






 本文详细介绍了QGC界面中的关键功能,包括飞行工具栏的指示器、飞行高度框的MapScale功能、航点添加、电池状态监测、飞行模式切换以及飞行震动查看。这些功能对于有效控制无人机、规划飞行任务和确保飞行安全至关重要。
本文详细介绍了QGC界面中的关键功能,包括飞行工具栏的指示器、飞行高度框的MapScale功能、航点添加、电池状态监测、飞行模式切换以及飞行震动查看。这些功能对于有效控制无人机、规划飞行任务和确保飞行安全至关重要。
目录
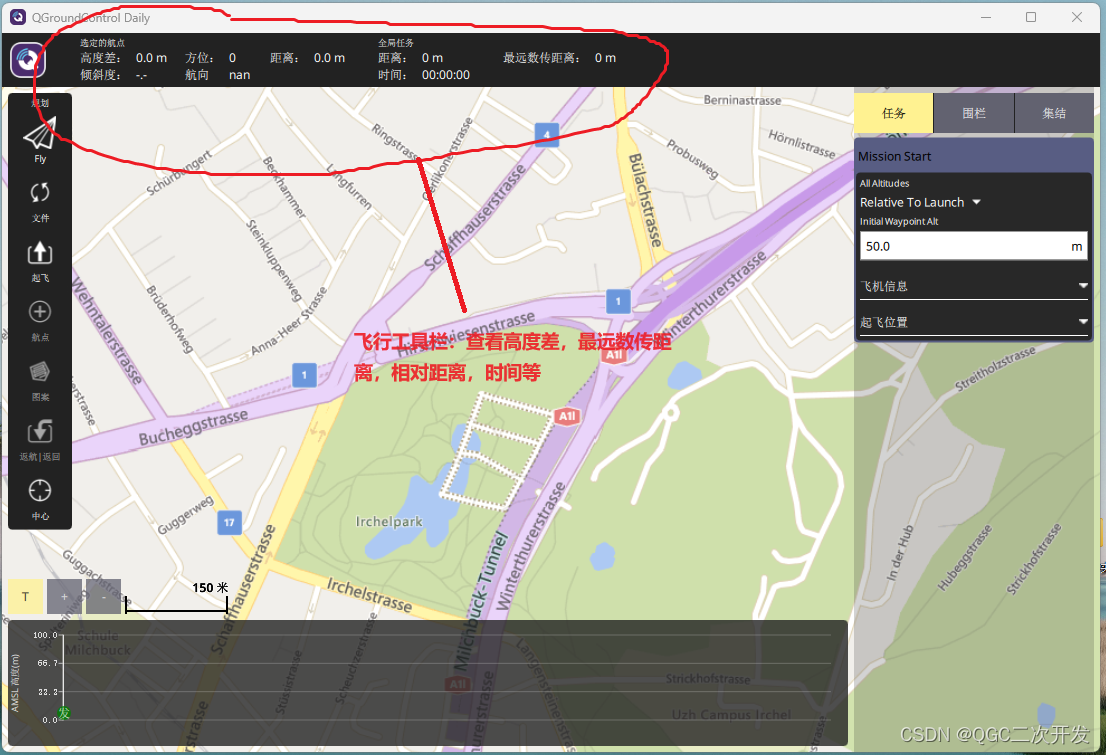
一.飞行工具栏
1.代码位置:
src\PlanView\PlanToolBarIndicators.qml
2.功能介绍:
1.距离指示器:显示当前飞行器到目标点的距离,帮助用户了解飞行器与目标点之间的距离,以便做出相应的飞行调整。
2.航向指示器:显示当前飞行器的航向角度,指示飞行器当前的飞行方向,帮助用户确保飞行器按照预定航线飞行。
