






 强化学习通过让智能体在与环境的交互中学习最优策略,以最大化长期回报,特别适用于动态复杂环境下的机器人操作。它结合深度学习和试错机制,解决运动控制器设计问题,但面临收敛速度和训练时间挑战。
强化学习通过让智能体在与环境的交互中学习最优策略,以最大化长期回报,特别适用于动态复杂环境下的机器人操作。它结合深度学习和试错机制,解决运动控制器设计问题,但面临收敛速度和训练时间挑战。
强化学习(Reinforcement Learning,RL)是机器学习的一个分支,主要研究智能体如何在与环境的交互中通过学习策略以达成回报最大化或实现特定目标的问题。它不是某一种特定的算法,而是一类算法的统称!!!
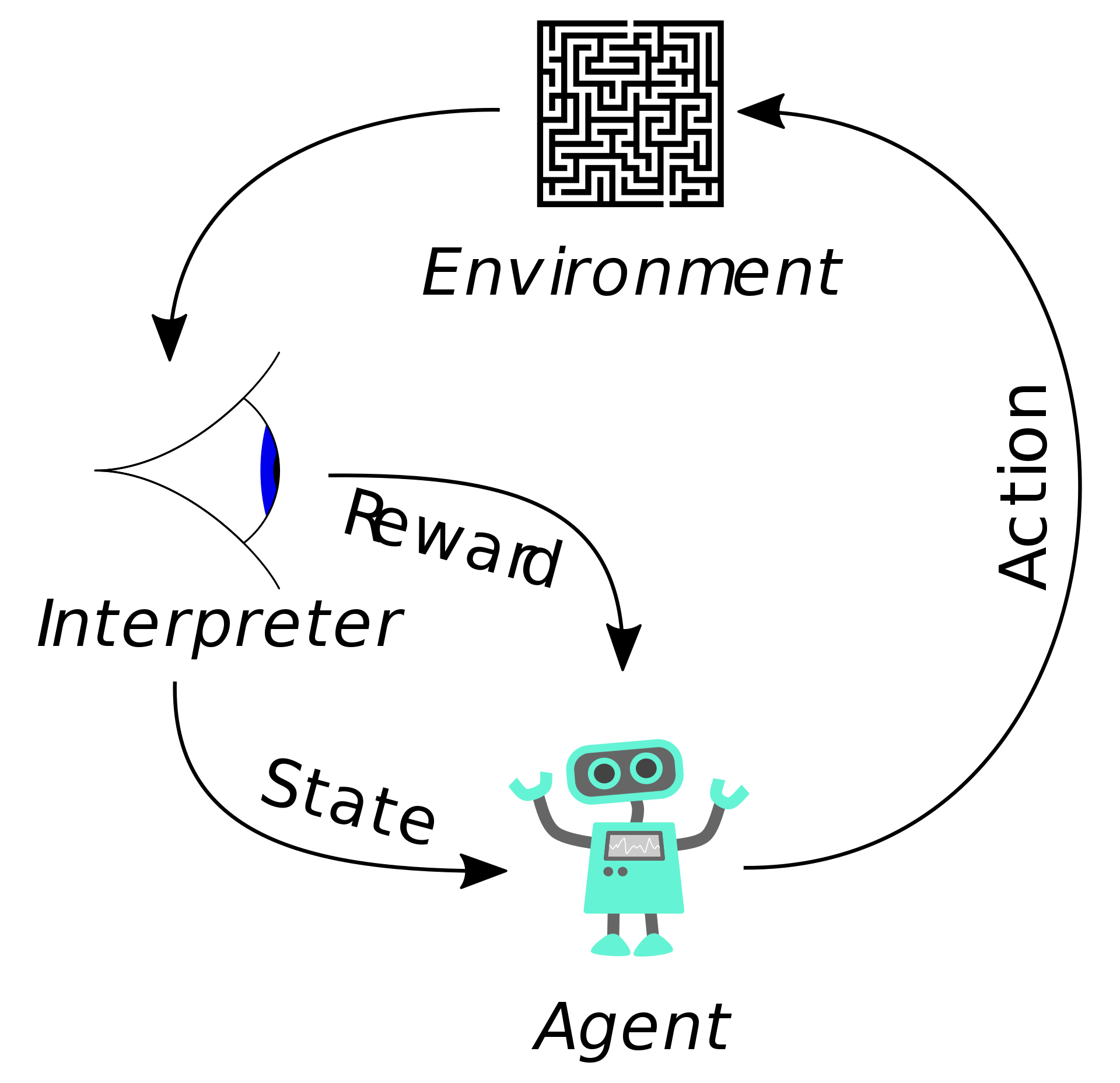
强化学习的目标是让软件智能体在特定环境中能够采取回报最大化的行为。这通常是通过试错的方式进行的,即智能体在环境中尝试不同的行为,并根据获得的奖励或惩罚来调整其行为策略。在机器人需要力反馈的操作任务中,利用强化学习可以帮助机器人学会如何在与环境交互时调整其动作以优化性能。强化学习允许机器人在与环境的交互中通过试错的方式自我学习和适应。在需要力反馈的任务中,环境的动态性、不确定性和复杂性可能会导致传统方法难以应对。而强化学习可以使机器人根据实时的环境反馈调整其行为策略,从而适应各种变化。强化学习的目标是最大化长期回报,因此它可以帮助机器人在需要力反馈的任务中找到最优的行为策略。通过不断地尝试和调整,机器人可以学会如何在不同的情境下采取最有效的动作,从而提高任务的完成效率和质量。例如:在辅助康复、家庭服务或协作作业等场景中,机器人需要与人类进行物理交互。强化学习使机器人能够学习如何根据人类的动作和力反馈做出适当的反应,以提供舒适、安全的交互体验。例如,在辅助康复训练中,机器人可以根据患者的力量和姿势调整其辅助力度,以帮助患者恢复功能。
