







 本文对比了串级PID与单极PID在控制小车位置和平衡小车速度控制上的应用,阐述了串级PID的抗干扰能力和稳定性优势。通过具体案例解释了串级PID如何根据电机实际速度做出调整,以及如何辅助平衡小车保持静止。总结了在系统复杂或需要增强稳定性时,考虑使用串级PID的策略。
本文对比了串级PID与单极PID在控制小车位置和平衡小车速度控制上的应用,阐述了串级PID的抗干扰能力和稳定性优势。通过具体案例解释了串级PID如何根据电机实际速度做出调整,以及如何辅助平衡小车保持静止。总结了在系统复杂或需要增强稳定性时,考虑使用串级PID的策略。
前言
本文将讲述串级PID与单极PID的区别,并由此引出什么时候用串级PID,对于想深入学习PID的你有一定的帮助。
以下是本篇文章的正文内容
一、什么是串级PID
上一个PID的输出量作为下一个PID的输入量,两个PID构成的就是串级PID。串级有点像电路中的串联。
注意不是有两个PID就是串级,它们可能是并行的,即两个PID都同时作用到控制器中。串级PID只有一个PID作用到控制器,另外的PID只是起传递作用。两种形式的作用效果有很大区别。
二、串级PID与单极PID比较
本小节主要分析串级PID相比于单极PID的优势。串级PID的优势是系统抗干扰能力强,稳定性好,下面举两个例子说明。
1.控制小车开到某一位置。
单极PID偏差是目标位置与当前位置的差值。由PID输出PWM控制电机角速度,一般情况下小车可以顺利到达目标位置。在水平面单极PID让电机以速度v转动,电机可以转动相应的v。但是如果地面是倾斜的,这时阻力会增大,电机就不会达到速度v,而PID还不舍得增加输出值。为解决这个问题,我们可以让电机实际速度与目标速度的差值作为偏差添加一个新的PID,第一个PID根据位置偏差计算出需要的速度传递给第二个PID,第二个PID根据电机的实际转速反馈输出合适的PWM给电机,由此组成一个串级PID。如下图所示。
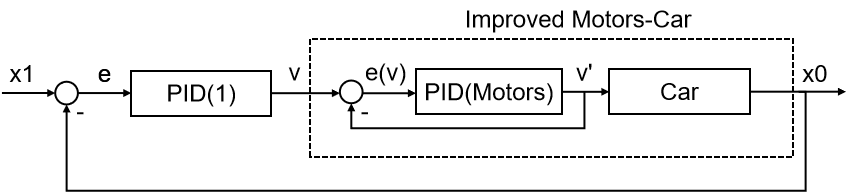
即使地面时倾斜的,串级PID也可以根据电机实际速度做出调整。
2.平衡小车速度控制
对于平衡小车一般都把速度控制为0。这里的速度控制是正反馈,当用手推小车,直立控制下小车会前进,如果此时让电机反转,小车由于惯性会倒下。所以速度控制要让小车以更快的速度行驶,这时小车倾斜方向相反,直立控制使小车反向运动,连续控制下小车最终速度为0。
速度控制实际上是对直立控制的角度修正,辅助直立控制。这时可以使用串级PID控制,控制原理如下图所示。
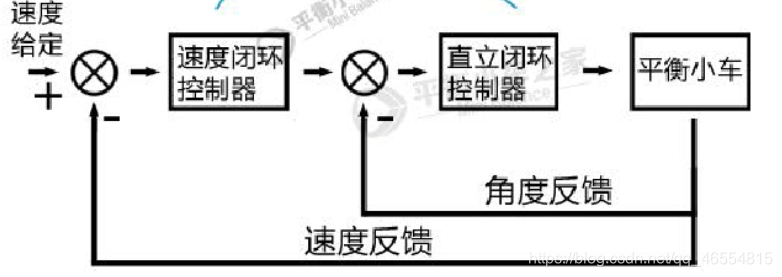
串级PID能让小车长时间保持静止,单独的直立控制在受到干扰以及重心不稳的情况下会朝一个方向加速。实际应用中也可以不用串级PID,直接使用叠加式的并行PID,但需要对速度控制进行低通滤波,即削弱速度控制的效果,让平衡控制占主导地位,达到的效果与串级PID相似。可见引入串级PID的缺点只是增加系统运算量。
三、什么时候用串级PID
只能说根据系统进行物理分析,不断调试。
当系统出现一个以上PID作用于同一个控制器时最好使用串级PID。
当系统只有一个PID,根据系统受干扰程度,考虑要不要加个PID用串级PID。
结语
那么以上就是本篇文章的所有内容了。
本文如果有什么不对的或者需要改进的地方欢迎指出。


















 7630
7630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











