






阿克曼小车:从转向原理到运动学模型详解
一、阿克曼转向几何:为什么汽车转弯时内外轮角度不同?
1.1 核心原理:让车轮轨迹成为同心圆
阿克曼转向几何的本质是确保车辆转弯时,所有车轮的延长线交于同一点(即瞬时转向中心,ICR)。这类似于用圆规画圆时,所有笔尖必须指向圆心。若内外轮转角相同,车轮轨迹会偏离同心圆,导致轮胎侧滑(如图1)。
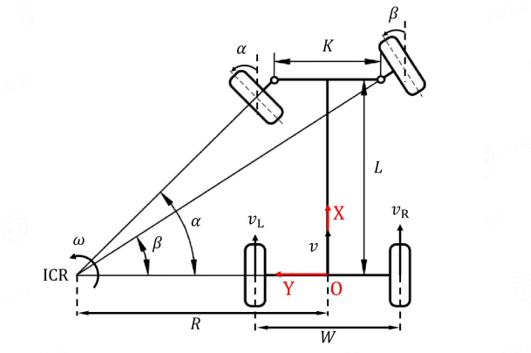
图1:阿克曼转向避免侧滑的原理
数学关系推导
假设轴距为 L ,轮距为 W ,转弯半径为 R ,内外轮转角分别为
α
\alpha
α 和
β
\beta
β,则有:
{
tan
α
=
L
R
−
K
/
2
tan
β
=
L
R
+
K
/
2
\begin{cases} \tan \alpha = \frac{L}{R - K/2} \\ \tan \beta = \frac{L}{R + K/2} \end{cases}
{tanα=R−K/2Ltanβ=R+K/2L
由公式可得:外侧轮转角
β
\beta
β 必须小于内侧轮转角
α
\alpha
α,且两者满足关系:
cot
β
−
cot
α
=
K
L
\cot \beta - \cot \alpha = \frac{K}{L}
cotβ−cotα=LK
这一公式表明转向机构的核心:通过机械连杆或电子控制,强制内外轮转角遵循此规律。
1.2 实例
参数定义
| 符号 | 物理意义 | 典型值(家用轿车) |
|---|---|---|
| L L L | 轴距(前后轮距离) | 2.5米 |
| W W W | 轮距(左右轮距离) | 1.6米 |
| K K K | 转向主销中心距 | 0.3米 |
生活中的阿克曼转向
以停车场直角转弯为例:
- 现象:方向盘左打时,左前轮明显比右前轮“转得更急”。
- 原理:若左前轮转角为 2 5 ∘ 25^\circ 25∘,右前轮可能仅 2 0 ∘ 20^\circ 20∘,确保四轮轨迹交于ICR点,避免轮胎横向摩擦。
二、逆运动学模型:如何控制小车转弯?(原理→举例)
2.1 模型原理:从整体运动到轮子动作
输入:车辆速度
v
v
v 和角速度
ω
\omega
ω
输出:左右轮速度
v
L
,
v
R
v_L, v_R
vL,vR 和前轮转角
α
\alpha
α
核心公式:
- 转弯半径 R = v ω R = \frac{v}{\omega} R=ωv
- 内侧轮转角 α = tan − 1 ( L R − K / 2 ) \alpha = \tan^{-1} \left( \frac{L}{R - K/2} \right) α=tan−1(R−K/2L)
- 左右轮速度差 v R − v L = ω ⋅ W v_R - v_L = \omega \cdot W vR−vL=ω⋅W
2.2 举例:低速直角转弯控制
场景:小车以 v = 0.5 m/s v = 0.5 \, \text{m/s} v=0.5m/s、角速度 ω = 0.1 rad/s \omega = 0.1 \, \text{rad/s} ω=0.1rad/s 左转,参数 L = 2 m , W = 1.2 m , K = 0.2 m L=2 \, \text{m}, W=1.2 \, \text{m}, K=0.2 \, \text{m} L=2m,W=1.2m,K=0.2m。
分步计算
- 计算转弯半径:
R = 0.5 0.1 = 5 m R = \frac{0.5}{0.1} = 5 \, \text{m} R=0.10.5=5m - 计算左前轮转角:
α = tan − 1 ( 2 5 − 0.1 ) ≈ 21. 8 ∘ \alpha = \tan^{-1} \left( \frac{2}{5 - 0.1} \right) \approx 21.8^\circ α=tan−1(5−0.12)≈21.8∘ - 计算右前轮转角:
由 cot β − cot 21. 8 ∘ = 0.2 2 \cot \beta - \cot 21.8^\circ = \frac{0.2}{2} cotβ−cot21.8∘=20.2,解得 β ≈ 17. 5 ∘ \beta \approx 17.5^\circ β≈17.5∘ - 计算左右轮速度:
{ v L = 0.5 − 0.1 × 0.6 = 0.44 m/s v R = 0.5 + 0.1 × 0.6 = 0.56 m/s \begin{cases} v_L = 0.5 - 0.1 \times 0.6 = 0.44 \, \text{m/s} \\ v_R = 0.5 + 0.1 \times 0.6 = 0.56 \, \text{m/s} \end{cases} {vL=0.5−0.1×0.6=0.44m/svR=0.5+0.1×0.6=0.56m/s
结果验证:
