






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
摘要
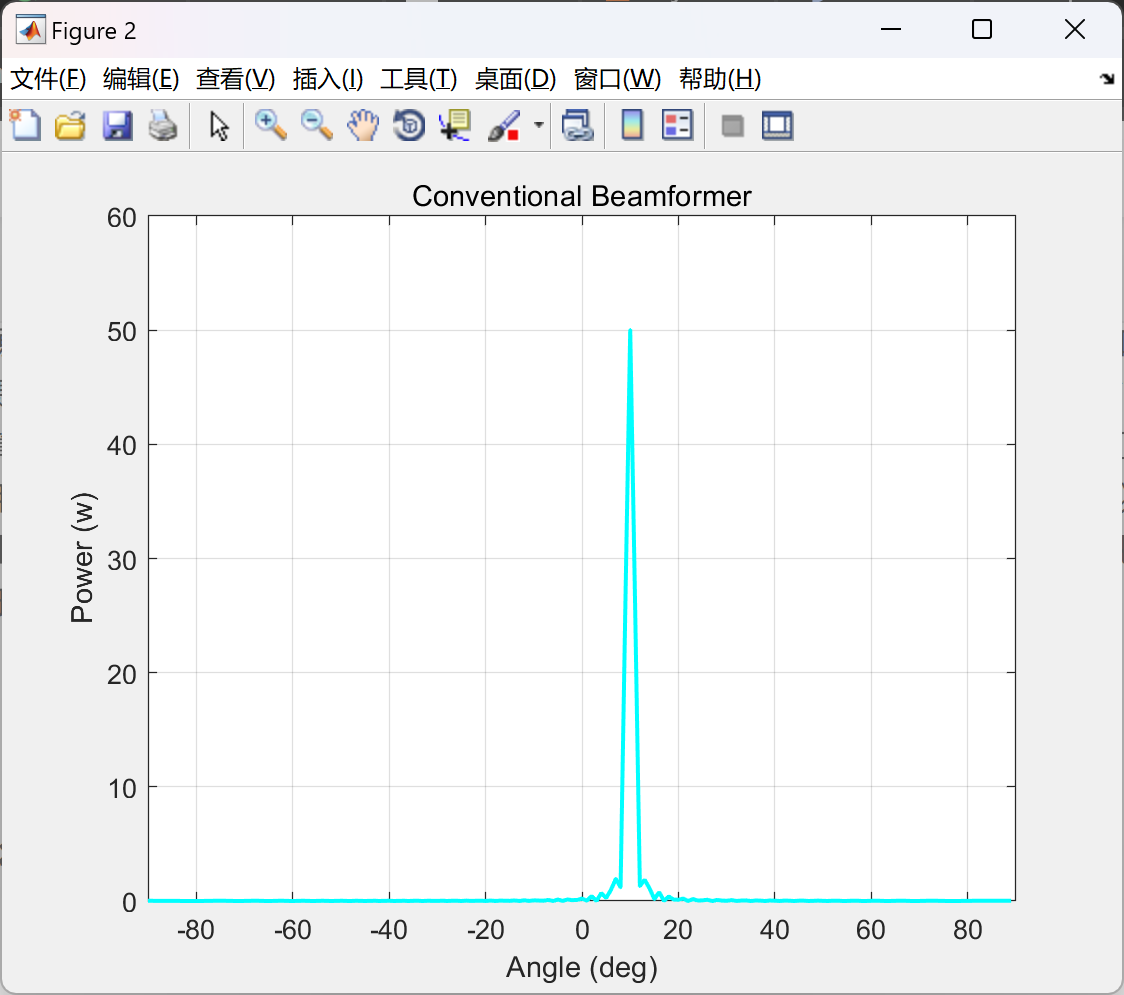
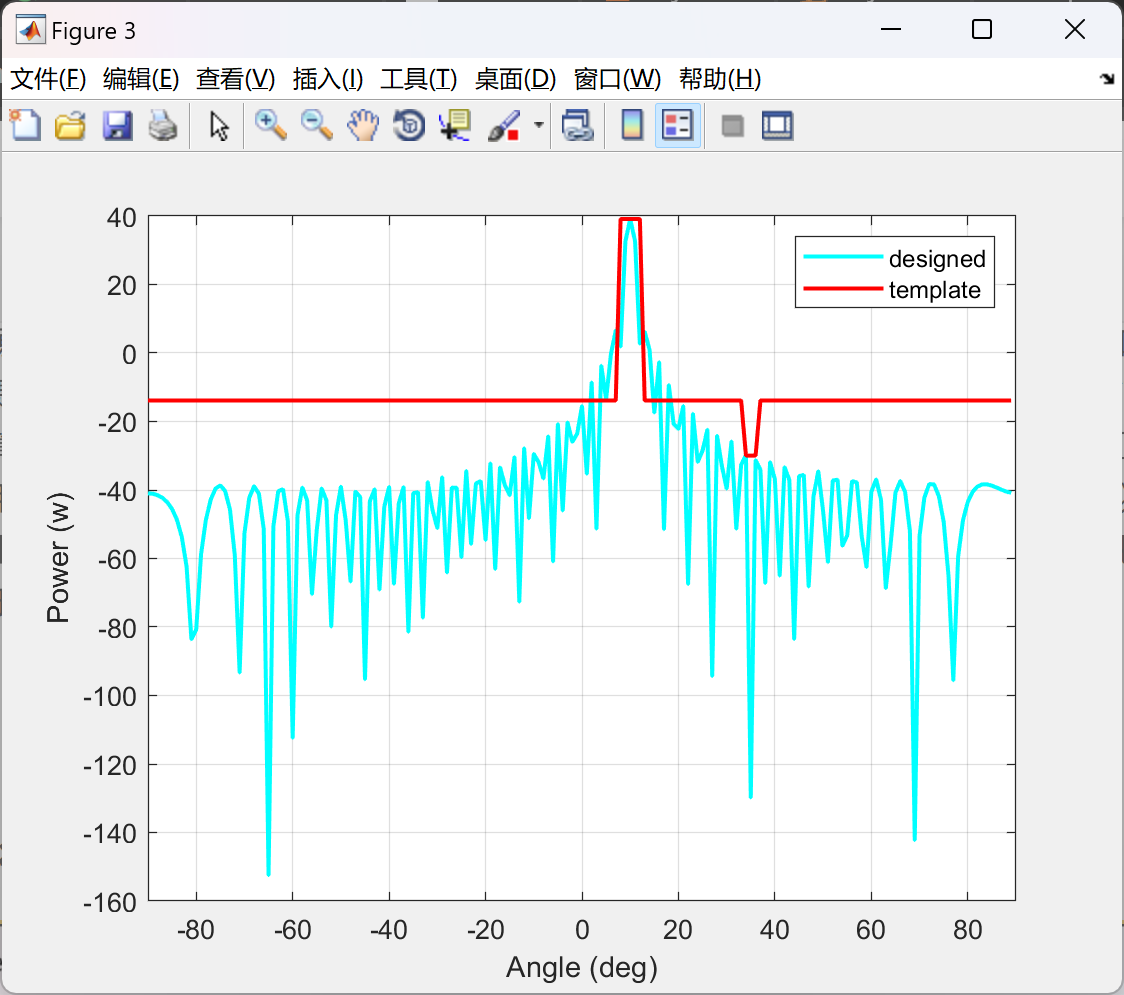
本文考虑了使用相控阵雷达跟踪多目标的联合阵列资源分配和发射波束设计方法。首先,通过解决一个约束优化问题来完成阵列分配,该问题旨在最小化总跟踪克拉美尔-拉奥下界,其中天线数量是一个约束条件。我们通过检查Karush-Kuhn-Tucker条件开发了解决这个问题的过程。基于分配的阵列资源,我们开发了一种具有空间导向能力的新型发射波束设计方法。给定功率预算和空间导向约束,提出了发射信号模型和优化目标函数。结果表明,由于很难解决该问题,因此我们提出了一个循环算法方案来解决它。该方案将优化分为两个问题,其中每个问题转化为更简单的凸问题。最后,采用带惩罚函数的投影梯度下降方法进行具有空间导向的波束形成的最优设计。模拟结果表明,所提出的阵列分配解决方案提供了更好的跟踪精度,并且所提出的波束设计方法在优化波束形成方面优于传统的优化方法,通过在给定方向上实现更深的空间导向和更准确的峰值功率。
然而,上述方法并未考虑空间导向设计问题,而这种设计有许多好处,包括减少拦截器方向的拦截概率,从所选方向拒绝不需要的杂波或干扰源。参考文献(Zarifi、Affes和Ghrayeb,2010)提出了一种新颖的协作空间导向波束形成器,可在均匀分布的无线传感器网络中实现。参考文献(Somasundaram,2012)展示了如何在线性约束的鲁棒Capon波束形成器内应用线性约束,以控制波束图案,塑造主波束并纳入空间导向约束。