







本发明提供一种基于柔性压力传感器的机械手驱动系统,包括:多个柔性压力传感器、固定指、驱动指、凹状掌垫、传动机构、舵机、调节机构和手爪支架。柔性压力传感器分别贴附在凹状掌垫和驱动指内表面,凹状掌垫采用弹性复合材料,表面贴附柔性压力传感器;通过调节机构可以改变固定指与凹状掌面的角度。本发明专利结合机械臂或者刚性杆,可以完成柔顺抓取物体任务:当物体与凹状柔性压力传感器之间的接触力达到预设值后,微型控制器接收抓取信号并发送控制指令使驱动手指执行抓握动作,根据驱动指表面柔性压力传感器阵列实时反馈的接触压力信息,微型控制器控制舵机施加合理的抓取力度。本装置具有抓取稳定、防止物体破损和抓取时机准确的特性。
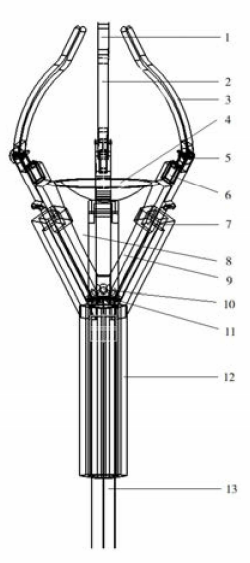
1.一种基于柔性压力传感器的机械手驱动系统,包括:末端柔性压力传感器(1)、中端柔性压力传感器(2)、驱动指(3)、凹状柔性压力传感器(4)、传动机构(5)、舵机(6)、调节卡(7)、凹状掌垫(8)、固定指(9)、弹簧(10)、转轴(11)、套管(12)、手爪支架(13)和微型控制器,其特征在于:所述末端柔性压力传感器(1)固定于驱动指(3)上部内侧表面,所述中端柔性压力传感器(2)固定于驱动指(3)中部内侧表面,所述驱动指(3)、固定指(9)和传动机构(5)同转轴连接,所述驱动指(3)由传动机构(5)控制转动角度,所述凹状柔性压力传感器(4)固定于凹状掌垫(8)凹面表面,所述舵机(6)与传动机构(5)连接并为传动机构(5)提供动力........















 4181
4181











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









