






记录一下学习过程,有些步骤不需要看可以直接跳转
目录
一、安装Ubuntu18.04
1.1 下载镜像文件
可以选择在开源网站中下载
或在百度网盘中进行下载
链接:https://pan.baidu.com/s/16WRkWR9XYJuHUjYSEfAdYA
提取码:5thj
1.2 在VMware虚拟机中安装
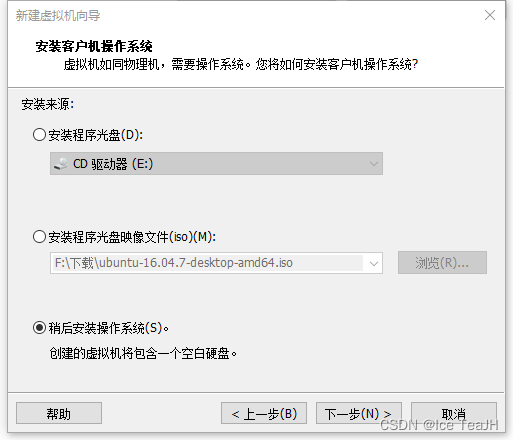
新建一个虚拟机,选择典型

选择稍后安装操作系统(直接选择安装程序光盘映像文件有时在安装时会卡住)
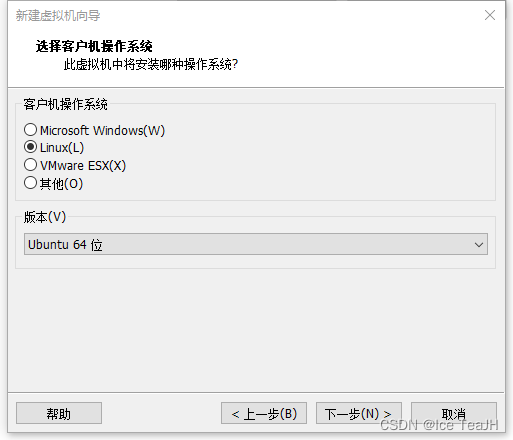
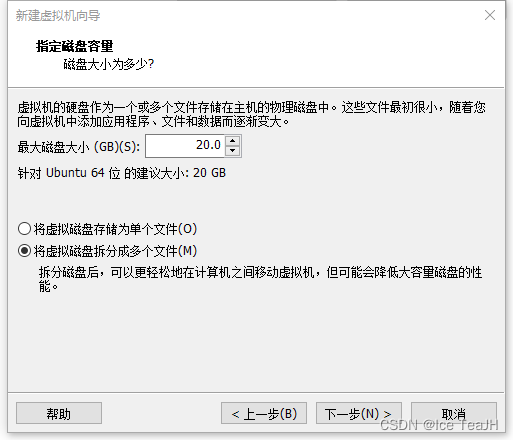
一路下一步
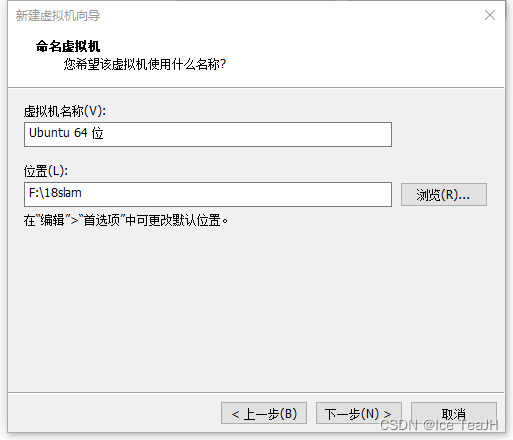
选择安装虚拟机的位置
完成创建后再添加第一步中下载的镜像文件,其他版本也同理,镜像文件换一下就行
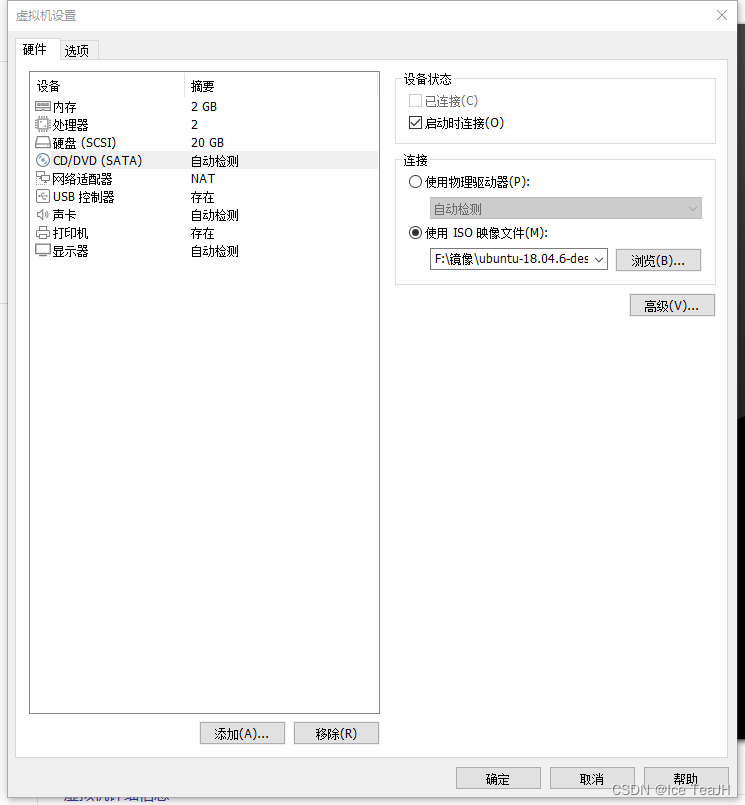
点击编辑虚拟机设置

