






目录
一.总结概况
1.代码位置:
D:\tim-u30\tim-u30\src\VehicleSetup\VehicleSummary.qml
2.功能介绍:
1.基本信息:如机架、型号、版本号、序列号等,这些是车辆的基本识别信息。
2.传感器数据:可能包括GPS定位、气压计、陀螺仪、加速度计等传感器的读数,这些数据对于了解车辆的实时状态至关重要。
3.连接状态:连接到遥控器、飞行器、地面站的状况,如Wi-Fi、蓝牙或串口连接。
4.电池信息:电池电压、剩余电量、充电状态等,这对于飞行安全和任务规划非常重要。
5.配置参数:车辆的飞行模式、航向控制方式、通信设置等关键设置,这些设置可能影响飞行性能和操作方式。
6.警告和错误:任何与车辆设置相关的错误或警告信息,帮助用户快速识别并解决可能的问题

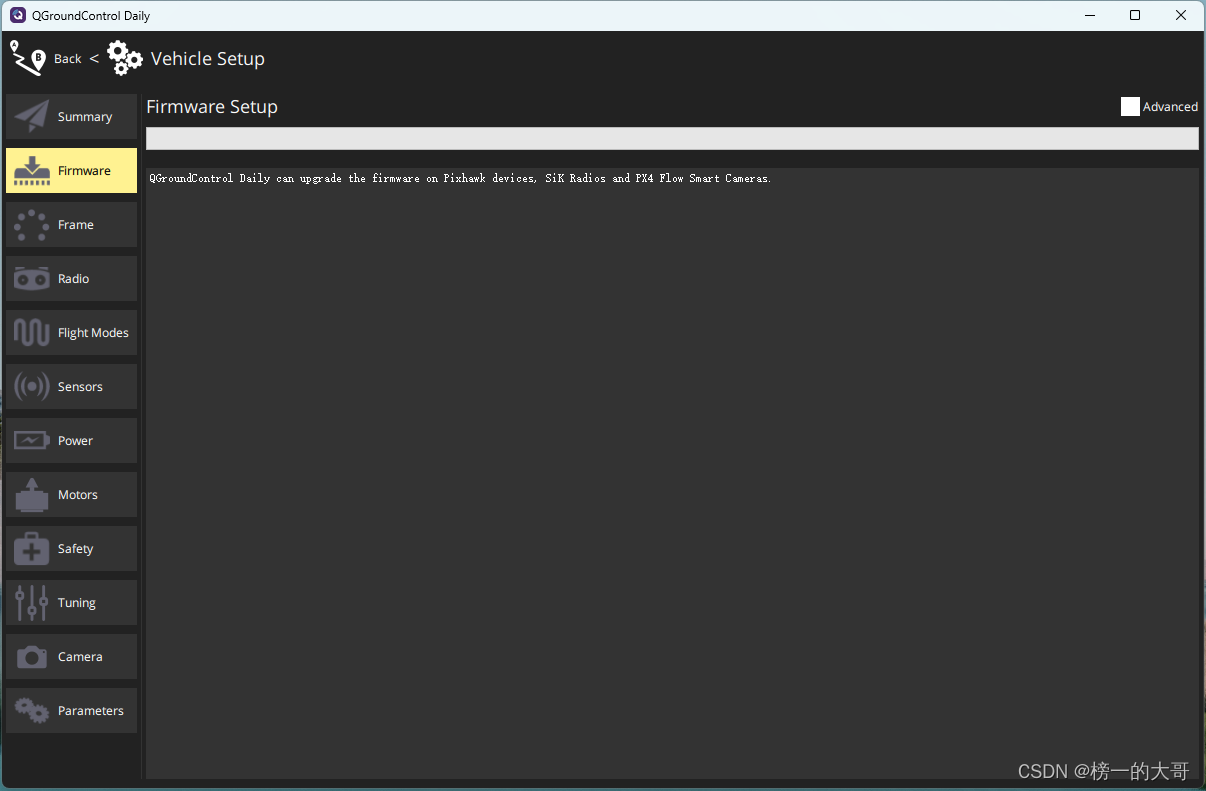
二.固件
1.代码位置:
src\VehicleSetup\FirmwareUpgrade.qml
2.功能介绍:
1.固件版本信息:显示当前飞行器或车辆上安装的固件版本信息,包括固件的类型(如飞控固件、地面站固件等)和版本号。
2.固件更新:提供了检查和更新固件的功能,用户可以通过连接到互联网或本地文件系统,检查是否有新的固件版本可用,并进行更新操作。
三.机架
1.代码位置:
src\AutoPilotPlugins\APM\APMAirframeComponent.qml
2.功能介绍:
机架类型选择:允许用户选择飞行器的机架类型,例如四旋翼(Quadrotor)、六旋翼(Hexacopter)、固定翼(Fixed Wing)等。选择正确的机架类型对于后续的飞行控制和传感器校准非常重要。

