






Ubuntu18.04 Faster_lio 环境搭建与运行全过程记录
参考连接:
Faster_lio
https://zhuanlan.zhihu.com/p/487082253
运行前准备:(默认已安装好ROS)
相关依赖
sudo apt-get install libgoogle-glog-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libpcl-dev
sudo apt-get install libyaml-cpp-dev
Ubuntu18.04默认的gcc g++编辑器版本为7.4,可通过
g++ --version
gcc --version
进行查看,因为Faster_lio对编辑版本的需求,我们需要将编辑器更新到9.0版本以上。
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get update
sudo apt install gcc-9
sudo apt install g++-9
cd /usr/bin
sudo rm gcc g++
sudo ln -s gcc-9 gcc
sudo ln -s g++-9 g++
安装tbb库
wget https://github.com/intel/tbb/archive/2019_U8.tar.gz
tar zxvf 2019_U8.tar.gz
rm 2019_U8.tar.gz
cd oneTBB-2019_U8
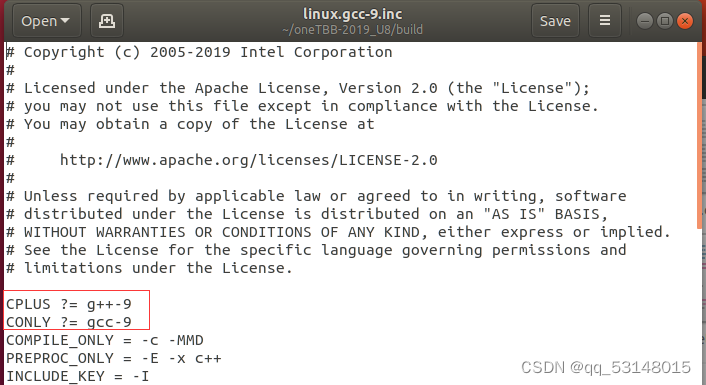
cp build/linux.gcc.inc build/linux.gcc-9.inc
code -n build/linux.gcc-9.inc
#对文本内容进行修改
CPLUS ?= g++-9
CONLY ?= gcc-9
#编译
make compiler=gcc-9 stdver=c++17 tbb_build_prefix=my_tbb_build
将tbb安装到系统中
sudo mkdir /usr/local/tbb-2019_U8
sudo cp -r include /usr/local/tbb-2019_U8/include
sudo ln -s /usr/local/tbb-2019_U8/include/tbb /usr/local/include/tbb
sudo cp -r build/my_tbb_build_release /usr/local/tbb-2019_U8/lib
sudo ln -s /usr/local/tbb-2019_U8/lib/libtbb.so.2 /usr/local/lib/libtbb.so
sudo ln -s /usr/local/tbb-2019_U8/lib/libtbbmalloc.so.2 /usr/local/lib/libtbbmalloc.so
sudo ln -s /usr/local/tbb-2019_U8/lib/libtbbmalloc_proxy.so.2 /usr/local/lib/libtbbmalloc_proxy.so
echo'export LD_LIBRARY_PATH=/usr/local/tbb-2019_U8/lib:$LD_LIBRARY_PATH' >> ~/.bashrc
source ~/.bashrc
一定要确保
export LD_LIBRARY_PATH=/usr/local/tbb-2019_U8/lib:$LD_LIBRARY_PATH
出现在你的.bashrc文件中
如果发现和历史版本冲突 可参考ubuntu tbb安装
开始操作faster_lio了┗|`O′|┛ 嗷~~
下面是我的操作步骤
mkdir faster_ws
cd faster_ws
mkdir src
cd src
git clone https://github.com/gaoxiang12/faster-lio.git
cd faster_lio
mkdir build
cd thirdparty
tar -xvf tbb2018_20170726oss_lin.tgz
cd ../build
cmake .. -DCUSTOM_TBB_DIR=`pwd`/../thirdparty/tbb2018_20170726oss
make -j4
cd ..
catkin_make
#!!!!!!!!!运行请进行
source devel/setup.bash
#!!!!!!!!