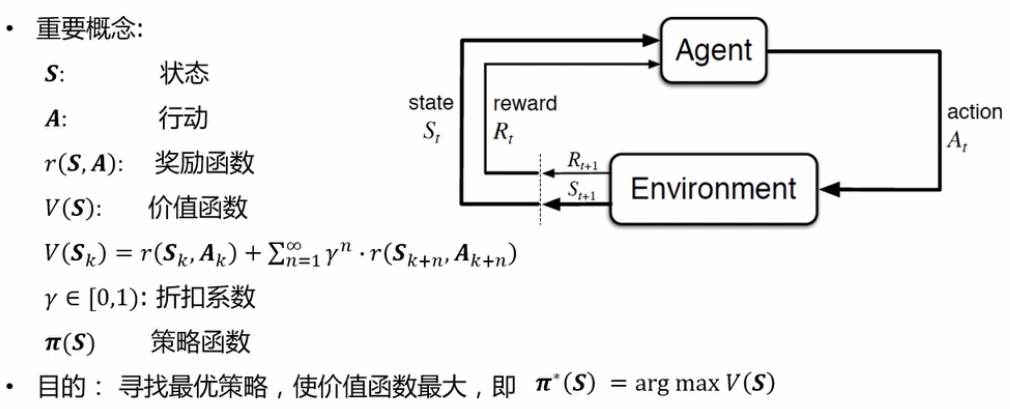
当机器人需要在复杂且动态变化的环境中进行操作时,如工厂生产线上的物料搬运或仓库中的自主导航,强化学习能够使机器人通过试错学习来适应这些变化。阻抗控制则确保机器人在与环境交互时能够保持柔顺性和稳定性,避免对物体或自身造成损伤。通过结合强化学习和阻抗控制,机器人可以更加灵活和准确地完成任务。基于强化学习的机器人控制策略是一种通过试错机制与环境进行交互,也就是通过最大化累积奖励来学习到最优策略的方法。这种方法结合了深度学习的特征提取能力与强化学习的决策能力,使得机器人能够在复杂的未知环境中稳定工作和自适应完成任务。在基于强化学习的机器人控制策略中,机器人通过与环境的不断交互,观察当前状态,并根据学习到的策略选择一个动作执行。环境会对这个动作给出反馈,即奖励信号,机器人根据这个奖励信号更新自己的策略,以便在未来能够获得更大的奖励。这个过程是迭代的,机器人通过不断地试错和学习,逐渐优化自己的控制策略。
RL 的想法是调整控制器来优化给定的奖励函数。优化是对通过执行控制器本身获取的数据进行的,这会随着经验的增加而改进。强化学习已被用来简化运动控制器的设计,实现部分设计过程的自动化,并学习以前方法无法设计的行为。然而,基于强化学习的机器人控制策略也存在一些挑战,如收敛速度慢、训练时间长等问题。
对于state来说:定义机器人的状态空间,这些状态通常包括机器人的位置、速度、加速度等运动学信息,以及可能包括的力反馈信息。
那么action可以是:更多内容请参考基于强化学习(Reinforcement Learning)的机器人控制策略 - 古月居 (guyuehome.com)

















 553
553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