四.遥控器
1.代码位置:
src\AutoPilotPlugins\Common\RadioComponent.qml
2.功能讲解:
遥控器页面的作用是为用户提供了一个集中设置和配置遥控器与飞行器之间通信和控制参数的地方,帮助他们正确地连接和配置遥控器,确保飞行器能够准确地响应遥控器指令,实现稳定、可靠的遥控飞行
1.遥控器类型选择:允许用户选择所使用的遥控器类型,Mode 1 或 Mode2 (美国手或日本手)。不同类型的遥控器可能需要不同的设置和配置。
2.通道映射设置:用户可以在遥控器页面中设置遥控器通道与飞行器各种功能的映射关系。通过映射设置,用户可以定义每个遥控器通道对应的飞行器动作,如油门、方向舵、升降舵等。
3.校准遥控器:在遥控器页面中,用户通常可以进行遥控器的校准操作,以确保遥控器的各个通道输出值范围正确,避免飞行器因接收到不正确的遥控信号而出现异常行为。
4.遥控器状态监控:有些遥控器页面还提供了遥控器状态监控功能,可以实时显示遥控器各个通道的输入值,帮助用户检查遥控器与飞行器之间的通信是否正常。

五.飞行模式
1.代码位置:
src\AutoPilotPlugins\APM\APMFlightModesComponent.qml
2.功能介绍:
Flight Modes页面允许用户根据飞行任务和飞行员技能水平选择合适的都能有合适的飞行模式,从而提高飞行的安全性和效率。此外,它还飞行模式,确保飞行器在不同环境下安全、高效地执行任务。用户还可以在此页面设置模式切换条件、切换顺序等高级选项。
1.手动模式(Manual):在这个模式下,飞行器直接响应遥控器的输入,通常没有稳定辅助或自动飞行控制。
2.姿态模式(Acro):飞行器保持在QGroundControl(QGC)的Vehicle Setup(车辆设置)中的Flight Modes页面,其主要作用是设置和管理飞行器的飞行模式,这些模式通常包括但不限于:
3.定高模式基础模式(Stabilized):这是一种自动模式,飞行器会保持稳定,飞行员只需控制油门和方向。在这一模式下,飞控系统:飞行器保持一个固定的海拔高度,但可以在水平方向上由遥控器控制会执行PID(比例-积分-微分)控制,以保持飞行器的姿态稳定。
4.GPS导航模式(Position Hold):飞行器使用GPS信号进行位置。