roslaunch faster_lio mapping_avia.launch
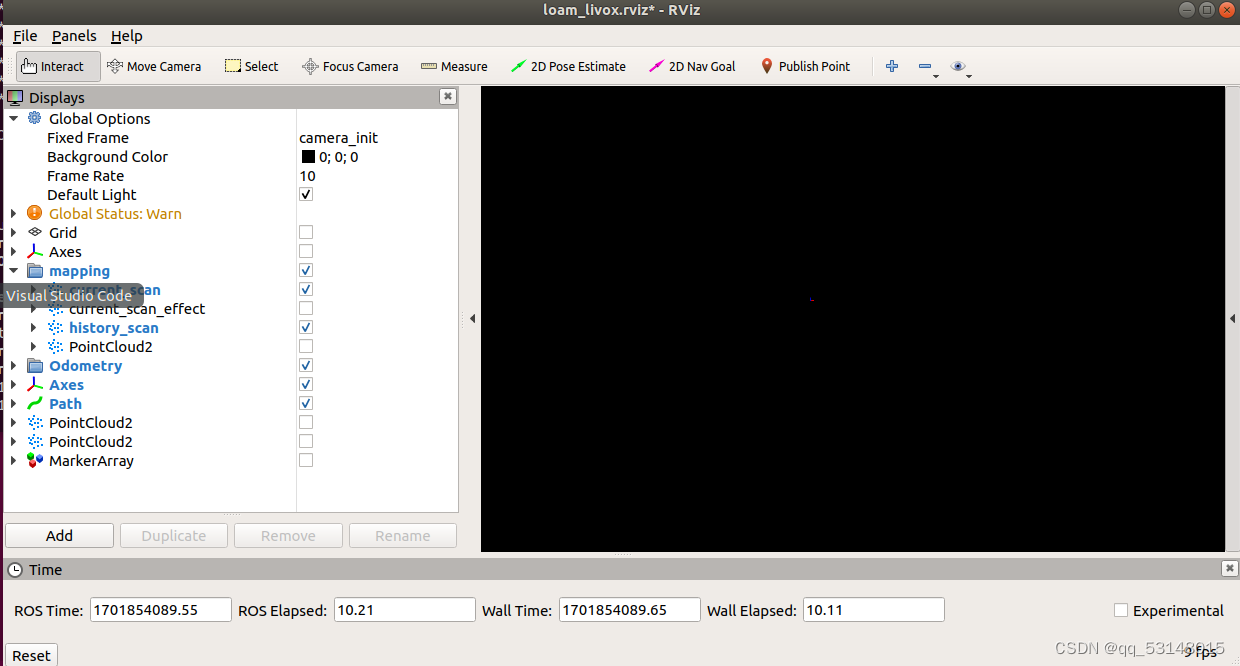
没有东西是因为没有IMU与雷达的话题传入
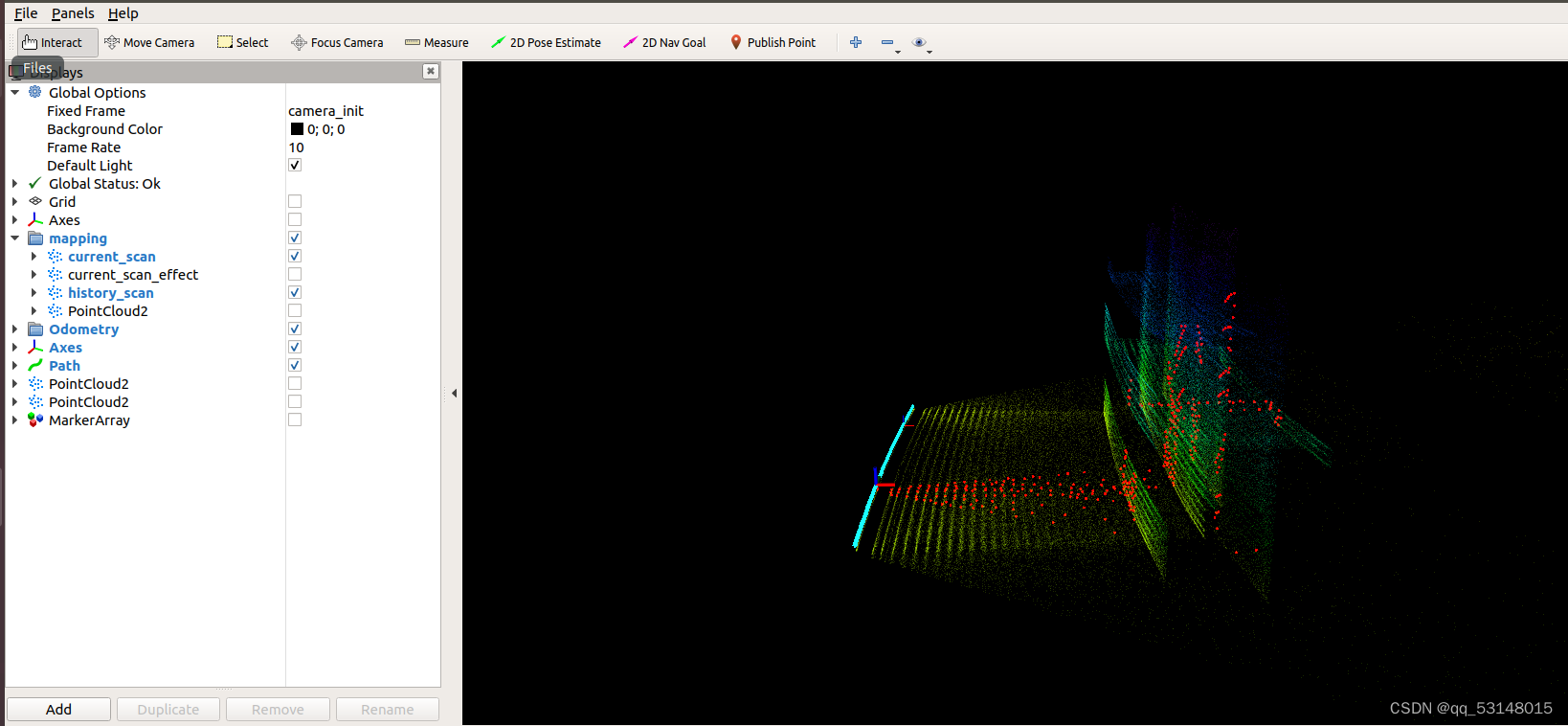
可以使用香港大学的包:
链接: https://pan.baidu.com/s/161QcTk4NWxPhClutooIZoA?pwd=cpr7 提取码: cpr7 。
rosbag play hku_campus_seq_00.bag

















 4577
4577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









