







设备:livox-horizon激光雷达
Fast-lio2 算法下载:
1.依赖【1.1 1.2 ros-melodic自带到版本已经满足】
1.1 Ubuntu and ROS
Ubuntu >= 16.04
ROS >= Melodic. ROS Installation
1.2. PCL && Eigen
PCL >= 1.8, Follow PCL Installation.
Eigen >= 3.3.4, Follow Eigen Installation.
1.3. livox_ros_driver 【可选-使用livox时】
Follow livox_ros_driver Installation.
mkdir -p fast-lio/src
cd fast-lio/src
git clone https://github.com/hku-mars/FAST_LIO.git //下载算法
cd FAST_LIO
git submodule update --init
cd ../..
catkin_make
source devel/setup.bash编译失败时可能会遇到类似的这个问题:
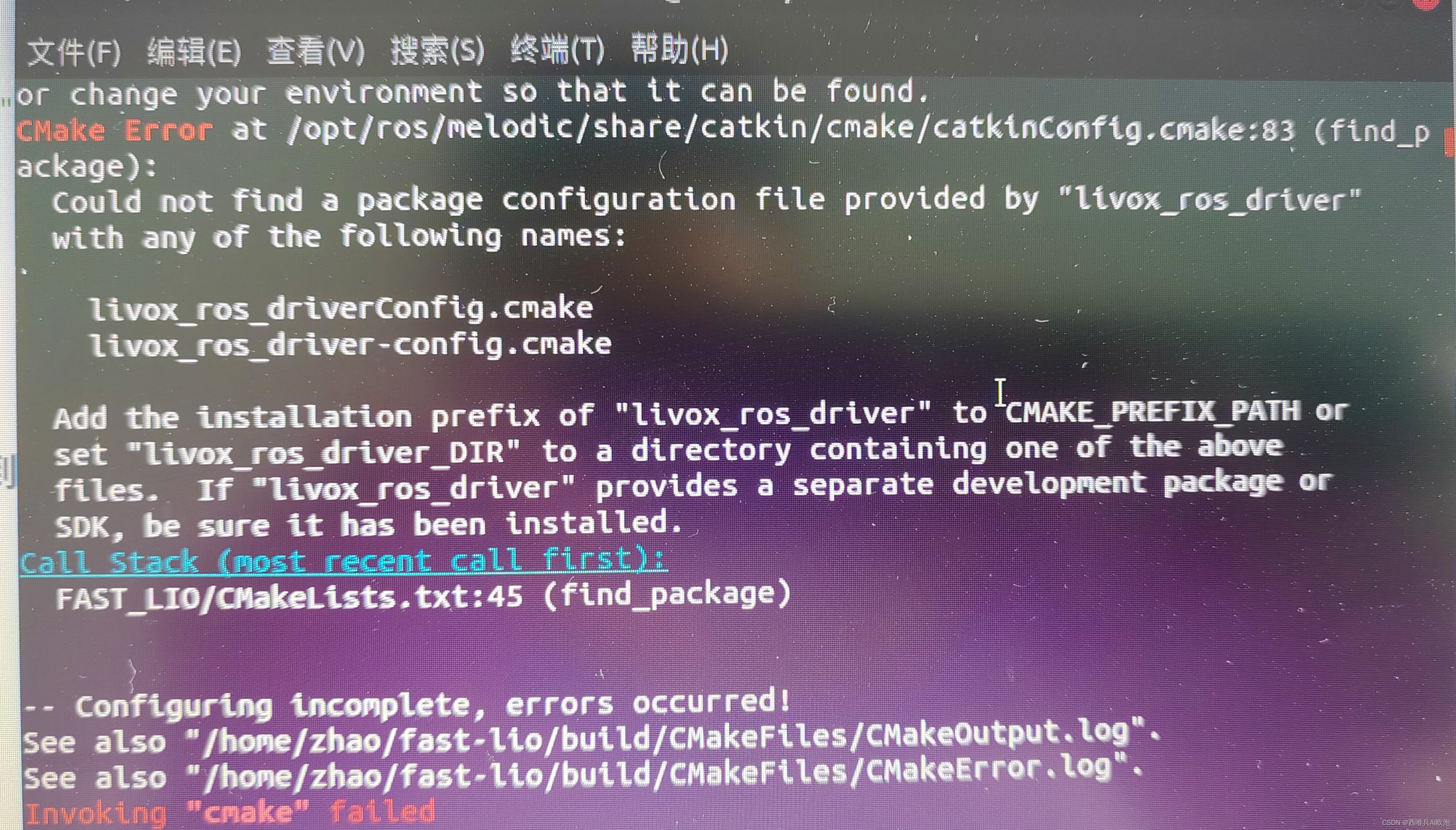
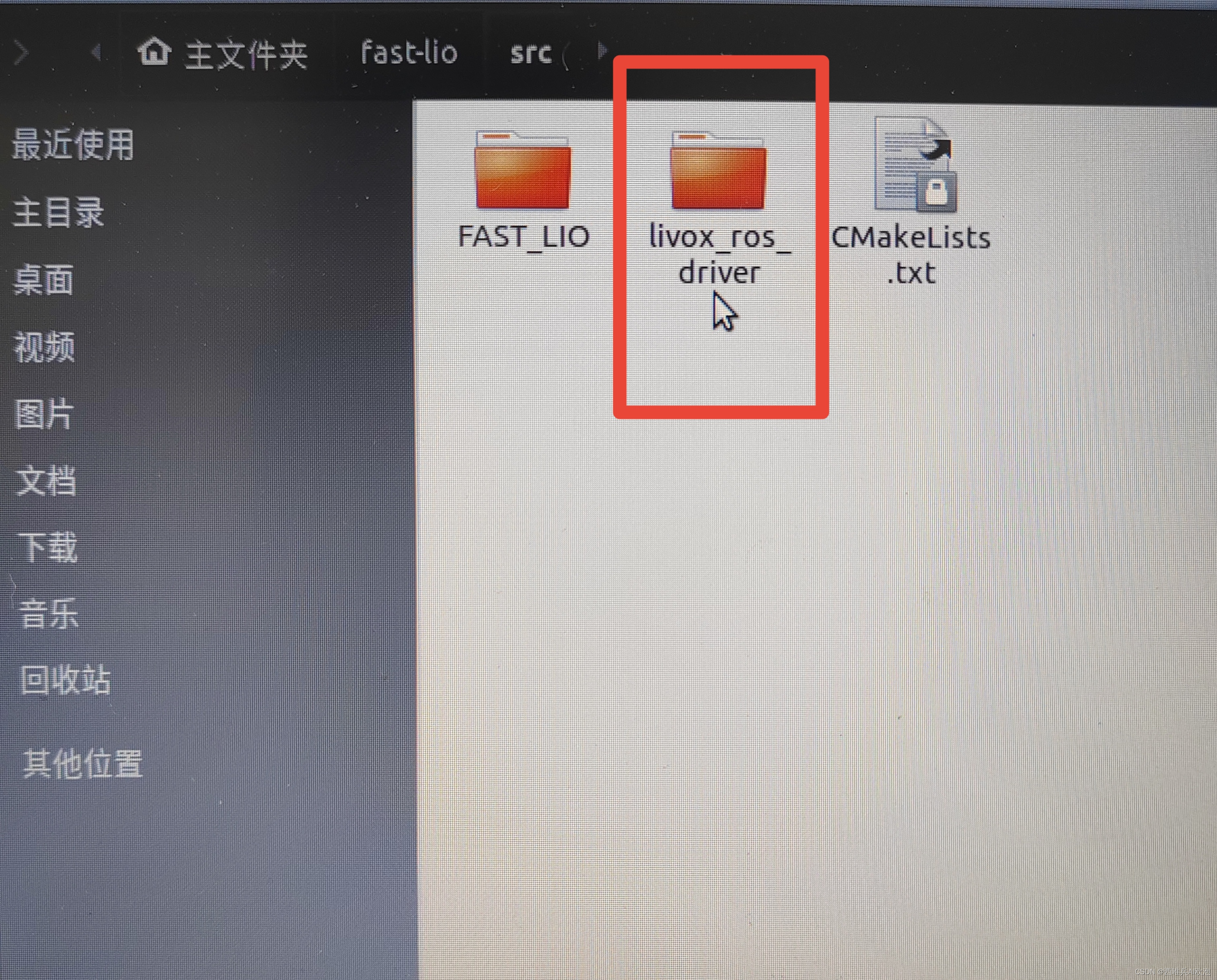
此时需要考虑fast-lio/src文件中是否有livox_ros_driver这个文件:
运行
1.连接设备