3.高度指示器:显示当前飞行器的高度信息,帮助用户监控飞行器的飞行高度,确保飞行器在安全高度飞行。
4.速度指示器:显示当前飞行器的速度信息,帮助用户控制飞行器的飞行速度,确保飞行器按照预定速度飞行。
5.航点指示器:显示当前飞行任务中的航点信息,帮助用户了解飞行器即将到达的下一个航点,以便做出相应的飞行控制。
6.最远数传距离:了解最远数传距离可以帮助用户确定飞行器的控制范围。当飞行器超出最远数传距离时,可能会导致信号丢失或不稳定,影响飞行器的操控和安全。
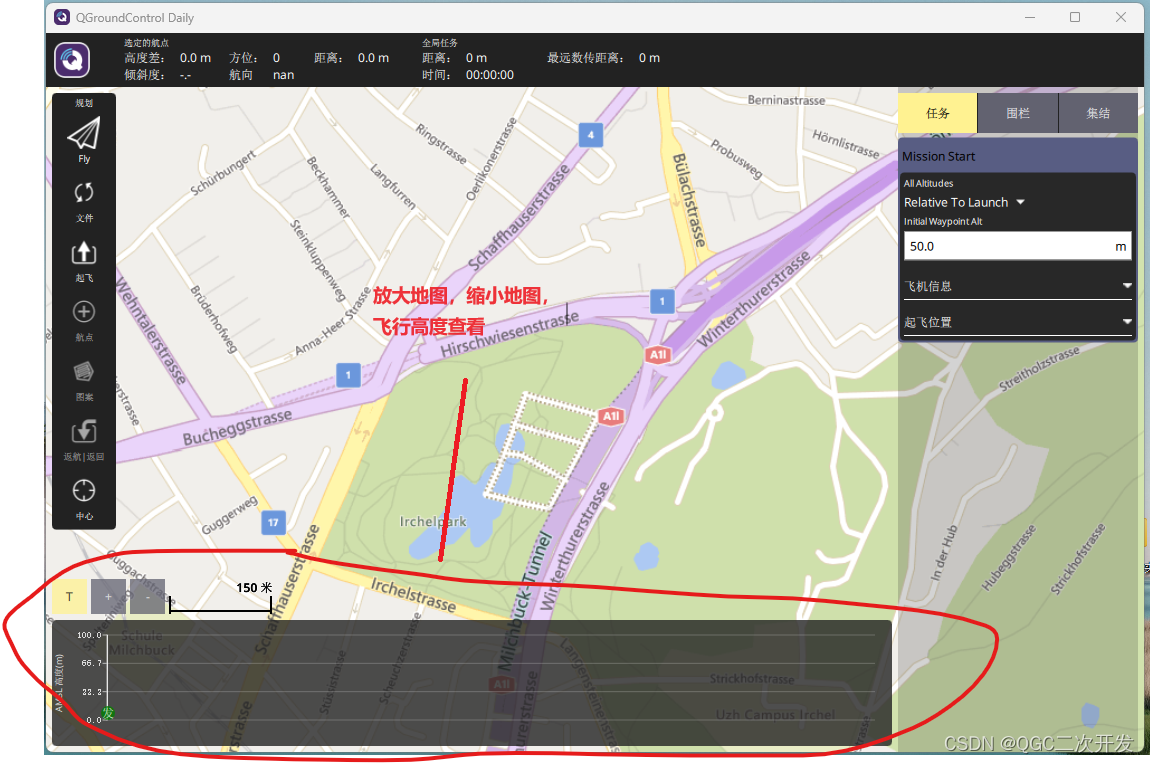
二.飞行高度框
1.代码位置:
src\FlightMap\MapScale.qml
2.功能介绍:
MapScale的作用是调整地图的显示比例尺,允许用户根据需要放大或缩小地图,以便更清晰地查看无人机周围的环境细节或者获取更大范围的视野。
1.提供地理信息:地图可以显示地形、地貌、道路、建筑等详细信息,帮助飞手了解无人机的位置和周围环境。
2.调整显示比例:通过改变比例尺,用户可以在不同的缩放级别查看地图,从而获得不同详细程度的地理信息。