在(Qian、Sellathurai和Wilcox,2015)中设计了电子可定向寄生阵辐射器的波束形成,用于将波束指向所需方向并将空间导向朝向干扰。参考文献(Babakhani和Sharma,2017)提出了一种新颖的、紧凑的平面三模微带天线,能够进行双空间导向以及有限波束峰值导向。但是,关于发射波束形成的空间导向的研究并未出现。在本研究中,提出了一种空间导向的发射波束形成器,旨在最大化目标方向上接收到的信号功率,同时大幅减少作用于其他方向上的非预期接收器的功率。
与文献不同,本文将多目标跟踪的阵列资源分配和发射波束形成作为两个优化问题进行了联合考虑和制定。本文的贡献可以总结如下:
(1)
建立了用于最小化具有有限天线数量约束的跟踪克拉美尔-拉奥下界(CRLB)的阵列分配问题。通过凸目标函数和仿射约束,为解决约束优化问题开发了Karush-Kuhn-Tucker条件。模拟结果证明,该方法可以高效地分配天线,并实现更高的跟踪精度,特别是对于跟踪多个目标。
(2)
在分配天线之后设计了具有空间导向的发射波束。在此背景下,通过将矩阵的Frobenius范数和复值函数的Chebyshev距离结合起来,引入了一种新的矩阵值函数范数,同时还提供了引入的范数属性的证明。通过使用新开发的范数,将空间导向制定为优化框架中的一个问题。然后,通过循环算法将优化问题分解为两个较简单的问题。
(3)
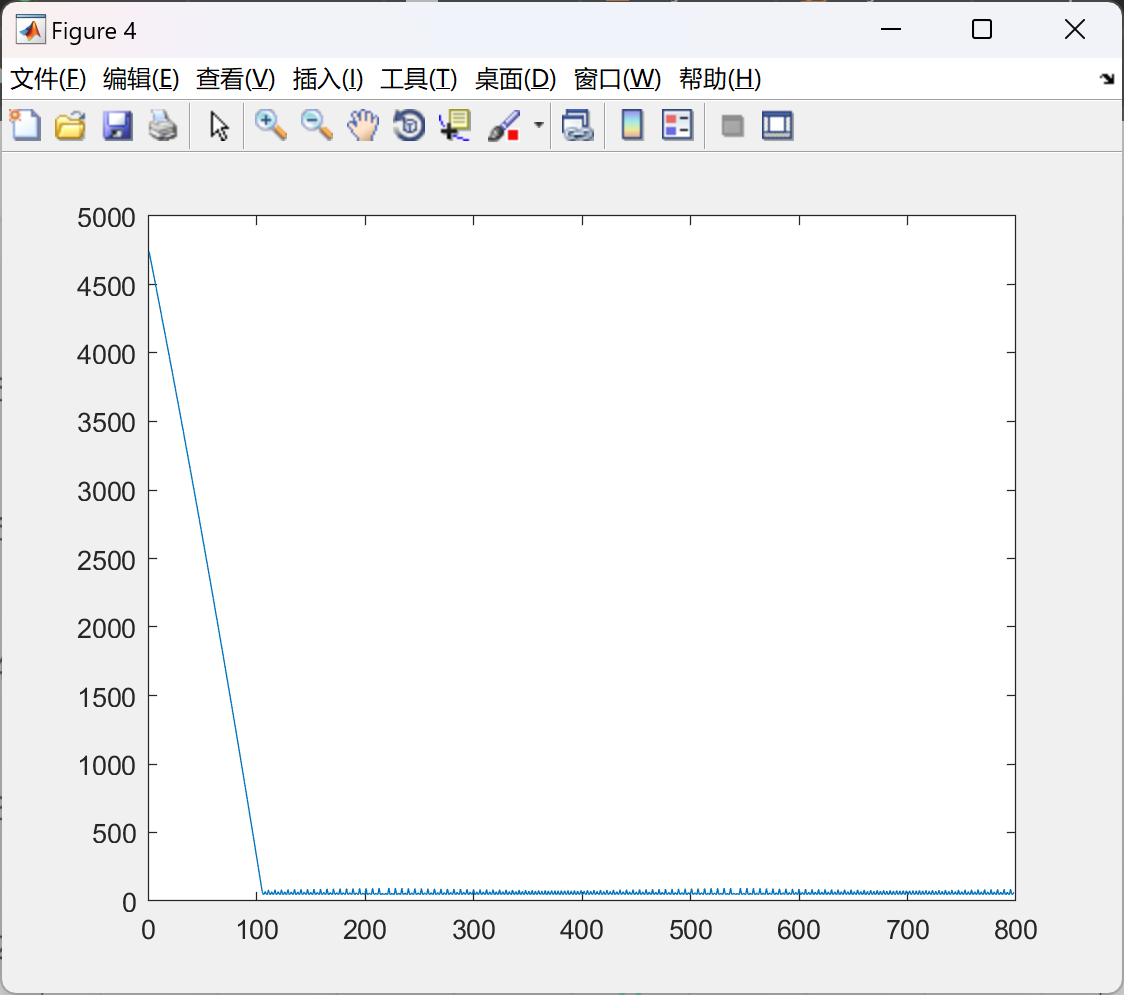
在循环算法之后的一个结果性问题仍然很难直接解决。通过矩阵-向量化,将该问题转化为一个约束二次问题,通过引入惩罚函数来解决该问题。最后,模拟结果还验证了我们的方法在收敛性和波束形成方面均表现更好。
