









📢本篇文章是博主强化学习(RL)领域学习时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在👉强化学习专栏:
【强化学习】- 【单智能体强化学习】(2)---《基础算法:Q-Learning算法》
基础算法:Q-Learning算法
目录
一、概述
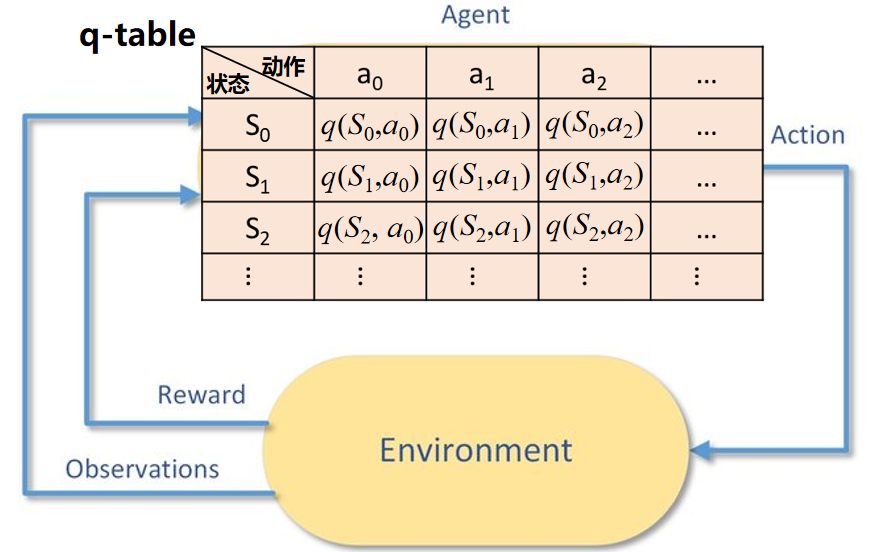
在强化学习中,Q-Learning 是一种基于值函数的强化学习算法。它通过学习一个状态-动作值函数(Q函数)来选择最优策略。Q-Learning 是一种 无模型(model-free) 的强化学习方法,意味着它不需要了解环境的动态(即转移概率和奖励函数),而只依赖于与环境的交互。
Q-Learning 的目标是通过不断地更新 Q 值,使得智能体能够选择在给定状态下能获得最大累积奖励的动作。Q-Learning 的一个重要特点是,它保证在探索足够多的状态-动作对后,最终会收敛到最优策略。
二、Q函数的定义
Q-Learning 中,Q函数 表示在状态
下采取动作
所能获得的期望回报。Q函数是 Q-Learning 的核心,通过对 Q 值的不断更新,最终得到最优的 Q 函数
。
三、Q-Learning算法的核心思想
Q-Learning 的核心思想是通过贝尔曼方程来更新 Q 值。贝尔曼方程描述了某一状态-动作对的 Q 值与其后续状态-动作对之间的关系。
在 Q-Learning 中,更新公式为:
其中:
和
分别是当前状态和当前动作。
是智能体在执行动作
是折扣因子,表示未来奖励的衰减程度
。
是状态
下所有可能动作的最大 Q 值,代表智能体在下一状态下选择最优动作后的预期回报。
是学习率,控制每次 Q 值更新的步长。
通过这个公式,Q-Learning 在每个时间步 都会根据当前的经验(状态、动作、奖励、下一状态)来更新 Q 值。随着学习的进行,Q 值逐渐收敛到最优 Q 值
,从而得到最优策略。
四、Q-Learning算法的工作流程
-
初始化 Q 表:首先,我们初始化 Q 值表格,通常将所有状态-动作对的 Q 值初始化为零或小的随机值。
-
选择动作:在每个时间步,智能体基于当前的 Q 值选择一个动作。常见的选择策略有:
- 贪婪策略(Greedy Policy):选择当前 Q 值最大的动作,即选择
。
- ε-贪婪策略(ε-greedy Policy):以
的概率选择 Q 值最大的动作,以
的概率随机选择其他动作(探索新的状态),避免陷入局部最优。
- 贪婪策略(Greedy Policy):选择当前 Q 值最大的动作,即选择
-
执行动作并更新 Q 值:智能体根据选择的动作与环境交互,获得奖励
-
重复步骤2和步骤3:直到达到某个终止条件(例如,达到最大步数或者 Q 值收敛)。
五、Q-Learning 算法的推导
Q-Learning 的更新公式来自于 贝尔曼最优方程(Bellman Optimality Equation),它为求解最优值函数提供了递归关系。假设 是最优状态-动作值函数,即在每个状态下,选择最优动作可以获得最大回报。根据贝尔曼最优方程,我们有:
这表示,某一状态-动作对的 Q 值等于当前奖励 加上未来状态
下,采取最优动作
所得到的最大预期回报。
通过与实际更新公式的对比,Q-Learning 通过贝尔曼方程递归地更新 Q 值,使得 Q 值逐渐逼近最优值。
六、Q-Learning 的收敛性
Q-Learning 算法具有 收敛性,即在所有状态-动作对的 Q 值都经过足够多的更新后,Q-Learning 会收敛到最优的 Q 值 。这一收敛性基于以下条件:
- 充分探索:每个状态-动作对都被充分探索。
- 学习率衰减:学习率
[Python] Q-learning实现
下面代码实现了一个经典的 Q-learning 强化学习算法,用于训练一个智能体在一个简单的环境中寻找从左到右的目标(状态从0到19,目标在19)。智能体的任务是通过向左或向右移动来最大化累积奖励。
项目代码我已经放入GitCode里面,可以通过下面链接跳转:🔥
后续相关单智能体强化学习算法也会不断在【强化学习】项目里更新,如果该项目对你有所帮助,请帮我点一个星星✨✨✨✨✨,鼓励分享,十分感谢!!!
