







 作者在处理点云曲率估计时遇到内存释放问题,通过设置VS项目属性启用AVX指令集解决了问题。具体涉及到PCL库的KdTree和PrincipalCurvaturesEstimation类的使用。
作者在处理点云曲率估计时遇到内存释放问题,通过设置VS项目属性启用AVX指令集解决了问题。具体涉及到PCL库的KdTree和PrincipalCurvaturesEstimation类的使用。
这个问题困扰我一个下午,终于找到了解决方案,不过还是不太清楚具体的引发原因,应该是PCL内部的问题。
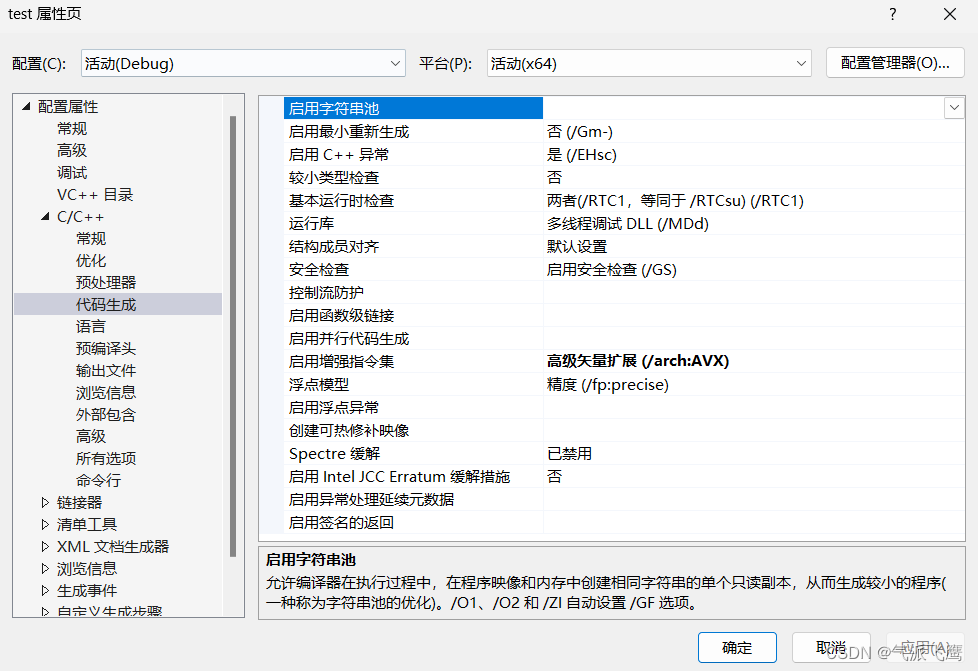
解决办法:
VS:通过项目属性->C/C+±>代码生成->启用增强指令集->选择AVX
情况说明
因为需要对点云进行曲率估计,然后我的代码是这样
pcl::search::KdTree<pcl::PointXYZ>::Ptr cloud_tree(new pcl::search::KdTree<pcl::PointXYZ>);
//主曲率估计
pcl::PrincipalCurvaturesEstimation<pcl::PointXYZ, pcl::Normal, pcl::PrincipalCurvatures> principalCurvaturesEstimation;
principalCurvaturesEstimation.setInputCloud(cloud_ptr);
principalCurvaturesEstimation.setInputNormals(normals);
principalCurvaturesEstimation.setSearchMethod(cloud_tree);
principalCurvaturesEstimation.setKSearch(cloud_ptr->points.size());
pcl::PointCloud<pcl::PrincipalCurvatures>::Ptr principalCurvatures(new pcl::PointCloud<pcl::PrincipalCurvatures>());
principalCurvaturesEstimation.compute(*principalCurvatures);
//存储曲率
vector<double> curv;
for (int i = 0; i < principalCurvatures->points.size(); i++) {
curv.push_back((principalCurvatures->points[i].pc1 + principalCurvatures->points[i].pc2) / 2);
}
return min_element(curv.begin(), curv.end()) - curv.begin();
然后函数结束的时候就会报错















 2583
2583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