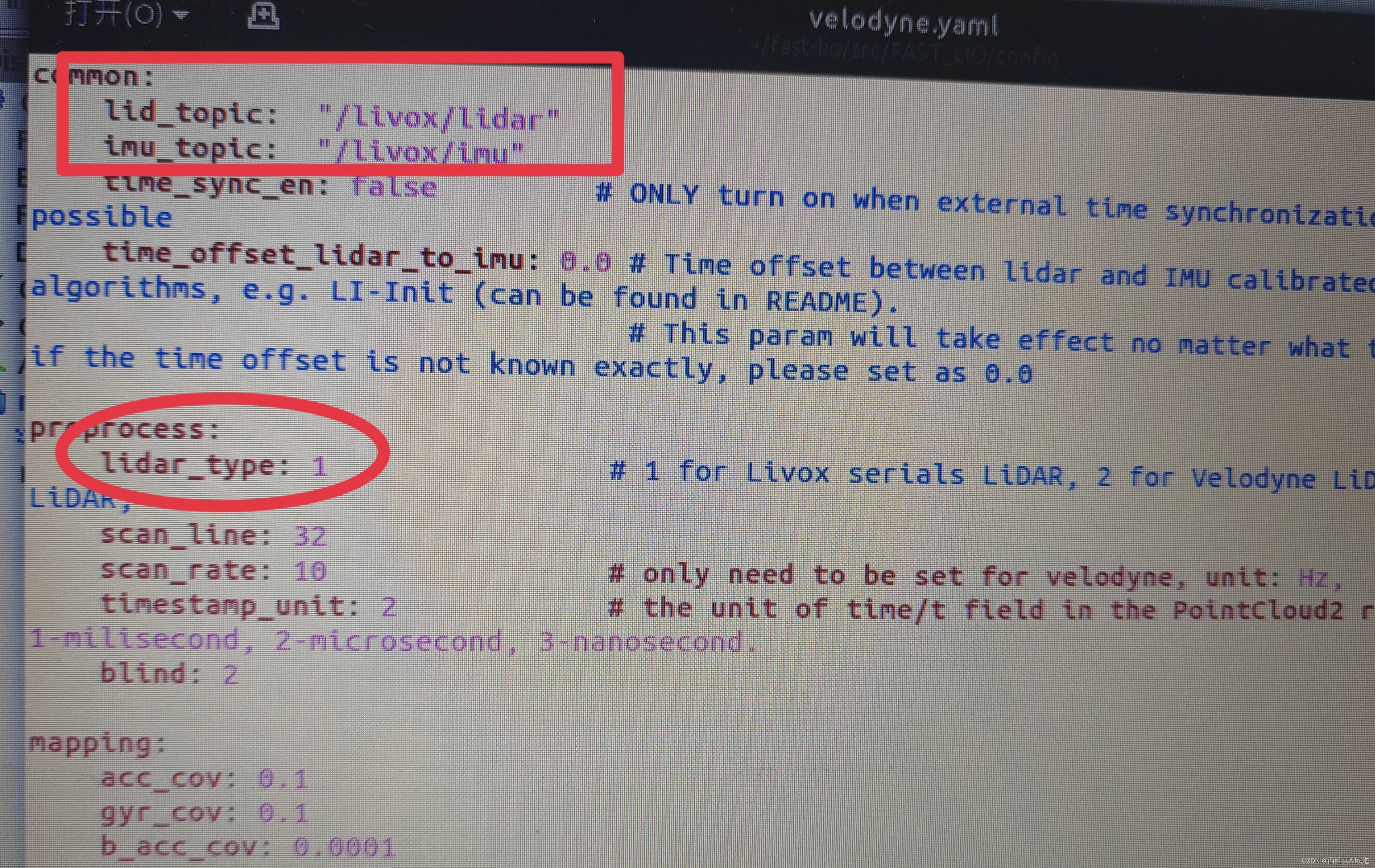
2.修改yaml文件
将fast-lio/src/FAST-LIO/config下的velodyne.yaml 话题名称修改为下图内容,将lidar_type改为1 【修改后,编译保存】
运行算法
1.运行雷达
cd ~/ws_livox
source devel/setup.bash
roslaunch livox_ros_driver livox_lidar_msg.launch2.运行fast-lio2算法
