







https://download.csdn.net/download/qq_45685327/87719249
1.编写封装惯性矩阵算法的 xacro 文件
head.xacro
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<xacro:macro name="Box_inertial_matrix" params="m l w h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w + l*l)/12}" iyz= "0"
izz="${m*(w*w + h*h)/12}" />
</inertial>
</xacro:macro>
</robot>
2.底盘 Xacro 文件
deamo02_base.xacro
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="PI" value="3.1415926"/>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
<xacro:property name="base_footprint_radius" value="0.001" />
<xacro:property name="base_link_radius" value="0.1" />
<xacro:property name="base_link_length" value="0.08" />
<xacro:property name="earth_space" value="0.015" />
<xacro:property name="base_link_m" value="0.5" />
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${base_footprint_radius}" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_link_radius}" length="${base_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.5 0.3 0.0 0.5" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${base_link_radius}" length="${base_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<xacro:cylinder_inertial_matrix m="${base_link_m}" r="${base_link_radius}" h="${base_link_length}" />
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 ${earth_space + base_link_length / 2 }" />
</joint>
<gazebo reference="base_link">
<material>Gazebo/Yellow</material>
</gazebo>
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="wheel_m" value="0.05" />
<xacro:macro name="add_wheels" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_m}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" />
<axis xyz="0 1 0" />
</joint>
<gazebo reference="${name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
</xacro:macro>
<xacro:add_wheels name="left" flag="1" />
<xacro:add_wheels name="right" flag="-1" />
<xacro:property name="support_wheel_radius" value="0.0075" />
<xacro:property name="support_wheel_m" value="0.03" />
<xacro:macro name="add_support_wheel" params="name flag" >
<link name="${name}_wheel">
<visual>
<geometry>
<sphere radius="${support_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
</visual>
<collision>
<geometry>
<sphere radius="${support_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<xacro:sphere_inertial_matrix m="${support_wheel_m}" r="${support_wheel_radius}" />
</link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" />
<axis xyz="1 1 1" />
</joint>
<gazebo reference="${name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
</xacro:macro>
<xacro:add_support_wheel name="front" flag="1" />
<xacro:add_support_wheel name="back" flag="-1" />
</robot>
注意: 如果机器人模型在 Gazebo 中产生了抖动,滑动,缓慢位移 .... 诸如此类情况,请查看
-
惯性矩阵是否设置了,且设置是否正确合理
-
车轮翻转需要依赖于 PI 值,如果 PI 值精度偏低,也可能导致上述情况产生
3.摄像头 Xacro 文件
deamo03_camera.xacro
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="camera_length" value="0.01" />