- 速度差 0.56 − 0.44 = 0.12 m/s 0.56 - 0.44 = 0.12 \, \text{m/s} 0.56−0.44=0.12m/s,与公式 ω ⋅ W = 0.1 × 1.2 = 0.12 m/s \omega \cdot W = 0.1 \times 1.2 = 0.12 \, \text{m/s} ω⋅W=0.1×1.2=0.12m/s 一致。
- 前轮转角差异 21. 8 ∘ − 17. 5 ∘ = 4. 3 ∘ 21.8^\circ - 17.5^\circ = 4.3^\circ 21.8∘−17.5∘=4.3∘,符合阿克曼几何约束。
三、正运动学模型:如何通过轮速推算车辆运动?(原理→举例)
3.1 模型原理:从轮子动作到整体运动
输入:左右轮速度
v
L
,
v
R
v_L, v_R
vL,vR 和前轮转角
α
\alpha
α
输出:车辆速度
v
v
v 和角速度
ω
\omega
ω
核心公式:
- 车辆速度 v = v L + v R 2 v = \frac{v_L + v_R}{2} v=2vL+vR
- 角速度 ω = v R − v L W \omega = \frac{v_R - v_L}{W} ω=WvR−vL 或 ω = v L tan α + K / 2 \omega = \frac{v}{\frac{L}{\tan \alpha} + K/2} ω=tanαL+K/2v
3.2 举例:小车的运动状态反推
场景:左轮速度 v L = 0.3 m/s v_L = 0.3 \, \text{m/s} vL=0.3m/s,右轮速度 v R = 0.5 m/s v_R = 0.5 \, \text{m/s} vR=0.5m/s,左前轮转角 α = 1 5 ∘ \alpha = 15^\circ α=15∘,参数 L = 1.5 m , W = 1.0 m , K = 0.1 m L=1.5 \, \text{m}, W=1.0 \, \text{m}, K=0.1 \, \text{m} L=1.5m,W=1.0m,K=0.1m。
分步计算
- 计算车辆速度:
v = 0.3 + 0.5 2 = 0.4 m/s v = \frac{0.3 + 0.5}{2} = 0.4 \, \text{m/s} v=20.3+0.5=0.4m/s - 方法一:通过轮速差计算角速度:
ω = 0.5 − 0.3 1.0 = 0.2 rad/s \omega = \frac{0.5 - 0.3}{1.0} = 0.2 \, \text{rad/s} ω=1.00.5−0.3=0.2rad/s - 方法二:通过转向角计算角速度:
转弯半径 R = 1.5 tan 1 5 ∘ + 0.05 ≈ 5.8 m R = \frac{1.5}{\tan 15^\circ} + 0.05 \approx 5.8 \, \text{m} R=tan15∘1.5+0.05≈5.8m
ω = 0.4 5.8 ≈ 0.069 rad/s \omega = \frac{0.4}{5.8} \approx 0.069 \, \text{rad/s} ω=5.80.4≈0.069rad/s
四、实际应用与拓展思考
4.1 自动驾驶中的路径跟踪
- 控制逻辑:根据目标路径计算所需 v v v 和 ω \omega ω,通过逆运动学模型驱动车轮。
- 难点:动态环境中需实时调整参数,例如紧急避障时瞬间增大 ω \omega ω。
4.2 四轮独立转向
- 原理:取消阿克曼约束,四轮同向偏转,实现横向平移。
- 运动学变化:
- 前进速度 v = v L + v R 2 v = \frac{v_L + v_R}{2} v=2vL+vR(与阿克曼相同)
- 横向速度 v lat = v F + v B 2 ⋅ sin θ v_{\text{lat}} = \frac{v_F + v_B}{2} \cdot \sin \theta vlat=2vF+vB⋅sinθ
- ( θ \theta θ 为转向角)
五、代码实现:
void AckermannInverseKinematics(float linear_velocity, float steering_angle_rad)
{
// 核心目的:将线速度与转向角度转换为舵机控制信号和轮速,实现阿克曼转向模型
// --- 校准阶段:获取舵机中位偏差值,补偿硬件安装误差 ---
// 通过电位器读取当前舵机中位偏差(例如ADC采样值),并缩放为实际角度偏差
// 公式:校准值 = -原始电位器读数 / 缩放系数
Akm_Servo.Bias = -get_DMA_ServoBias() / 5.0f;
// --- 阿克曼转向参数定义 ---
float turn_radius = 0; // 当前转弯半径(单位:米)
float inner_wheel_angle = 0; // 内侧前轮转向角度(单位:弧度)