选择CD/DVD(SATA),将自动检测换为对应的ISO映像文件
点击开启虚拟机,选择语言时左侧框往下拉选择中文(简体),当然要选择English也行,点击安装Ubuntu

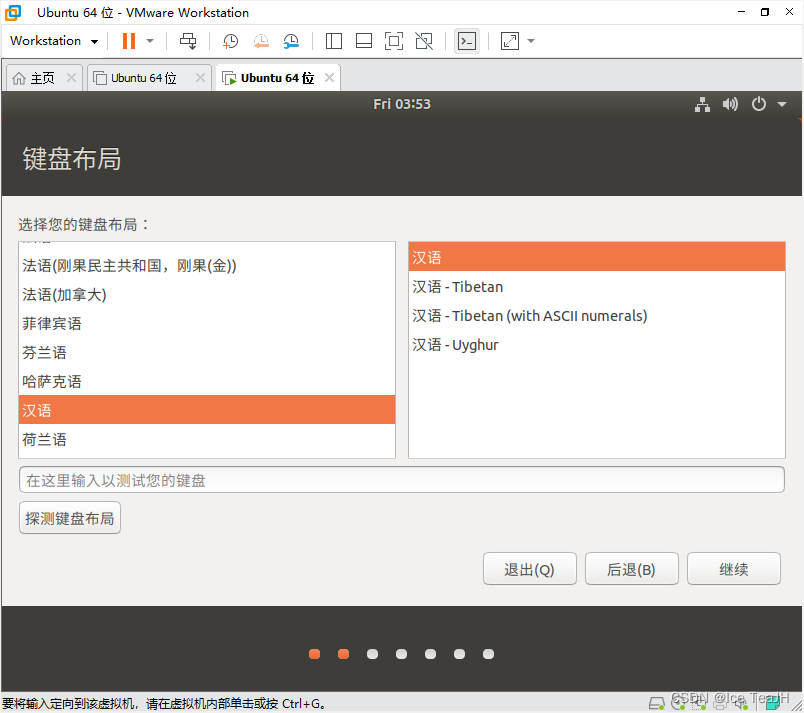
选择键盘布局后点击继续
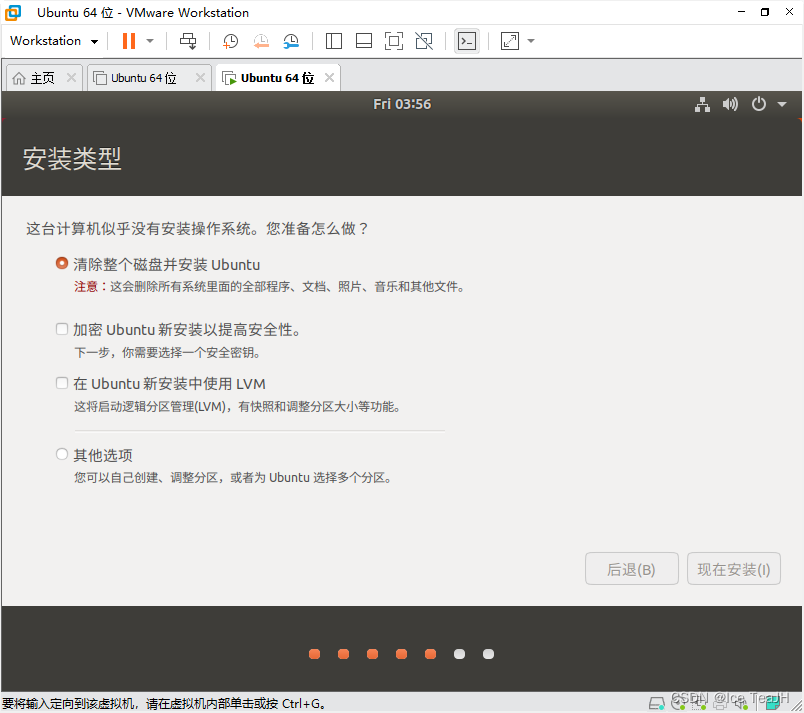
选择正常安装后继续

