







最近开始学习mujoco仿真方面的内容
先前写过一篇博客:强化学习:MuJoCo机器人强化学习仿真入门(1)_mujoco仿真-CSDN博客
简单介绍了mujoco仿真的一些内容,下面想在Mujoco中将urdf转为xml文件,了解到mujoco是一个非常优秀的仿真软件,因此来记录学习过程
1. 安装mujoco
2. 在mujoco的可执行文件夹内执行命令进行转换
进入到.mujoco文件夹的bin目录当中:
cd /home/song/.mujoco/mujoco210/bin
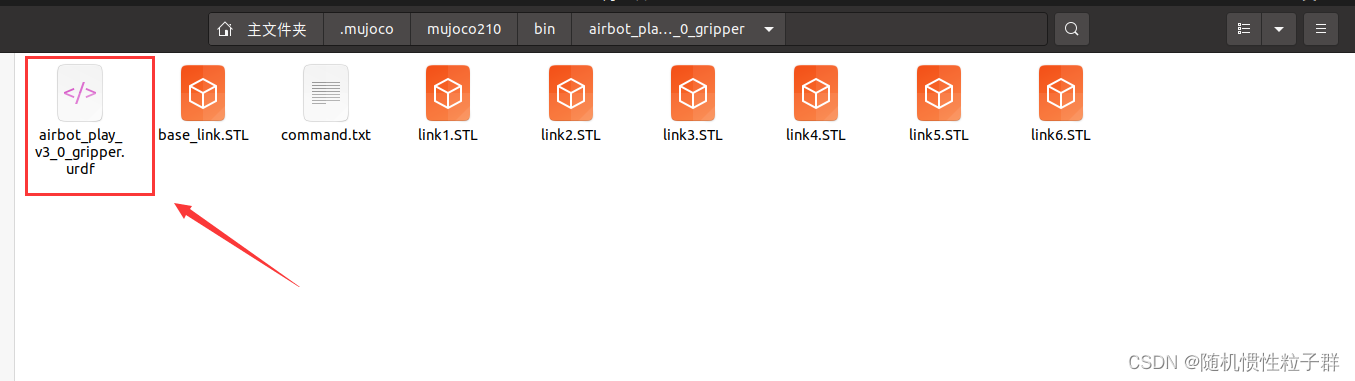
将需要进行转换的文件都放入一个文件夹中: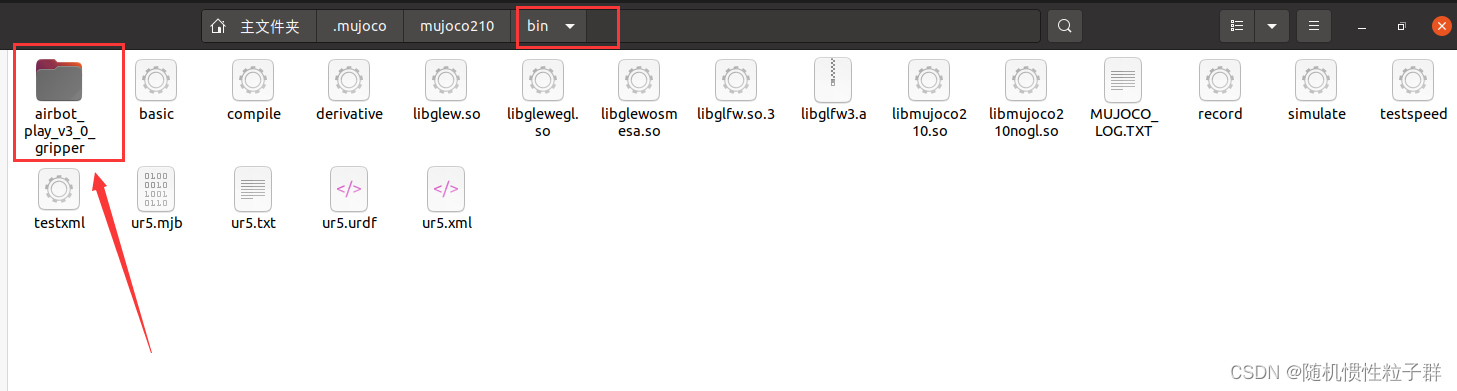
再将bin目录中的compile文件复制进来: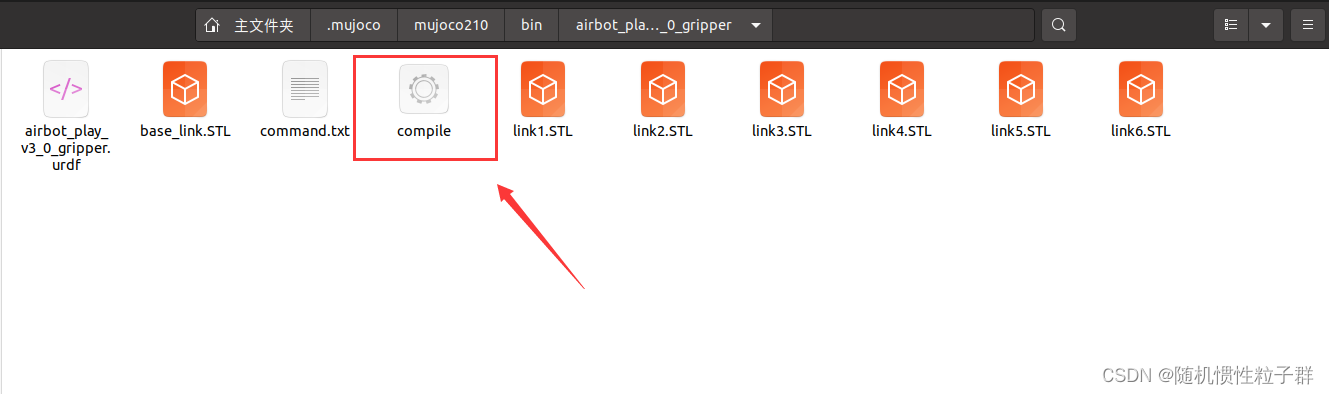
接着在当前目录下新开一个终端,转换指令如下(我的linux系统所使用的指令):