一、相控阵雷达多目标跟踪的技术基础
相控阵雷达通过控制阵列单元的相位和幅度实现波束快速扫描与多目标跟踪(TAS模式),其核心优势包括:
- 波束灵活性:可同时生成多个独立波束,分别执行搜索、跟踪、制导等任务,数据率高达每秒数千次更新。
- 资源动态分配:通过时间-空间-能量资源协同调度,自适应调整波束驻留时间、发射功率及扫描频率,满足不同目标的跟踪精度需求。
- 抗干扰能力:波束形状可控性(如低副瓣设计)降低了虚警率,结合自适应滤波技术可有效抑制杂波和电子干扰。
多目标跟踪的核心挑战包括:
- 数据关联:复杂环境下观测值与目标的匹配问题(如遮挡、虚警)。
- 资源竞争:有限的时间/能量资源需在多个目标间动态分配,需权衡跟踪精度与系统效率。
二、阵列资源分配方法
1. 常见分配策略
- 均匀分配:简单但效率低,适用于低目标密度场景。
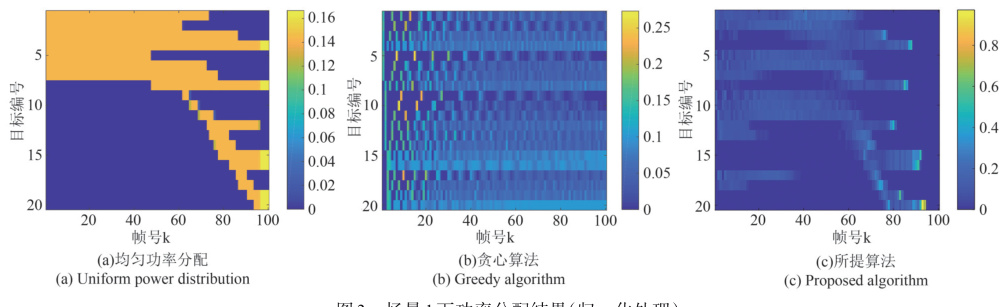
- 贪心算法:局部优化优先高优先级目标,但可能导致资源碎片化。
- 优先级排序:基于目标威胁度、运动状态动态调整资源分配权重。例如,威胁度高的目标分配更多驻留时间和功率。
- 波束复用技术:通过方位角/俯仰角覆盖判断,复用已有波束资源,提升阵面利用率(如全阵/半阵资源动态划分)。
2. 优化模型驱动的分配
- 贝叶斯克拉美罗界(BCRLB) :作为跟踪误差下界,指导功率和带宽联合优化。例如,在频谱共存场景下最小化跟踪误差。
- 两步分解算法:先确定波束指向,再分配驻留时间,解决非凸优化问题。