选择清除整个磁盘并安装Ubuntu,这个选项并不会影响本机的硬盘
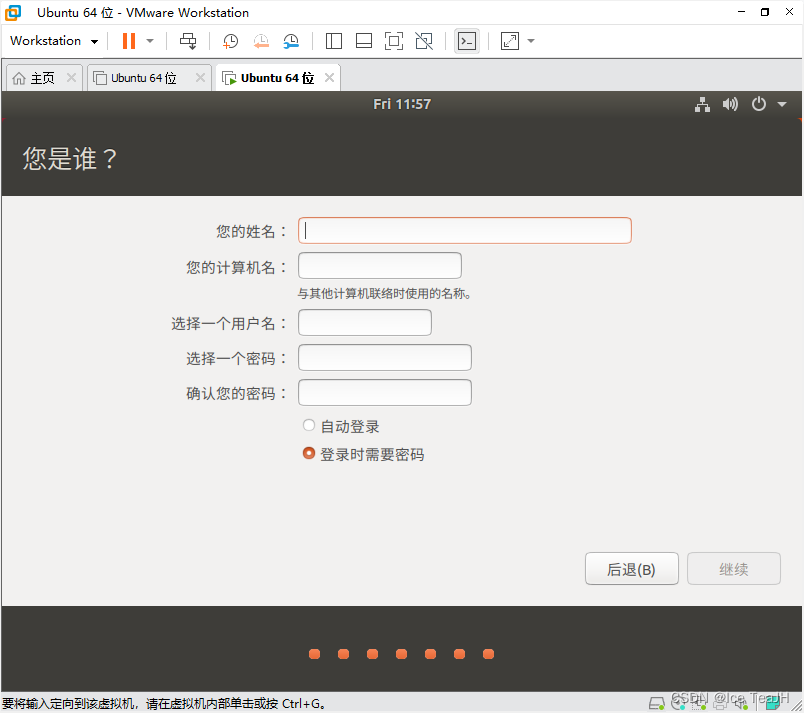
自己设置用户名和密码
然后只需等待安装结束(需要一定的时间),重启虚拟机