./compile /home/hjx/.mujoco/mujoco210/bin/airbot_play_v3_0_gripper/airbot_play_v3_0_gripper.urdf /home/hjx/.mujoco/mujoco210/bin/airbot_play_v3_0_gripper/airbot_play_v3_0_gripper.xml
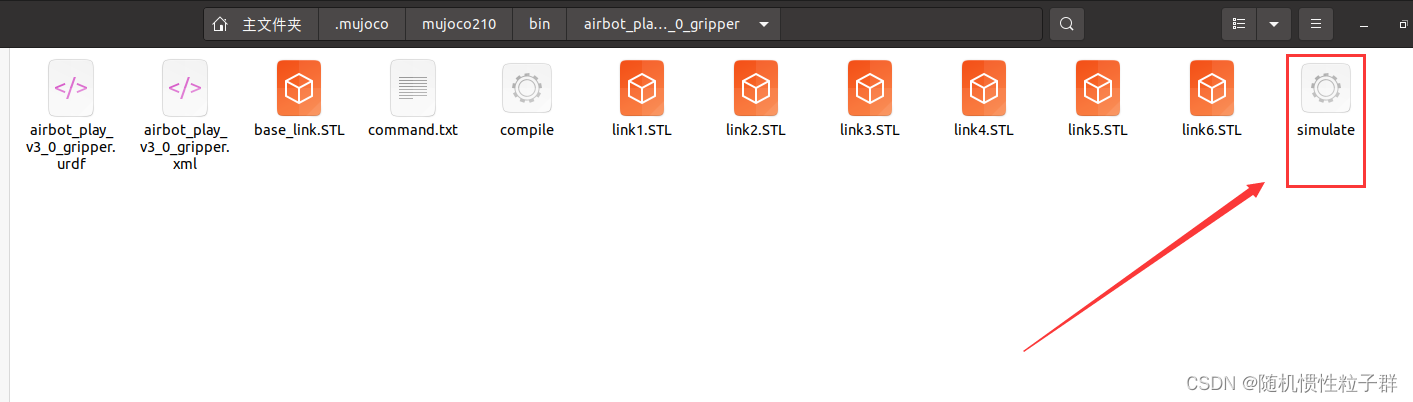
可以发现当前文件夹中生成了urdf文件转换后的xml文件:
3. 测试生成的xml模型文件
将bin目录下simulate文件复制到先前创建的文件夹中:
在当前目录下新开一个终端后使用如下指令:
./simulate airbot_play_v3_0_gripper.xml
或者在mujoco已经在打开的状态下,可以将模型拖进窗口查看效果
./simulate
# 再将xml模型拖进窗口
可以发现xml模型成功显示了出来:
















 1112
1112











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











