







目录
安装rqt-robot-steering控制面板(已安装则跳过)
sudo apt install ros-noetic-rqt-robot-steering
新建一个终端,先启动ros系统
roscore

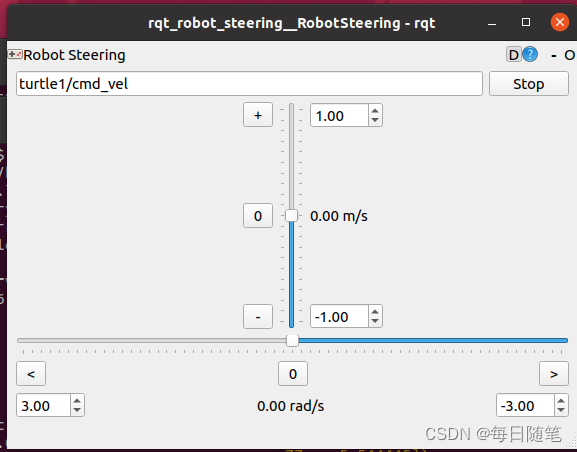
再新建一个终端,运行rqt-robot-steering
rosrun rqt_robot_steering rqt_robot_steering
第一个是包的名称,第二个是节点的名称
此时控制面板弹出

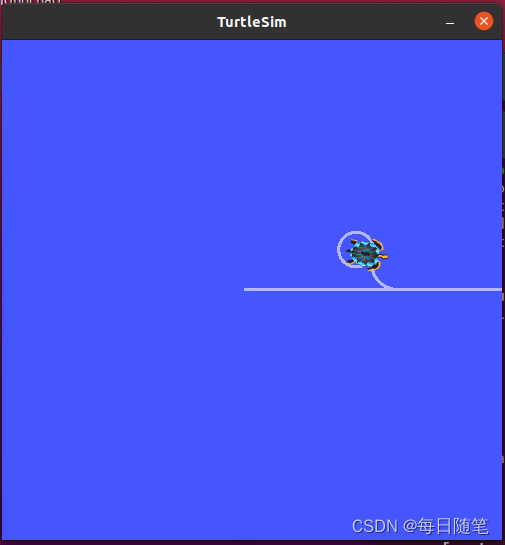
再打开一个终端,验证使用控制面板控制小乌龟移动
sudo apt install ros-noetic-turtlesim

rosrun turtlesim turtlesim_node

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









