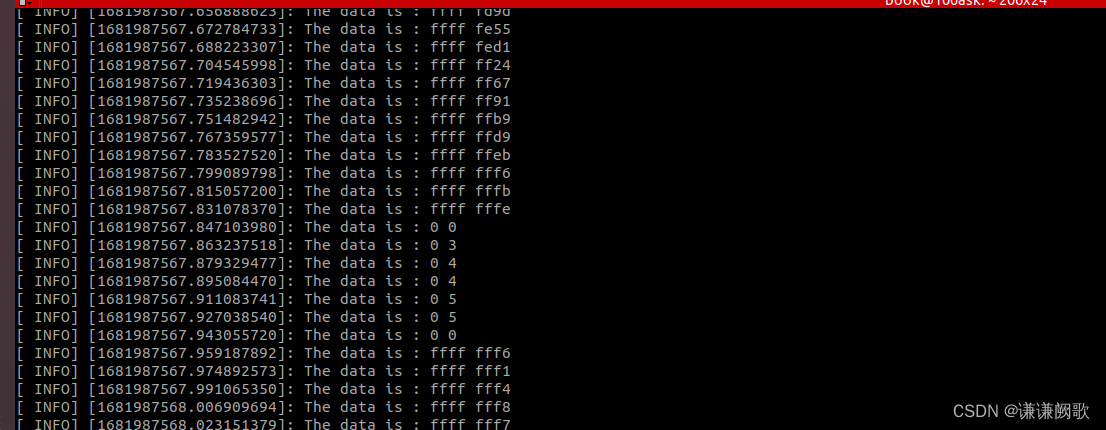
ROS_INFO("The data is : %x %x", mbbuf[0],mbbuf[1]);
//translate_mb_data();//数据传输
//car_data_pub.publish(my_data);//发布节点
}
//ros::spinOnce();
}
modbus_close(mb);
modbus_free(mb);
return 0;
//此函数在主函数(main)中一直循环
}
第三步:可以参考B站上的ROS机器人工匠阿杰的方法,修改CMakelists,当然还有更重要的编译指令。
然后接下来的步骤非常重要,笔者也是花了很大力气才调通的。
①把第一步下的几个头文件.h放入到自己写的传感器的包package的include下
②在和include的同级目录下创建一个lib文件夹,把第一步写的几个动态库文件.so拷贝进去
③在按照上述说的将CMakelists修改后,继续添加两句
(1)参考这篇文章
在这里的下一行添加一句,这句的作用是将头文件的路径包含进来
include_directories(
# include
${catkin_INCLUDE_DIRS}
)include_directories("/home/book/catkin_ws/src/pulldata_pkg/include/pulldata_pkg")(2)这里笔者参考的是这篇博客
于是在target_link_libraries处的末尾添加动态库文件,具体结果如下,这句的作用是将库文件加进来
target_link_libraries(pulldata_node
${catkin_LIBRARIES} libmodbus.so
)第四步:以上弄完之后,编译。
运行roscore,rosrun xxx,但是笔者运行自建的节点时又报错了,说找不到可执行的文件什么的。后来又找了一个小时左右,得到如下结论:
可执行的文件放在下图这样一个devel_isolated的后续目录下,可能有的小伙伴是devel文件夹,具体看各自报错调试。
然后,把这个文件拷贝到机器人工作空间,笔者按照报错也是逐步找到的
再编译及后续
重新编译,再重复替换可执行文件到上图的目录下,这样子笔者的传感器就能用modbus+ROS读出来了。
当然这只是个简单的测试程序,笔者并没有添加节点发布和订阅的功能。为大家在ROS下编写自己的驱动包贡献一份力。















 2190
2190











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