1.3 安装VMware Tools
自己可选装或不装,装了方便复制,还能够支持自适应窗口
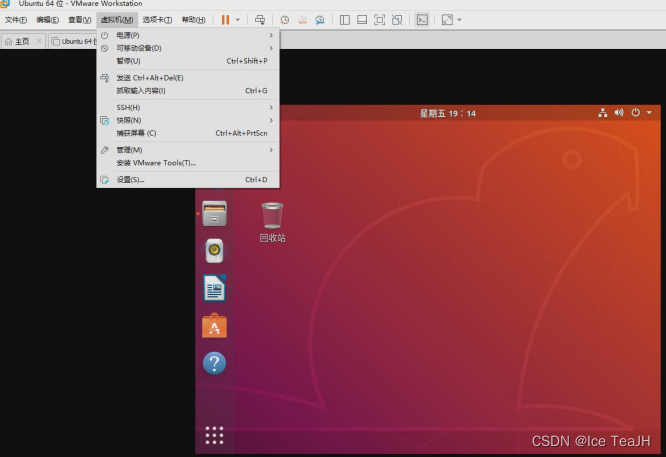
在虚拟机选项中选择安装VMware Tools
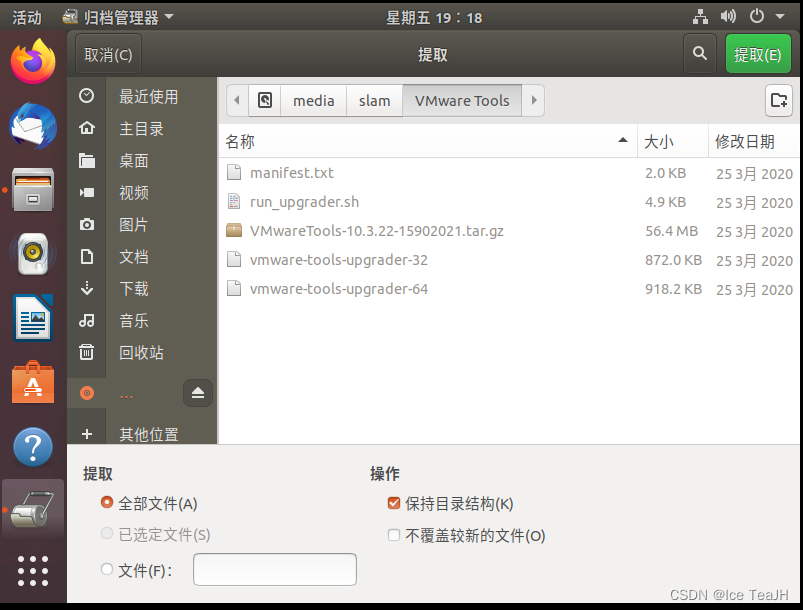
找到对应的文件夹,里面有压缩包(如果找不到压缩包,就先弹出VMware Tools,然后再点击一次安装)