<xacro:property name="camera_width" value="0.025" />
<xacro:property name="camera_height" value="0.025" />
<xacro:property name="camera_x" value="0.08" />
<xacro:property name="camera_y" value="0.0" />
<xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" />
<xacro:property name="camera_m" value="0.01" />
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:Box_inertial_matrix m="${camera_m}" l="${camera_length}" w="${camera_width}" h="${camera_height}" />
</link>
<joint name="camera2base_link" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${camera_x} ${camera_y} ${camera_z}" />
</joint>
<gazebo reference="camera">
<material>Gazebo/Blue</material>
</gazebo>
</robot>
4.雷达 Xacro 文件
deamo04_laser.xacro
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="support_length" value="0.15" />
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_x" value="0.0" />
<xacro:property name="support_y" value="0.0" />
<xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" />
<xacro:property name="support_m" value="0.02" />
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="red">
<color rgba="0.8 0.2 0.0 0.8" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${support_m}" r="${support_radius}" h="${support_length}" />
</link>
<joint name="support2base_link" type="fixed">
<parent link="base_link" />
<child link="support" />
<origin xyz="${support_x} ${support_y} ${support_z}" />
</joint>
<gazebo reference="support">
<material>Gazebo/White</material>
</gazebo>
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_x" value="0.0" />
<xacro:property name="laser_y" value="0.0" />
<xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" />
<xacro:property name="laser_m" value="0.1" />
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${laser_m}" r="${laser_radius}" h="${laser_length}" />
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser" />
<origin xyz="${laser_x} ${laser_y} ${laser_z}" />
</joint>
<gazebo reference="laser">
<material>Gazebo/Black</material>
</gazebo>
</robot>
5.组合底盘、摄像头与雷达的 Xacro 文件
deamo05_Gazebocar.xacro
<robot name="xacrocar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="head.xacro" />
<xacro:include filename="deamo02_base.xacro" />
<xacro:include filename="deamo03_camera.xacro" />
<xacro:include filename="deamo04_laser.xacro" />
</robot>
6.编写launch文件
deamo02_Gazebocar.launch
<launch>
<!-- 将 Urdf 文件的内容加载到参数服务器 -->
<param name="robot_description" command="$(find xacro)/xacro $(find urdf02_gazebo)/urdf/deamo05_Gazebocar.xacro" />
<!-- 启动 gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch" />
<!-- 在 gazebo 中显示机器人模型 -->
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
7.运行launch文件查看效果
source ./devel/setup.bash
roslaunch urdf02_gazebo deamo02_Gazebocar.launch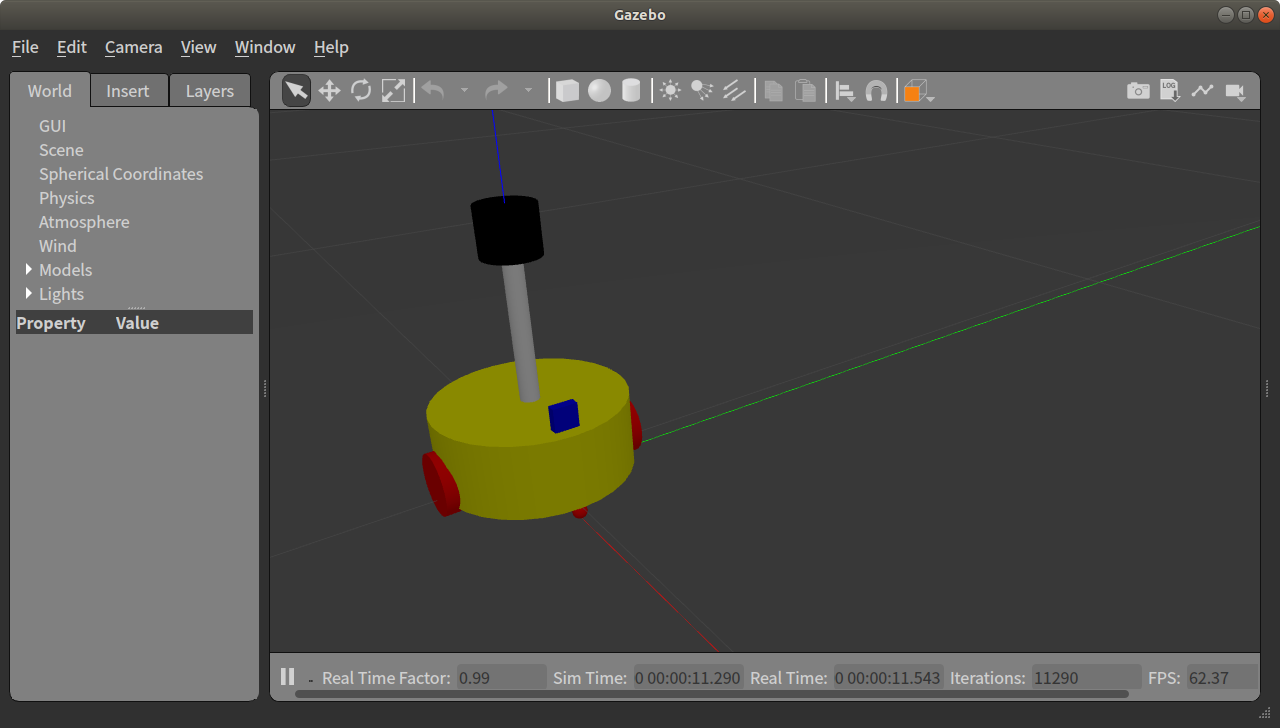















 3089
3089











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