3.无需互联网:QGC支持离线地图,这意味着即使没有网络连接,用户也可以使用地图功能。
4.辅助飞行规划:通过适当调整MapScale,飞手可以更好地规划飞行路线,避开障碍物,确保飞行安全。
5.分析数据:在执行飞行任务后,飞手可以在地图上标注特定点或路径,以分析飞行数据和结果。
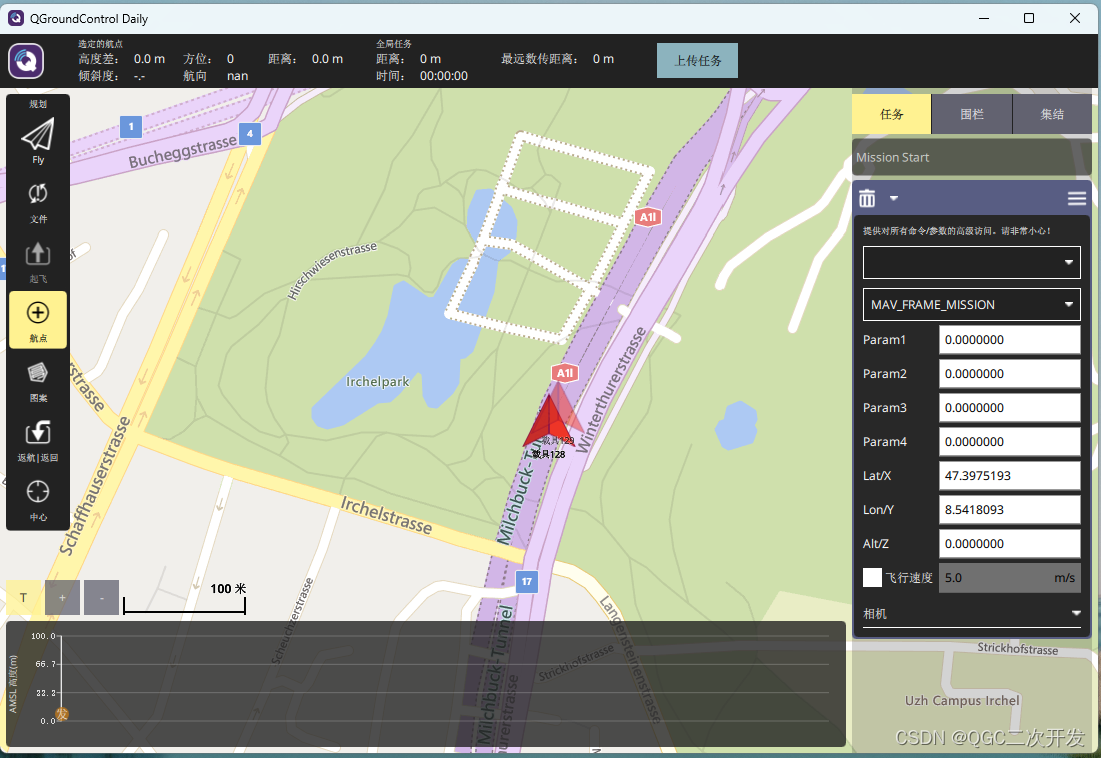
三.添加航点
添加航点的作用是规划和执行自动飞行任务,它允许用户通过在地图上添加航点来规划复杂的飞行任务。这些航点定义了无人机在执行任务时需要飞越的具体位置。一旦航点被设置,无人机可以自动飞往这些预设的位置,无需飞手实时操作遥控器。
1.点击航点按钮:在QGC的界面上找到航点(Waypoint)相关的按钮或菜单项。
2.在地图上添加航点:通过在地图上的特定位置点击,可以添加一个航点。这通常涉及到将鼠标当前位置转换为经纬度坐标。
3.编辑航点信息:在添加航点后,可以对航点的高度、速度、飞行角度等参数进行编辑,以满足特定飞行任务的需求。
