







最近看论文,发现论文中有通过黑塞(Hessian)矩阵提高电驱系统稳定性的应用。所以本篇主要从Hessian矩阵的性质出发,对其中正定矩阵的判定所引发的想法进行记录。
(其实看论文出现黑塞很惊奇,因为前不久刚读了作家黑塞的《德米安:彷徨少年时》,所以在这一领域的黑塞也做个记录吧。。)
首先,我理解的Hessian矩阵是对一个多元函数求最优的方法,百度百科上这样记载的:
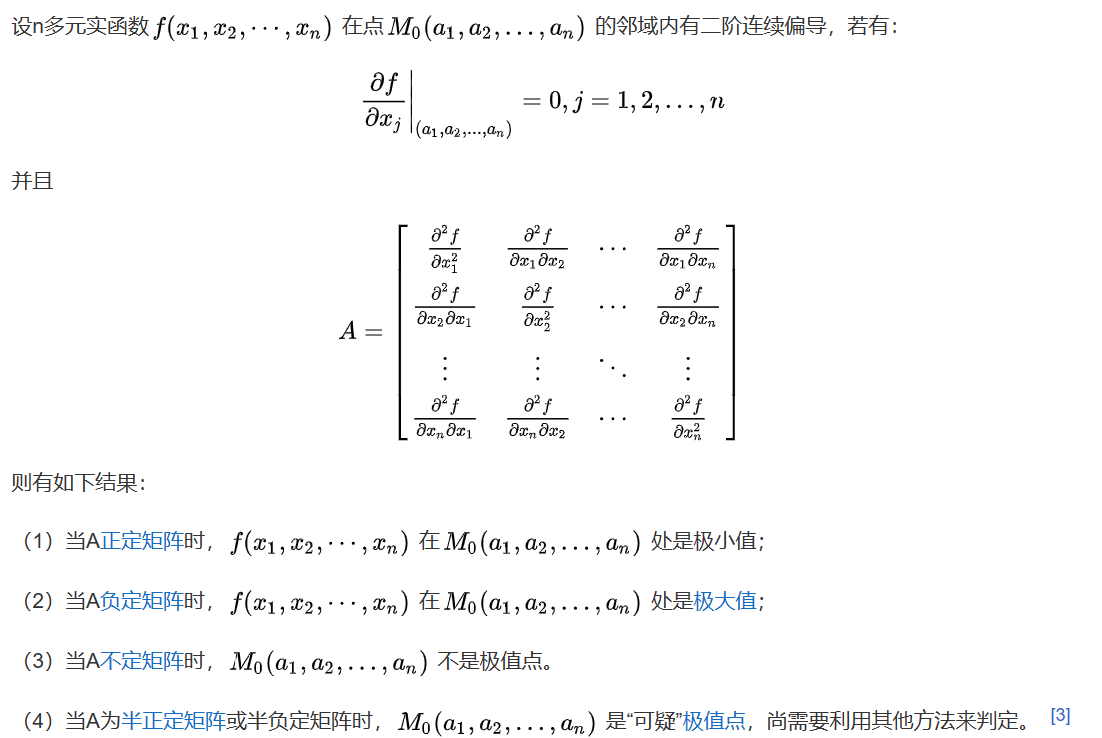
图1 百度百科上关于Hessian矩阵的表述图
我们最关注的是求极小值求最优的问题,所以,对正定矩阵的判定是一个重点。
我们已知的“如何判定一个矩阵为正定矩阵?”有以下几点:
矩阵特征值均大于0;
各阶行列主子式均大于0;
主元(pivots)均大于0,其中主元的乘积就是行列式的值;
二次型
 恒大于0。
恒大于0。
前三点都比较容易理解,问题就是计算量大。我们重点关注第四点,举个例子:(来源MIT 18.06 linear algebra)
矩阵A表示为:

其二次型表示为:

现在问题转化成了,“如何判定这个二次型恒为正呢?”有以下几点:
一阶导数=0,二阶导数>0;
配方,
 >0;
>0;
矩阵A正定,其二次型恒为正(这。。世界是一个圆嘛。。)
联系起来,其实质就是:
特征向量表明主轴的方向,特征值表明轴的长度,>0正方向走,<0反方向走;
求二阶导数大于0就等价于在求行列式的值大于0;
配方就是在消元,即求A的LU分解,配方项前的系数2、2,就是主元大于0。
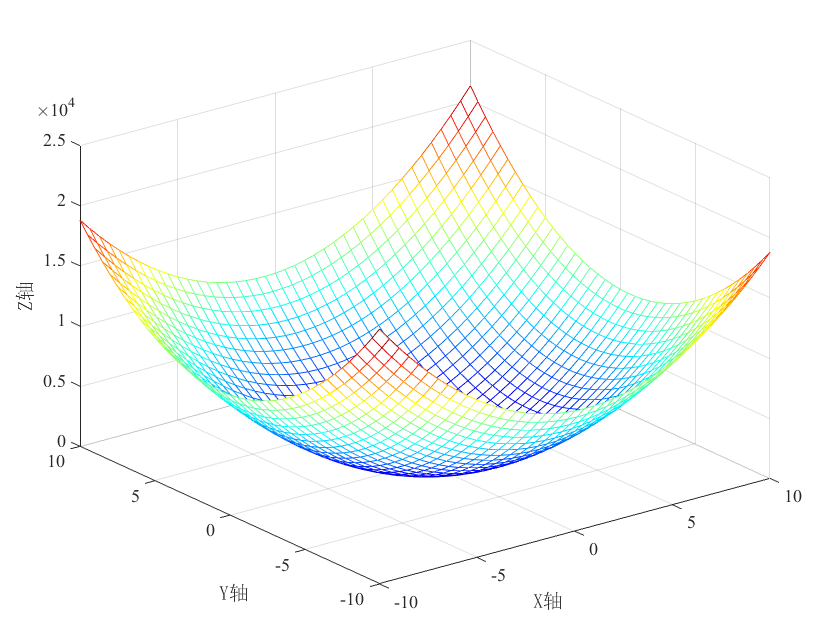
最后总结一下:用空间力来想,看下图,在一个xyz的三维空间内,令z=1即上述二次型式子=1。如果横切后得到的是椭圆,即函数在空间上为一个开口向上的碗状,则证明二次型存在极小值且矩阵正定;如果横切后得到的是双曲线,即函数在空间上为马鞍形,则证明二次型存在鞍点但不存在极小值点且矩阵不是正定的。这也就是为什么说:
椭圆与正定相关,双曲线与正定无关。
同样的,扩展到四维,切出来的三次型就是一个三维橄榄球了。。
|

|
为了便于观察,所绘制三维图与例子里的非同一函数
如果此篇文章对您有帮助,记得评论区告诉我: )
您的点赞和收藏是对写作者最大的鼓励!














 1541
1541











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