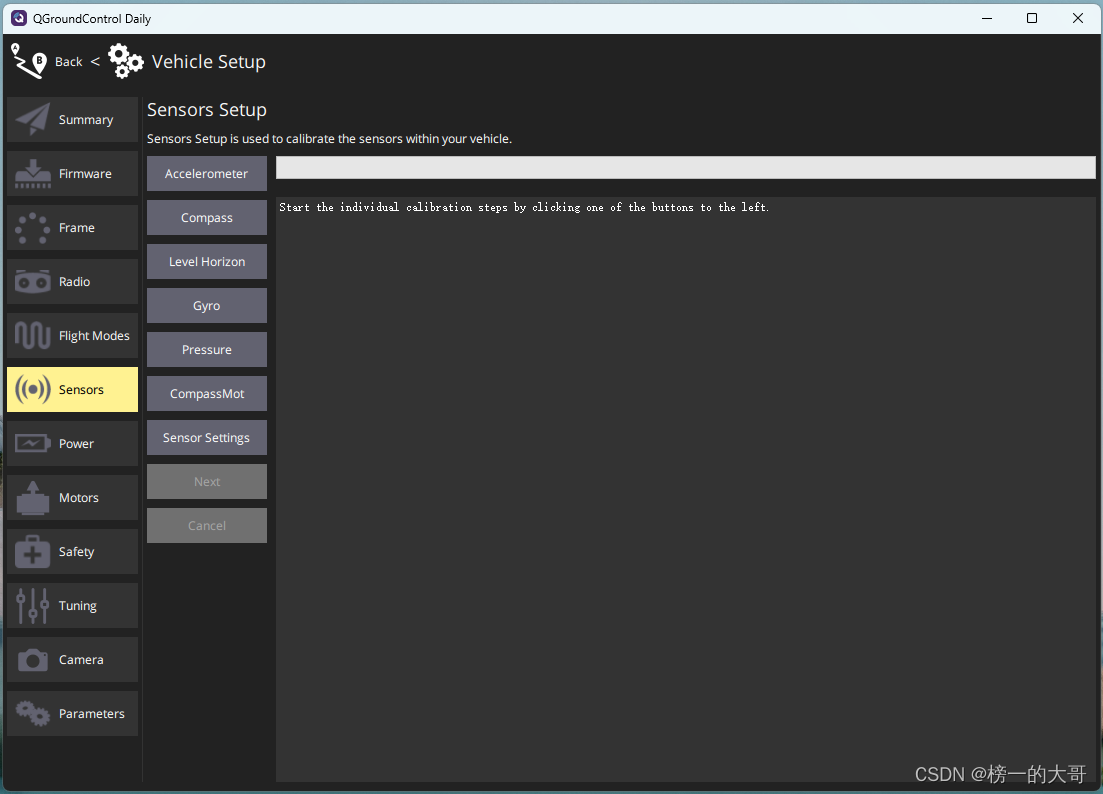
六.传感器
通过Sensors页面,用户可以全面了解飞行器上各个传感器的状态和性能,及时发现并解决传感器相关的问题,确保飞行器的安全飞行。
1.传感器状态监控:显示飞行器上各个传感器的状态信息,如陀螺仪、加速度计、磁力计、气压计等的数据。用户可以实时监测传感器的运行情况,以确保传感器正常工作。
2.传感器校准:提供传感器校准工具,用户可以通过这些工具对传感器进行校准,以消除传感器误差,确保传感器数据的准确性。
3.传感器故障诊断:如果传感器出现故障或异常,Sensors页面会提供相应的错误信息和诊断建议,帮助用户快速定位和解决问题。
4.传感器参数配置:用户可以在Sensors页面中配置传感器的参数,如更新率、灵敏度、校准参数等,以满足不同飞行需求。
5.传感器数据图表:显示传感器数据的实时图表,用户可以通过这些图表分析传感器数据的变化趋势,帮助优化飞行器的性能。
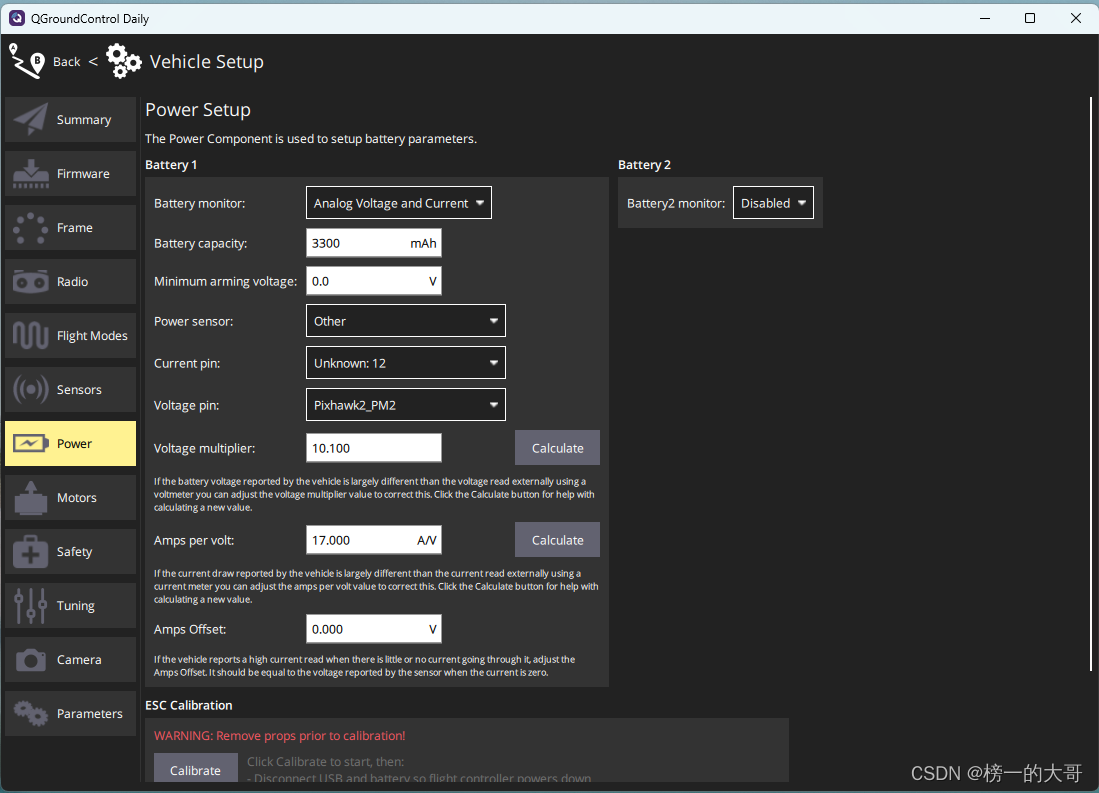
七.电池
1.代码位置:
src\AutoPilotPlugins\APM\APMPowerComponent.qml
2.功能讲解:
通过Power页面,用户可以确保电池在飞行中的安全性、提高电池使用的效率,并延长电池的使用寿命。这些功能对于无人机的安全飞行和任务执行至关重要。
1.电池监控:显示当前连接到飞行器的电池的电压、电流、电量(SOC)、温度等关键参数。这有助于实时监控电池状态,确保在飞行中电池工作在安全范围内。
2.电池配置:允许用户设置电池的类型(如LiPo、LiIon等)、容量、电压、放电率等参数。正确配置这些参数对于准确计算剩余飞行时间和电池健康状态至关重要。
3.低电量警告:用户可以设置低电量警告阈值,当电池电量降至设定值时,QGC会发出警告,提醒飞行员及时采取措施。
4.电池校准:提供电池校准功能,帮助用户校准电池的电量计,确保电池剩余电量的准确显示。
5.飞行时间估算:基于当前的电池配置和飞行器消耗的电流,QGC可以估算出在当前负载下的飞行时间,帮助飞行员规划飞行任务。
6.电池健康监控:监控电池的老化状态,提供电池循环次数和健康度等信息,帮助用户判断电池是否需要更换。
7.多电池支持:对于多电池系统,电池页面可以分别显示每个电池的状态,并提供独立的监控和管理。
8.电源输出配置:如果飞行器有多个电源输出,如相机、灯光等,可以在电池页面配置每个输出的参数和开关控制。
八.电机
1.代码位置:
src\AutoPilotPlugins\APM\APMMotorComponent.qml
2.功能介绍:
通过Motor页面,用户可以确保飞行器的电机正常工作、提高飞行器的稳定性和可靠性,并调整电机参数以适应不同的飞行需求。这些功能对于无人机的安全飞行和任务执行至关重要。
开启安全开关,通过滑动对应螺旋桨滑动条,控制螺旋桨的转动。

