







 文章介绍了使用PLC通过模拟量控制电机速度的方法,包括标准化和缩放指令的应用,以及利用高数计数器测量编码器脉冲实现转速监测。此外,还详细讲解了如何在S7-1200中实现直流电机的闭环PID控制,确保电机稳定输出给定转速。
文章介绍了使用PLC通过模拟量控制电机速度的方法,包括标准化和缩放指令的应用,以及利用高数计数器测量编码器脉冲实现转速监测。此外,还详细讲解了如何在S7-1200中实现直流电机的闭环PID控制,确保电机稳定输出给定转速。
一、使用模拟量控制电机速度
首先我们使用PLC模拟给定电机一个电压值来控制电机的速度 电机运行电压在0~10V之间,而PLC自带的模拟量输出参数如下表所示,它的可输出电流为0~20mA。根据欧姆定律,我们可以计算得到电压全速运行需要加10V电压时,电流满量程为20mA,R=U/I=500Ω,也就是说我们需要在电流输出端并联500Ω电阻,输出到电机的电压为全压,电机才全速运行。

由于电阻的价格问题,这里我们使用另外一种方法输出0~10V电压,使用信号版输出驱动电机运行。
信号板

图1 SB 1232信号板
信号版型号为 6ES7232-4HA30-0XB0SIMATIC 模拟输出AQ,SB 1232,1 个模拟输出, +/-10V DC(12 位分辨率)或 0~20mA(11 位分辨率),CPU内部对应值为0-27648,电压与此处的对应值就是模拟量与数字量的关系。电压是我们想输出的0~10V的连续量,而CPU中0对应工程量最小的值(即这里与0V对应),27648对应工程量最大值(即这里与10V对应)。
标准化指令和缩放指令
- 标准化指令 NORM_X
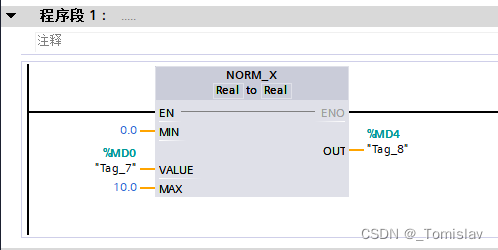
我们现在是通过给定一个电压来控制电机的速度。所以这里的VALUE上是设定电压,那MIN最小值是0,MAX最大值是10V,OUT端输出值为VALUE/(MAX-MIN)且0≤OUT≤1。这里相当于将设定值转换成了一个百分数,假设设定值VALUE=5,那么OUT=50%。
- 缩放指令 SCALE_X
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9721
9721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