cd fast-lio/
source ./devel/setup.bash
roslaunch fast_lio mapping_velodyne.launch3.保存
新建一个文件夹,打开终端,输入以下代码保存建图
rosrun pcl_ros pointcloud_to_pcd input:=/cloud_registered
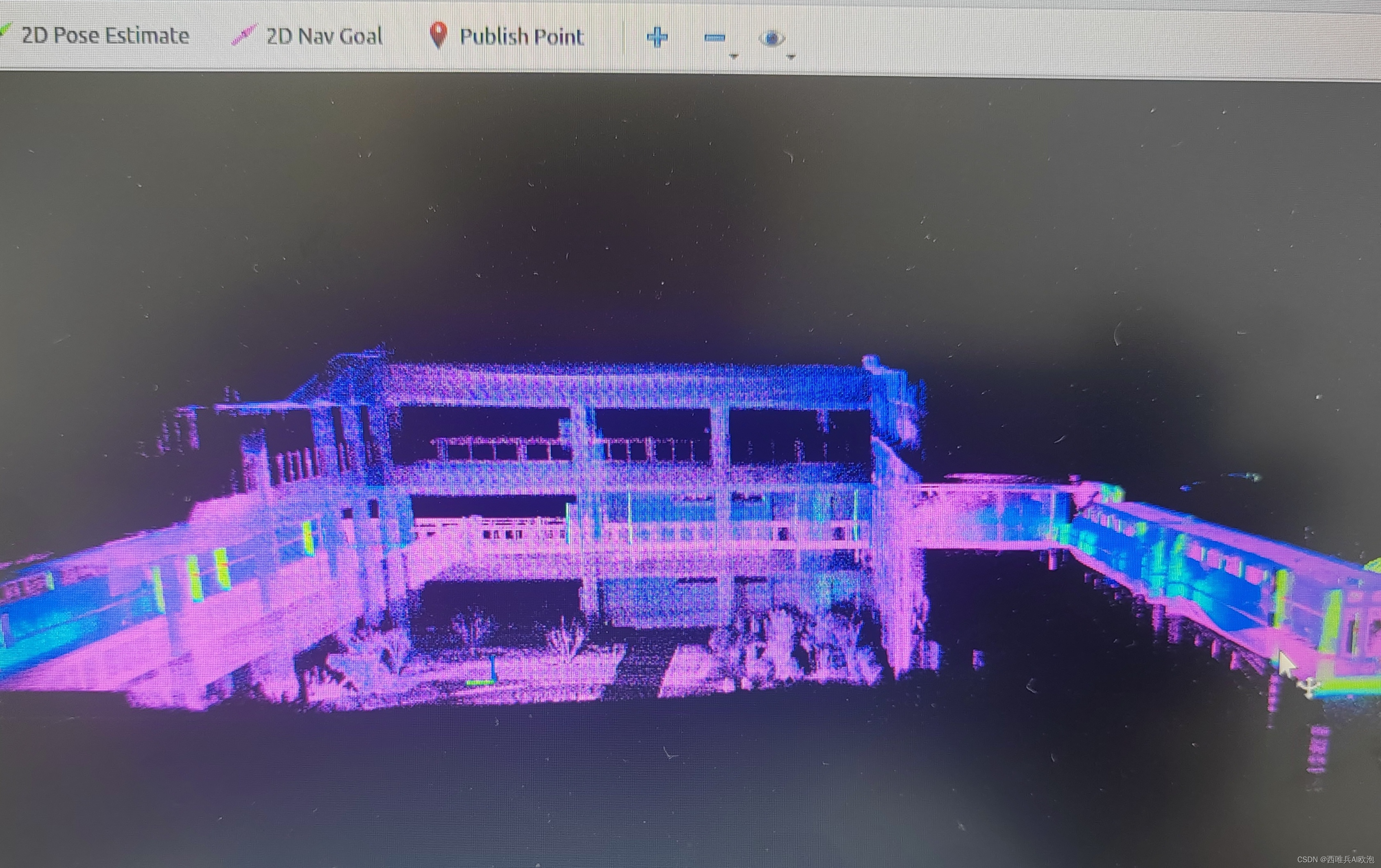