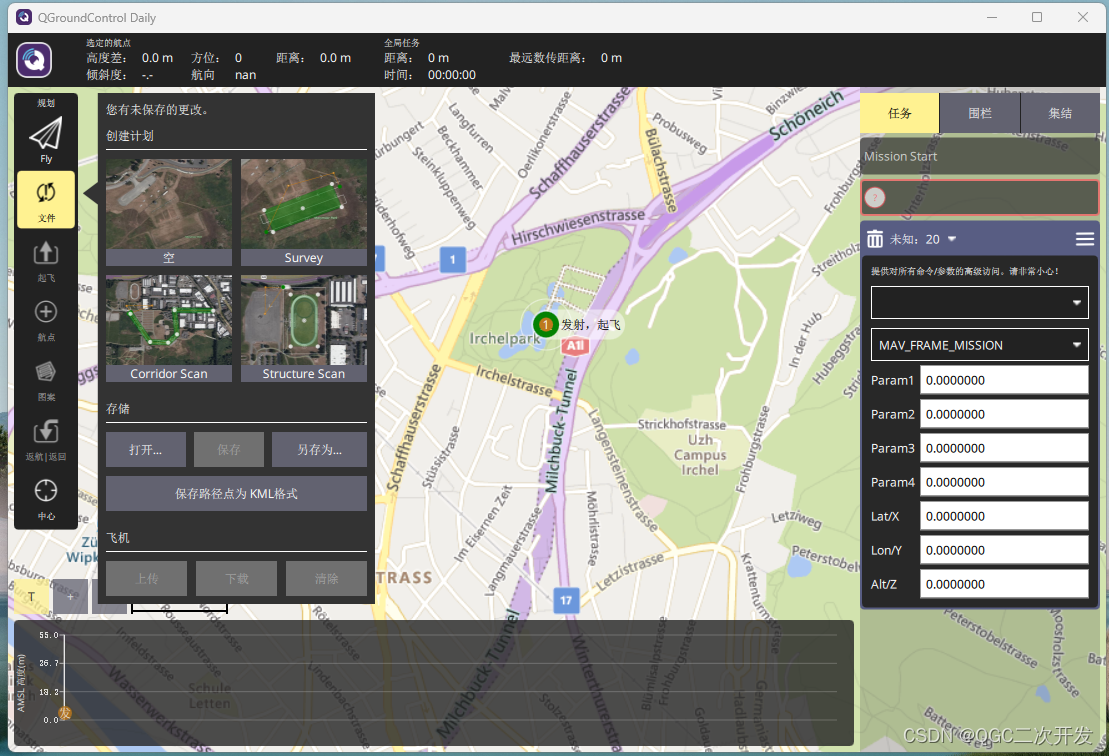
4.规划飞行路径:将所有添加的航点连接起来,形成一个完整的飞行路径。这个路径可以是直线也可以是曲线,取决于任务需求和飞行环境。
5.预览飞行路径:在执行飞行任务之前,可以使用QGC的预览功能来查看整个飞行路径,确保所有航点都已正确设置并且路径合理。
6.上传飞行任务:一旦航点设置完成,可以选择上传飞行任务。
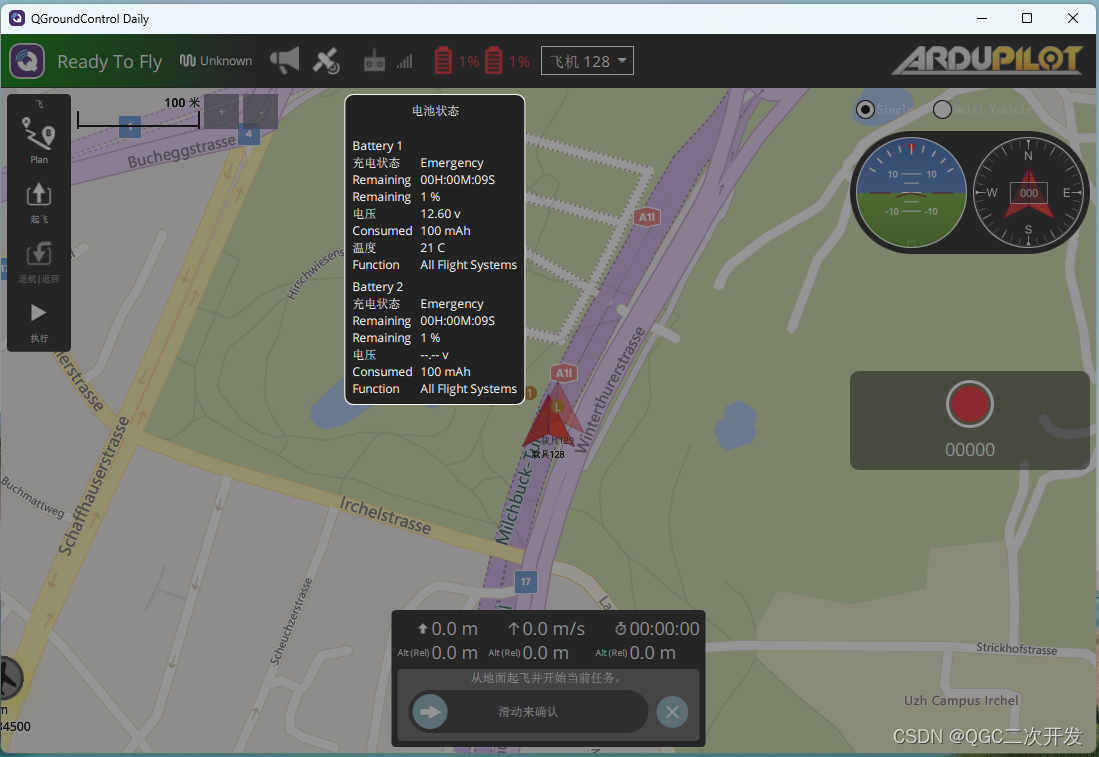
四:查看电池状态
电池状态的作用是实时监控无人机的电池电量和健康状况,它直接关系到无人机的飞行安全和续航能力。
1.监控电量:电池状态可以显示当前的电量百分比,帮助飞手了解无人机剩余的可飞行时间,以便在电池耗尽前及时返航或更换电池。
2.健康状态:除了显示电量,电池状态还可以反映电池的整体健康状况,包括电压、电流、温度等关键指标,这些信息对于预防电池故障和延长电池寿命至关重要。
3.预警系统:QGC可以通过电池状态的监控来提供低电量警告,提醒飞手采取必要措施,避免因电量不足导致的坠机事故。