// 将输入参数 steering_angle_rad 解析为内侧前轮转向角度
// 注:此处代码假设输入 steering_angle_rad 为右前轮角度,但命名为 inner_wheel_angle 以统一模型
inner_wheel_angle = steering_angle_rad;
// --- 转向角度限幅:防止机械结构过载 ---
const float max_steering_angle = 30.0f; // 最大允许转向角度(单位:度)
// 计算左转极限时的最小转弯半径(基于阿克曼几何公式)
// 公式:最小转弯半径 = 轴距 / tan(最大转向角) + 半轮距
float min_turn_radius = robot.HardwareParam.AxleSpacing / tan(degrees_to_radians(max_steering_angle))
+ 0.5f * robot.HardwareParam.WheelSpacing;
// 计算右转极限时的最小内侧轮转向角(负号表示右转方向)
// 公式:最小右转角度 = arctan(轴距 / ( -最小转弯半径 - 半轮距 ))
float min_right_steering_angle = atan(
robot.HardwareParam.AxleSpacing / (-min_turn_radius - 0.5f * robot.HardwareParam.WheelSpacing)
);
// 对实际转向角度进行限幅,确保在机械允许范围内
// 函数 target_limit_float 将角度限制在 [min_right_steering_angle, max_steering_angle_rad] 区间
inner_wheel_angle = clamp_steering_angle(
inner_wheel_angle,
min_right_steering_angle,
degrees_to_radians(max_steering_angle)
);
// --- 计算转弯半径(基于阿克曼几何) ---
// 公式:转弯半径 = 轴距 / tan(内侧轮转向角) + 半轮距
if (inner_wheel_angle != 0) {
turn_radius = robot.HardwareParam.AxleSpacing / tan(inner_wheel_angle)
+ 0.5f * robot.HardwareParam.WheelSpacing;
}
// 逆运动学计算:根据转弯半径和线速度求解轮速
if (inner_wheel_angle != 0) {
// 内侧轮速度公式:V_inner = Vx * (R - 半轮距) / R
robot.LEFT_WHEEL.Target = linear_velocity
* (turn_radius - 0.5f * robot.HardwareParam.WheelSpacing)
/ turn_radius;
// 外侧轮速度公式:V_outer = Vx * (R + 半轮距) / R
robot.RIGHT_WHEEL.Target = linear_velocity
* (turn_radius + 0.5f * robot.HardwareParam.WheelSpacing)
/ turn_radius;
} else {
// 直行时左右轮速度相等
robot.LEFT_WHEEL.Target = linear_velocity;
robot.RIGHT_WHEEL.Target = linear_velocity;
}
// --- 舵机控制信号生成:转向角度 → PWM值(多项式拟合非线性映射) ---
// 使用三次多项式拟合转向角度与舵机PWM的关系,补偿机械非线性误差
// 实验标定系数:PWM = a + bθ + cθ² + dθ³
robot.SERVO.Target = 7.75f
+ 850.0f * inner_wheel_angle
- 396.0f * pow(inner_wheel_angle, 2)
- 76.2f * pow(inner_wheel_angle, 3);
// --- 舵机最终输出:叠加中位值、校准偏差和计算值 ---
// 公式:最终PWM = 理论中位值 + 校准偏差 + 非线性补偿值
robot.SERVO.Output = Akm_Servo.Mid // 舵机理论中位PWM(如1500μs)
+ Akm_Servo.Bias // 校准值(补偿安装误差)
+ robot.SERVO.Target; // 非线性补偿后的目标PWM
}

















 3868
3868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