双击压缩包提取
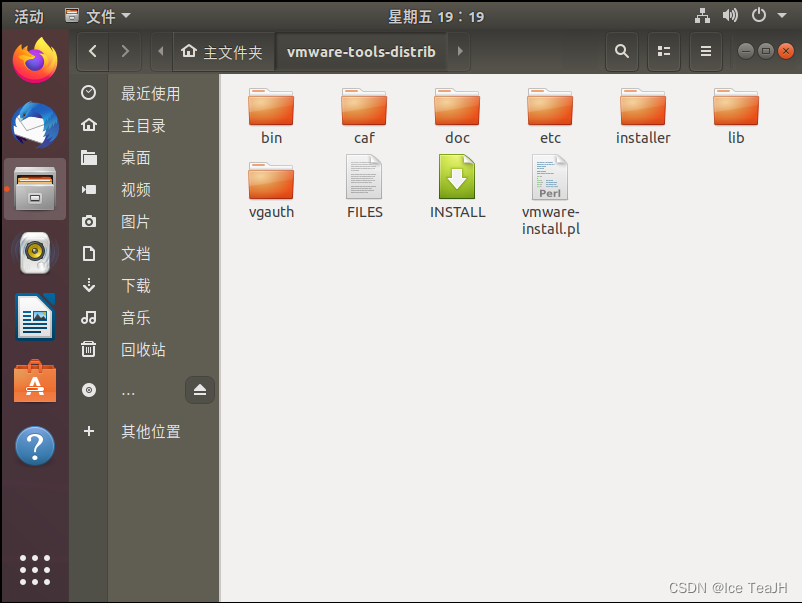
在提取出的文件夹中打开终端(或者cd到提取的文件夹)
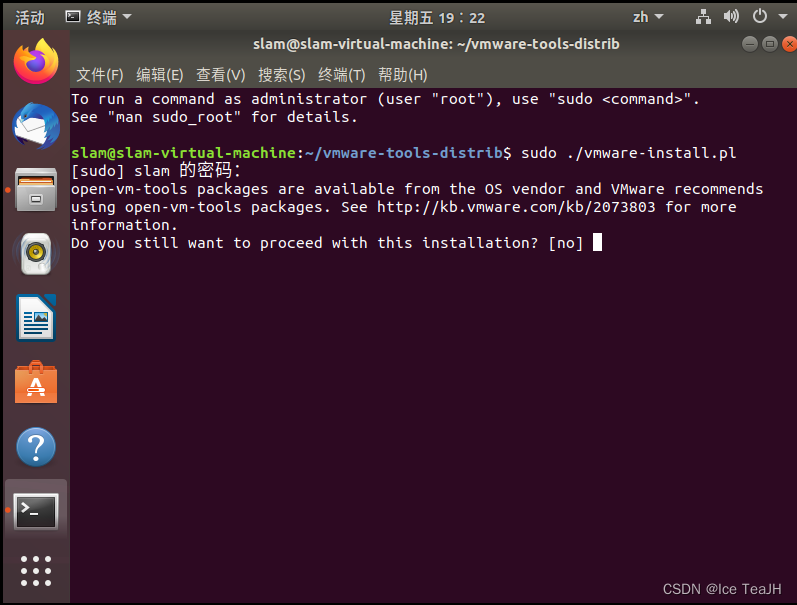
执行下载程序(需要输入秘密)
sudo ./vmware-install.pl进入安装过程后根据提示输入(基本上都是yes或直接回车)
安装完成后重启虚拟机
二、安装ORB-SLAM3
2.1 安装Pangolin
更新本地软件包索引(方便后续)
sudo apt-get update使用默认软件包安装git(也有其他方法,选择一种安装就行)
sudo apt-get install git
安装一些依赖
sudo apt install libglew-dev
sudo apt install cmake
sudo apt install libpython2.7-dev从git上拷贝pangolin源码并安装
git clone https://github.com/stevenlovegrove/Pangolin.git编译pangolin
cd Pangolinmkdir buildcd buildcmake ..cmake安装成功后,但也有可能报错,我的报错执行以下代码后顺利解决(本文只记录了我的报错)
sudo apt-get update
sudo apt-get install -y build-essential编译的时候可能会报错,有可能是eigen3未安装
![]() 执行以下指令就能解决
执行以下指令就能解决
sudo apt-get install libeigen3-devcmake --build .编译完成

sudo make install2.2 安装 OPENCV
由于之前装过ROS,使用的都是opencv3.4.2,本文安装的opencv版本也为3.4.2
下载opencv压缩包(其他版本换最后的版本号就能下载)
https://codeload.github.com/opencv/opencv/tar.gz/refs/tags/3.4.2
安装一些依赖
sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
如果在windows系统下载,直接复制进虚拟机里面,双击提取,进入解压出的文件夹后打开终端
mkdir buildcd build经过上面的步骤,cmake一般不会报错
cmake ..makesudo make install将opencv库添加到路径中,使用gedit或vim都行。
sudo gedit /etc/ld.so.conf.d/opencv.conf添加
/usr/local/lib再执行
sudo ldconfig 配置bash
sudo gedit /etc/bash.bashrc添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
再执行
source /etc/bash.bashrc2.3 安装BOOST
下载代码:Boost Downloads
在虚拟机中解压
tar -xvf boost_1_80_0.tar.bz2进入解压出的文件夹运行bootstrap.sh:
cd ./boost_1_80_0
./bootstrap.sh安装
sudo ./b2 install2.4 安装编译ORB-SLAM
将源码的zip包下载下来:ORB-SLAM3下载地址
在解压的文件夹中执行
sudo gedit build.sh 打开这个文件
将所有 make -j 改为 make -j4
保存文件后执行:
chmod +x build.sh编译
./build.sh这一步可能会遇到较多的问题,此处列举我所遇到的问题
问题:
- OPENCV>4.4not found
![]()
找到
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()换成
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3 REQUIRED)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
- 遇到fatal error: boost/serialization/serialization.hpp: No such file or directory

执行
sudo apt install libboost-filesystem-dev
(后续可能再补充其余的问题和数据集实验方面的记录)














 2545
2545











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