若是下面代码复现困难或者有问题,也欢迎评论区留言。
"""《Q-learning算法实现》
时间:2024.12
作者:不去幼儿园
"""
import numpy as np # 导入NumPy库,用于数值计算
import pandas as pd # 导入Pandas库,用于数据结构操作
import matplotlib.pyplot as plt # 导入Matplotlib库,用于绘制图形
import time # 导入time库,用于控制程序暂停时间
参数设置
ALPHA = 0.1 # 学习率,决定每次Q值更新的幅度
GAMMA = 0.95 # 折扣因子,决定未来奖励的权重
EPSILION = 0.9 # epsilon-greedy策略中的探索概率,控制随机选择动作的比例
N_STATE = 20 # 状态空间的大小,表示状态的数量
ACTIONS = ['left', 'right'] # 可用的动作集合,左移和右移
MAX_EPISODES = 200 # 最大训练回合数
FRESH_TIME = 0.1 # 每步之间的时间间隔,用于渲染环境构建Q表
# 构建Q表,Q表存储每个状态-动作对的Q值
def build_q_table(n_state, actions):
q_table = pd.DataFrame(
np.zeros((n_state, len(actions))), # 创建一个形状为(n_state, len(actions))的全零矩阵
np.arange(n_state), # 状态的行索引为0到n_state-1
actions # 动作的列索引为'left'和'right'
)
return q_table # 返回Q表选择动作
# 选择当前状态下的动作
def choose_action(state, q_table):
# epsilon-greedy 策略
state_action = q_table.loc[state, :] # 获取当前状态下所有动作的Q值
if np.random.uniform() > EPSILION or (state_action == 0).all(): # 探索(随机选择)或当Q值全为0时
action_name = np.random.choice(ACTIONS) # 随机选择一个动作
else: # 利用(选择Q值最大的动作)
action_name = state_action.idxmax() # 选择Q值最大对应的动作
return action_name # 返回选择的动作环境反馈
# 获取环境反馈,依据当前状态和所选动作返回下一个状态和奖励
def get_env_feedback(state, action):
if action == 'right': # 如果选择了向右的动作
if state == N_STATE - 2: # 如果已经到达倒数第二个状态
next_state = 'terminal' # 终止状态
reward = 1 # 到达终止状态时给予奖励1
else:
next_state = state + 1 # 否则,状态右移
reward = -0.5 # 每步奖励为-0.5
else: # 如果选择了向左的动作
if state == 0: # 如果已经到达最左端
next_state = 0 # 保持在状态0
else:
next_state = state - 1 # 否则,状态左移
reward = -0.5 # 每步奖励为-0.5
return next_state, reward # 返回下一个状态和奖励更新环境状态
# 更新环境的状态并打印出来
def update_env(state, episode, step_counter):
env = ['-'] * (N_STATE - 1) + ['T'] # 创建一个状态列表,其中T表示目标终止状态
if state == 'terminal': # 如果状态是终止状态
print("Episode {}, the total step is {}".format(episode + 1, step_counter)) # 输出当前回合和步数
final_env = ['-'] * (N_STATE - 1) + ['T'] # 终止状态时的环境状态
return True, step_counter # 返回终止状态和步数
else:
env[state] = '*' # 将当前状态位置标记为*表示智能体所在的位置
env = ''.join(env) # 将状态列表转为字符串显示
print(env) # 打印当前环境状态
time.sleep(FRESH_TIME) # 暂停FRESH_TIME秒以控制显示速度
return False, step_counter # 返回非终止状态和步数Q-learning算法实现
# Q-learning算法实现
def q_learning():
q_table = build_q_table(N_STATE, ACTIONS) # 构建Q表
step_counter_times = [] # 用于存储每个回合的步数
for episode in range(MAX_EPISODES): # 遍历每个回合
state = 0 # 每个回合从状态0开始
is_terminal = False # 是否到达终止状态的标志
step_counter = 0 # 步数计数器
update_env(state, episode, step_counter) # 更新环境并显示