九.安全
1.代码位置:
src\AutoPilotPlugins\APM\APMSafetyComponent.qml
2.功能介绍:
通过Safety页面,用户可以提前设置各种安全参数和功能,以确保飞行器在飞行过程中能够安全、稳定地运行,并在出现问题时能够及时采取应对措施,保障飞行器和周围环境的安全。这些功能对于无人机的安全飞行和任务执行至关重要。
1.飞行器安全设置:在Safety页面上,用户可以配置各种飞行器的安全设置,如最大高度限制、最大速度限制、最大航向角限制等,以确保飞行器在飞行过程中不会超出安全范围。
2.低电压警告:用户可以设置低电压警告参数,当飞行器电池电压低于设定值时,QGC会提醒用户及时返航或更换电池,以避免意外发生。
3.失控保护:提供失控保护功能,用户可以配置失控保护参数,当飞行器失去信号或控制时,QGC可以自动执行相应的失控保护程序,以确保飞行器安全返回或着陆。
4.返航设置:用户可以在Safety页面配置返航功能的相关参数,如返航高度、返航速度等,以确保飞行器在出现问题时能够安全返回起飞点。
5.避障设置:某些飞行器可能配备避障传感器,用户可以在Safety页面配置避障功能的相关参数,以确保飞行器在遇到障碍物时能够及时避让或停止前进。

十.参数
1.代码位置:
src\QmlControls\ParameterEditor.qml
2.功能介绍:
通过Parameters页面,用户可以根据具体需求对飞行器的各种参数进行调整和配置,以实现更加个性化和优化的飞行器性能和功能。这些参数的设置对于飞行器的飞行表现和任务执行具有重要影响,因此需要谨慎调整和测试。
1.飞行器参数配置:Parameters页面列出了飞行器的各种参数,包括但不限于PID控制器参数、传感器校准参数、遥控器通道映射参数等。用户可以通过修改这些参数来调整飞行器的飞行性能和行为。
2.自动模式参数设置:在Parameters页面中,用户可以配置与自动飞行模式相关的参数,如航点间的距离、航线速度、自动返航高度等。这些参数的设置会影响飞行器在自动模式下的行为。
3.传感器校准:Parameters页面中还包含了一些传感器的校准参数,用户可以通过这些参数来进行传感器的校准,以确保传感器的准确性和稳定性。
4.飞行器性能调优:通过Parameters页面,用户可以对飞行器的性能进行调优,比如调整飞行器的姿态控制参数、高度控制参数、速度控制参数等,以提升飞行器的飞行性能和稳定性。
5.系统参数配置:Parameters页面中还包含了一些系统级别的参数,用户可以根据需要进行配置,比如飞行器的最大速度限制、最大高度限制、电池参数设置等。
















 945
945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