4.飞行规划:了解电池状态有助于飞手在规划飞行任务时做出合理的决策,比如根据电池续航选择合适的飞行路线和拍摄点。
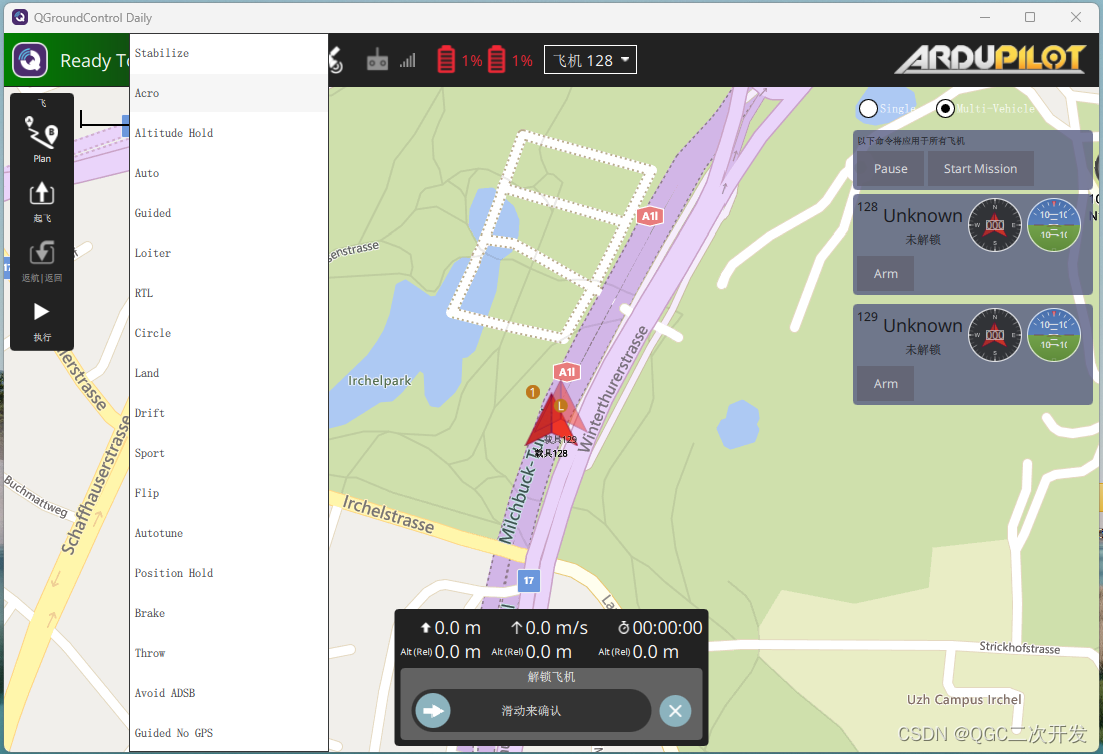
五.模式切换:
选择飞行模式是根据无人机执行的任务类型和飞行环境来配置无人机的飞行行为,它们可以根据飞行任务的性质和环境条件选择最合适的飞行模式,以确保无人机的安全飞行和任务的有效执行。
1.手动模式:这是无人机最基本的飞行模式,通常用于手动操控无人机进行飞行。在这个模式下,无人机的控制权完全交给飞行员,需要飞行员通过遥控器来控制无人机的每一个动作。
2.稳定模式(Stabilized):这种模式下,无人机会保持当前的水平位置和高度,使得飞行员可以更容易地进行悬停和拍摄等操作。
3.自动模式:在自动模式下,无人机可以根据预设的航线自动飞行,适用于执行如自动巡航、航点飞行等任务。
4.姿态模式(Acro):这个模式给予了飞手最大的操控自由度,允许进行特技飞行和复杂的空中机动。在这种模式下,飞机的姿态和移动完全由飞手通过遥控器控制。