while not is_terminal: # 如果没有到达终止状态
action = choose_action(state, q_table) # 选择动作
next_state, reward = get_env_feedback(state, action) # 获取环境反馈
next_q = q_table.loc[state, action] # 获取当前状态-动作对的Q值
if next_state == 'terminal': # 如果到达终止状态
is_terminal = True # 标记为终止状态
q_target = reward # 目标Q值为奖励值
else: # 如果没有到达终止状态
delta = reward + GAMMA * q_table.iloc[next_state, :].max() - q_table.loc[state, action] # 计算TD误差
q_table.loc[state, action] += ALPHA * delta # 更新Q值
state = next_state # 更新状态
is_terminal, steps = update_env(state, episode, step_counter + 1) # 更新环境并显示
step_counter += 1 # 步数+1
if is_terminal: # 如果到达终止状态
step_counter_times.append(steps) # 记录回合的步数
return q_table, step_counter_times # 返回更新后的Q表和每个回合的步数列表程序入口
# 程序入口
if __name__ == '__main__':
q_table, step_counter_times = q_learning() # 运行Q-learning算法
print("Q table\n{}\n".format(q_table)) # 打印最终的Q表
print('end') # 打印训练结束信息
# 绘制每回合步数的图表
plt.plot(step_counter_times, 'g-') # 以绿色线条绘制步数
plt.ylabel("steps") # 设置Y轴标签为"steps"
plt.show() # 显示图表
print("The step_counter_times is {}".format(step_counter_times)) # 打印每个回合的步数[Results] 运行结果
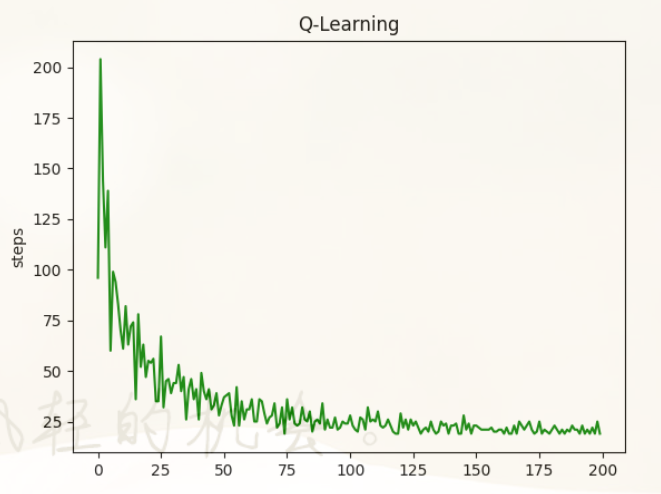
[Content] 算法内容
- 状态空间:智能体有20个状态(从0到19),目标状态是状态19。
- 动作空间:智能体可以选择两个动作:"left"(向左)和 "right"(向右)。
- 奖励机制:每一步都会受到-0.5的惩罚,只有在到达目标状态时(状态N_STATE-2),智能体会获得+1的奖励。
- Q-learning:智能体通过 epsilon-greedy 策略来选择动作,以平衡探索和利用。Q值根据 TD-error 更新,学习率为
ALPHA,折扣因子为GAMMA。
[Notice] 注意事项:
- 状态和动作空间的大小:此实现仅适用于较小的状态和动作空间,状态空间非常大时需要考虑更高效的策略。
- Q值更新:Q-learning 算法通过不断更新 Q 表来改进策略,但每个状态-动作对的 Q 值更新会比较缓慢,可能需要更多回合来收敛。
- 终止条件:训练通过状态
'terminal'来标识终止状态,若达到目标状态,即进入终止状态,智能体会停止该回合的学习。 - 学习率与折扣因子:学习率和折扣因子需要根据实际问题进行调优,以保证学习过程稳定且高效。
# 环境配置
Python 3.11.5
torch 2.1.0
torchvision 0.16.0
gym 0.26.2七、优缺点
优点:
- 简单易实现:Q-Learning 算法简单,易于实现,并且不需要对环境的模型做任何假设。
- 无模型方法:Q-Learning 是一个无模型的方法,意味着它不需要环境的转移概率和奖励函数。
- 保证收敛性:在充分探索且适当设置学习率的情况下,Q-Learning 保证最终能够收敛到最优策略。
缺点:
- 大规模状态空间问题:对于大型状态空间或连续状态空间,Q-Learning 需要保存一个巨大的 Q 值表,这在实际应用中不可行。为了解决这个问题,通常会使用 深度Q网络(DQN) 来进行近似。
- 探索和利用的平衡问题:Q-Learning 需要在探索新的动作和利用已学得的知识之间做平衡,特别是当状态空间较大时,探索的效率和效果是一个挑战。
八、总结
Q-Learning 是一种基于值的强化学习方法,通过不断更新 Q 值来逼近最优策略。它的核心是通过贝尔曼最优方程更新 Q 值,并通过贪婪策略或 ε-贪婪策略来选择动作。Q-Learning 的收敛性和无模型特点使其成为强化学习中经典且简单的算法之一,尽管在大规模或连续空间中存在一定的挑战。
更多强化学习文章,请前往:【强化学习(RL)】专栏
博客都是给自己看的笔记,如有误导深表抱歉。文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者,或者添加VX:Rainbook_2,联系作者。✨


















 733
733

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