- 动态威胁度模型:组网雷达根据目标运动轨迹实时调整节点资源分配(如雷达节点1专注目标3,节点2专注目标4)。
三、发射波束设计的关键参数与约束
-
核心参数:
- 波束指向:多波束覆盖角度范围(如五波束设计)。
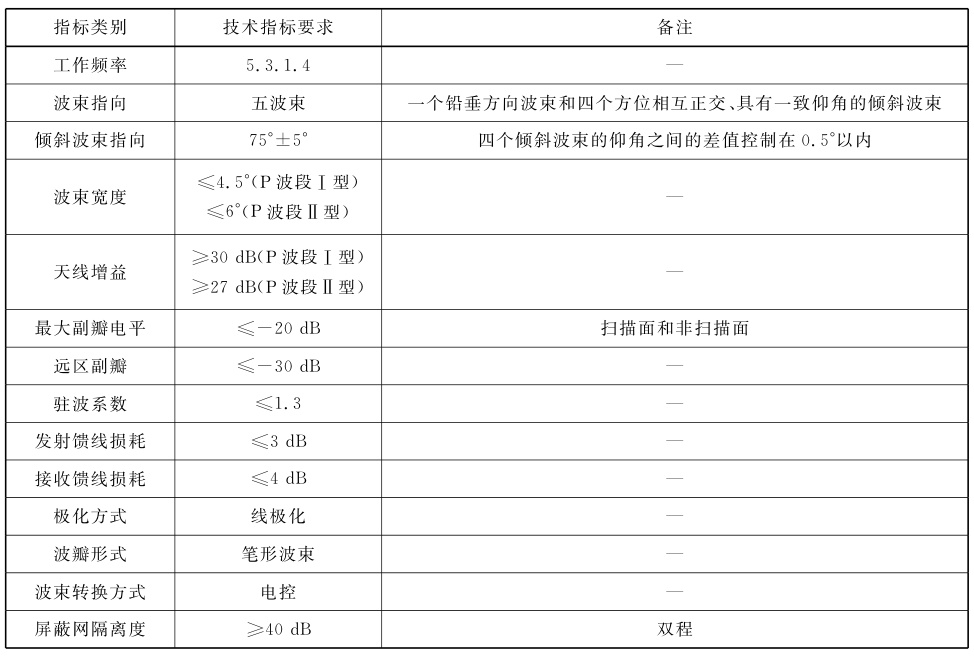
- 波束宽度与增益:窄波束(≤4.5°)提高分辨率,高增益(≥30dB)增强探测距离。
- 副瓣电平:最大副瓣≤-20dB,远区副瓣≤-30dB以降低干扰。
- 极化方式:线极化可兼容不同目标反射特性。
- 波束指向:多波束覆盖角度范围(如五波束设计)。
-
约束条件:
- 能量限制:发射馈线损耗≤3dB,接收损耗≤4dB。
- 实时性:波束转换需电控无惯性,响应时间≤2秒。
四、联合资源分配与波束设计的协同优化
1. 模型构建
- 目标函数:以最小化总驻留时间或最大化能效为目标,结合BCRLB约束跟踪精度。
- 变量整合:同时优化波束权矢量(空时域)、功率分配矩阵及驻留时间。
2. 求解方法
- 交替优化框架:分解为波束成形与资源分配子问题,迭代求解。
- 凸逼近算法:处理非凸二次约束,如可行点追踪-连续凸逼近(FPP-SCA)。
- 粒子滤波结合:基于分配结果动态更新目标状态,提升跟踪鲁棒性。
3. 应用场景
- 频谱共存:联合优化雷达与通信系统功率带宽,减少互扰。
- 动态威胁响应:空时协同波束分配应对高机动目标。
五、典型算法对比与性能评估
| 算法类别 | 代表方法 | 优势 | 局限性 | 适用场景 |
|---|---|---|---|---|
| 固定分配 | 均匀分配 | 实现简单 | 资源利用率低 | 低目标密度 |