5.直升机模式:这种模式类似于姿态模式,但特别适用于那些设计用来执行复杂任务和特技飞行的无人机。
6.定高模式:在这个模式下,无人机会保持在一个固定的 altitude 高度,对于需要在空中停留并进行特定操作的任务非常有用,如摄影或视频拍摄。
7.返航模式:当无人机电量低或者丢失信号时,返航模式会被激活,无人机会自动返回起飞点。
8.跟随模式:这种模式下,无人机会自动跟随移动的目标,通常用于追踪拍摄或特定任务。
9.路径规划模式:在这个模式下,无人机会沿着预先设定的路径进行飞行,这对于进行地图测绘或区域检查等任务非常有用。
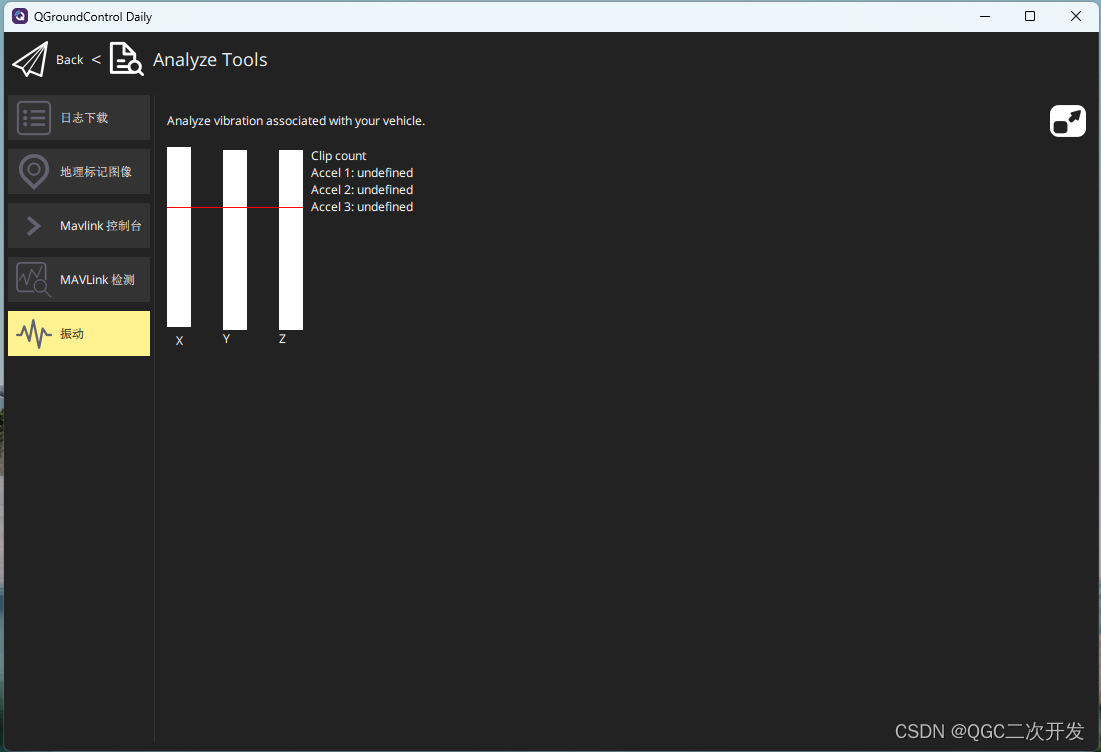
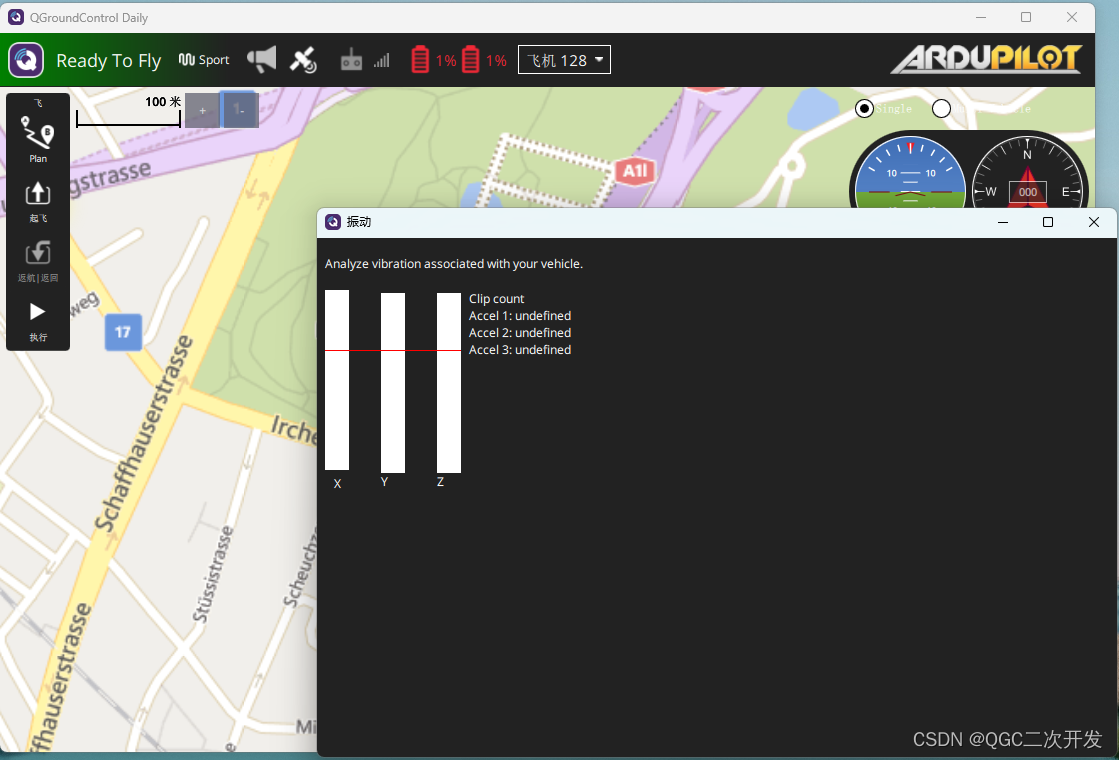
六.飞行震动查看:
飞行震动通常是指无人机在飞行过程中遇到的不稳定因素,这些震动可能会影响飞行稳定性和拍摄质量,查看飞行震动的作用是监控无人机的飞行稳定性和安全性。
1.实时监控:通过QGC的飞行界面,飞手可以实时查看无人机的飞行数据,包括震动情况。这有助于飞手了解无人机当前的飞行状态,及时发现可能的问题并采取措施。
2.传感器校准:QGC提供了传感器校准的功能,包括罗盘、陀螺仪和加速度计等。通过校准,可以减少由于传感器误差引起的飞行震动,从而提高飞行精度和稳定性。
3.故障诊断:如果飞行震动超出正常范围,这可能是无人机某些部件出现故障的信号。通过QGC监控震动,可以帮助飞手诊断问题,比如检查螺旋桨是否损坏或是否需要更换部件。
4.任务规划:在执行特定任务时,如拍摄或测绘,减少震动对于获取高质量的数据至关重要。QGC可以帮助飞手规划飞行路径和参数设置,以减少震动并提高任务执行的质量。
5.安全返航:如果飞行震动过大,可能会影响到无人机的安全返航。QGC允许飞手控制飞机进入安全返航模式,确保即使在异常震动情况下也能安全返回。















 2479
2479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