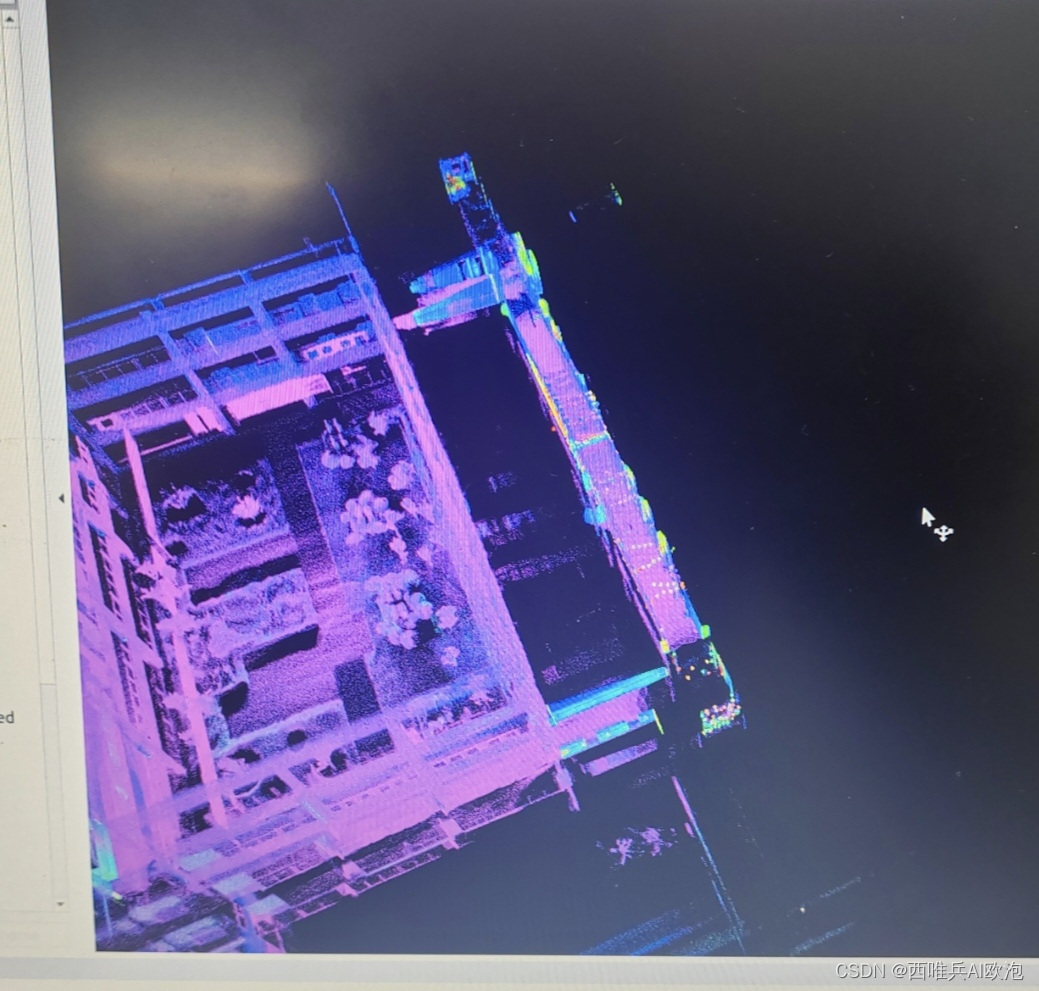
建图
1.运行时的建图
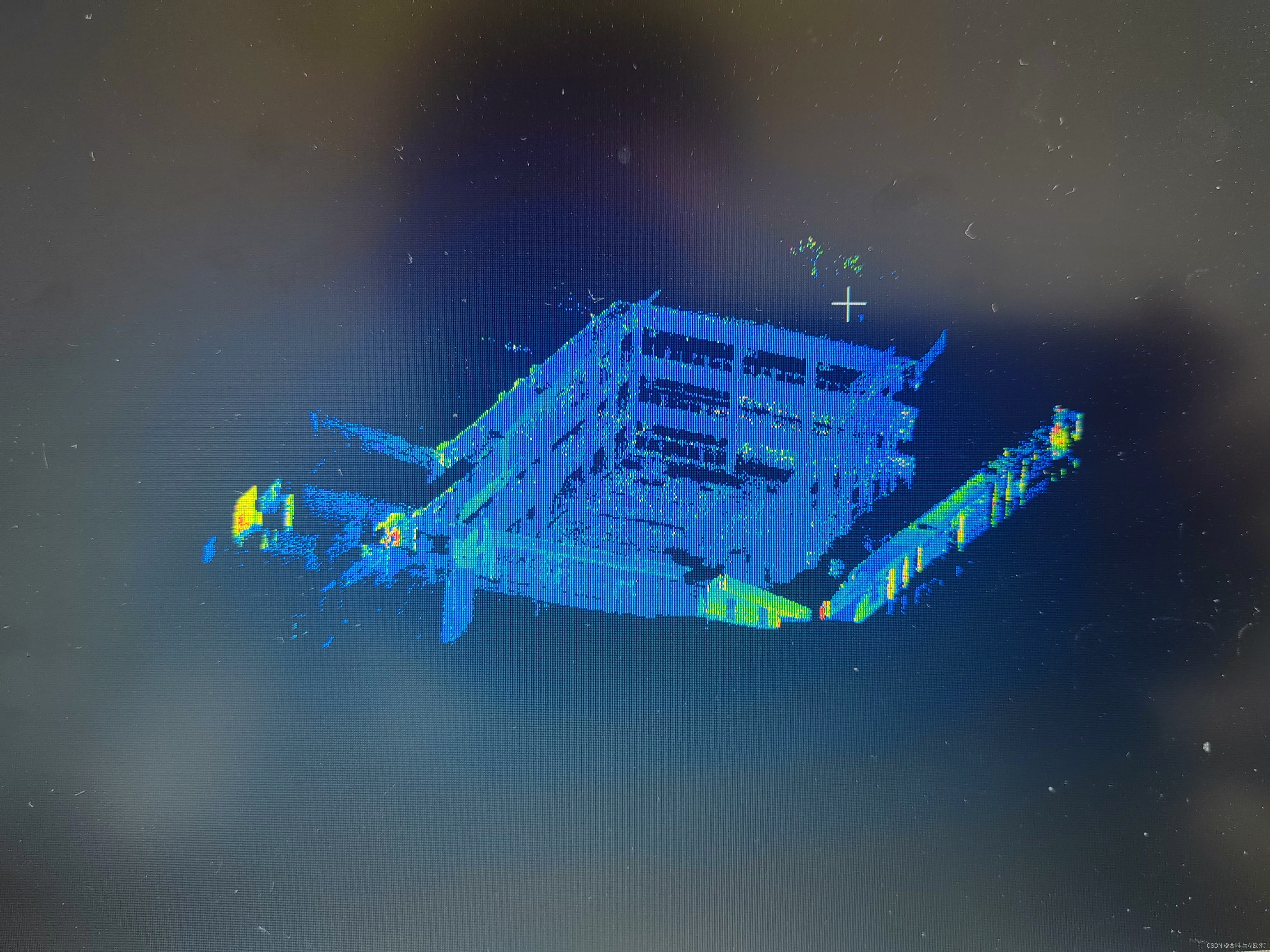
2.在cloudcompare上的建图
















 1250
1250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