| 启发式算法 | 贪心算法 | 局部优化快速 | 全局次优 | 中等复杂度场景 |
| 优化模型驱动 | BCRLB两步分解 | 全局最优,误差可控 | 计算复杂度高 | 高精度多目标跟踪 |
| 协同对抗 | 空时协同波束 | 灵活应对动态威胁 | 需多平台协同 | 电子战环境 |
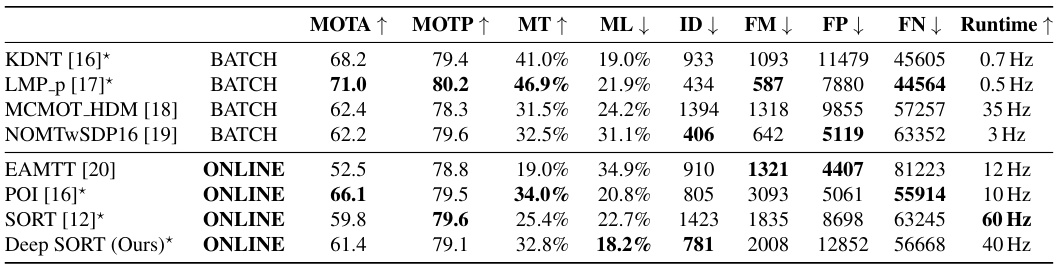
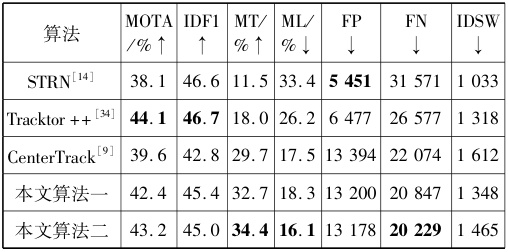
性能指标:
- 跟踪精度:BCRLB误差下界、MOTA(多目标跟踪准确率)。
- 资源效率:总驻留时间、功率利用率。
- 实时性:算法运行频率(Hz)。
六、未来研究方向
- 智能资源调度:结合强化学习动态调整优先级。
- 异构网络协同:组网雷达与通信系统联合优化。
- 抗干扰增强:波束成形与频谱感知融合设计。
- 边缘计算集成:分布式处理降低中心节点负载。
通过上述方法,相控阵雷达在多目标跟踪中实现了资源利用与跟踪性能的平衡,为复杂环境下的实时监控与威胁响应提供了技术支持。
📚2 运行结果
部分代码:
%程序采用PGD
%%目标函数是每个旁瓣点相似度最大最小
%% 约束优化下,本程序是发射多个波形
%% Nesterov Accelerated Gradient
close all
clear all
M=50;
NW=1; %%%波形数为2
%% Calculate the Beam Patterns.
Nsamples1 = 180;
angle1 = -90:180/Nsamples1:90-180/Nsamples1;
% Opt_Beam_Pat = zeros(Nsamples1,1);
Conv_Beam_Pat1 = zeros(Nsamples1,1);
% theta=-40:40;
% lt=length(theta);
% theta=phi_s;
% x0=[x,M-sum(x)];
lambda = 1; % Incoming Signal Wavelength in (m).
d = lambda/2; % Interelement Distance in (m).
phi_s=10; %%%主瓣方向
u_s = (d/lambda)*sin(phi_s*pi/180); % Normalized Spatial Frequency of the Target signal.
v_s = exp(-1i*2*pi*u_s*(0:M-1).'); % Target Steering Vector.
phi_i = 35; % 干扰零线方向
phi=phi_i;
u_i = (d/lambda)*sin(phi_i*pi/180); % Normalized Spatial Frequency of the Target signal.
v_i = exp(-1i*2*pi*u_i*(0:M-1).')/sqrt(M); % Target Steering Vector.
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。


















 943
943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









