










ROS控制PX4
上一节里我们已经将mavros和仿真gazebo搭建完毕,这一节将通过ros来实现对接PX4固件的目标
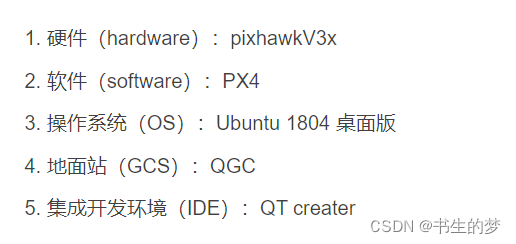
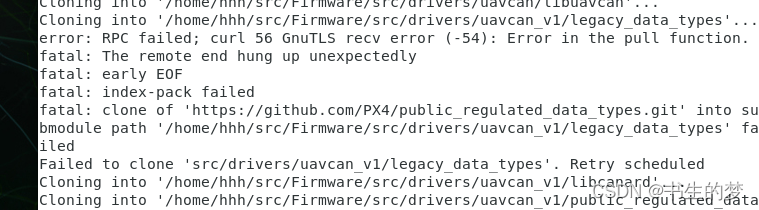
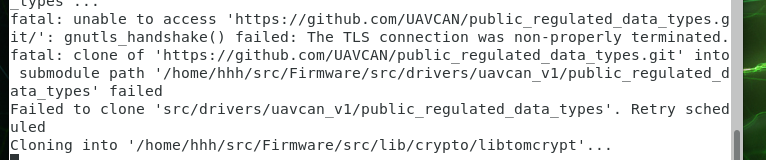
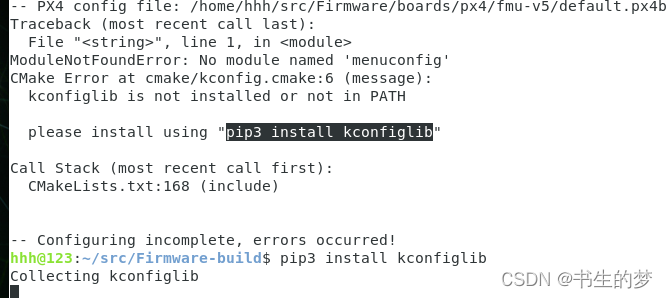
1、搭建PX4开发固件环境
“永远不要使用sudo来修复权限问题,否则会带来更多的权限问题,需要重装系统来解决”。

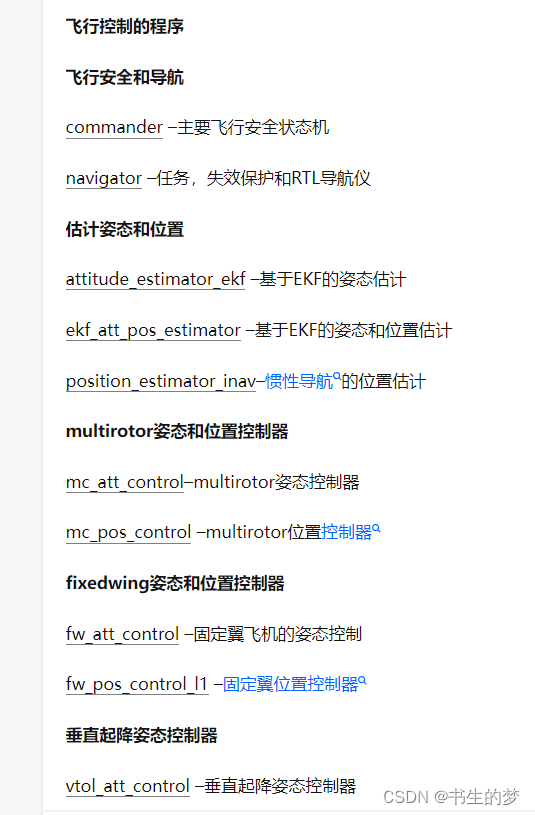
px4源码和匿名一样,用qt(或别的)在linux上进行开发
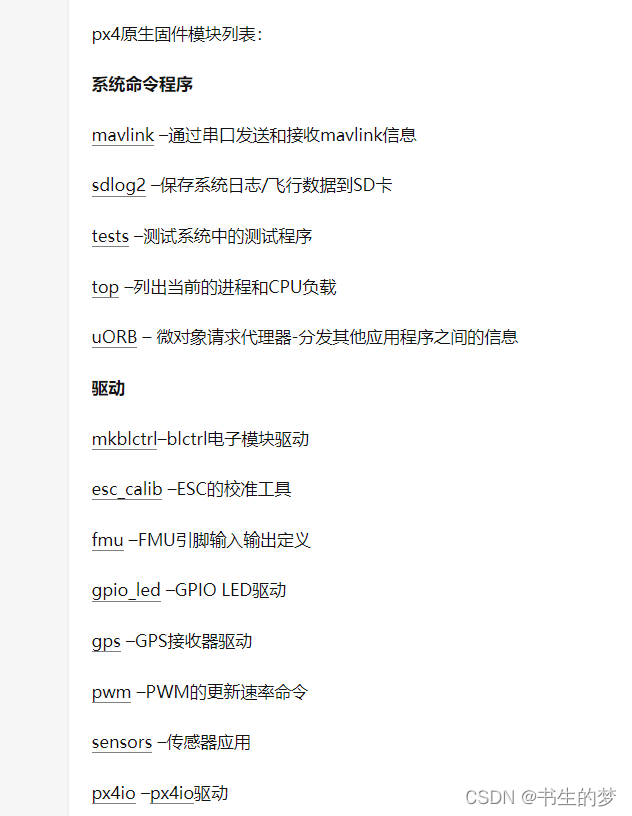
在匿名开发过程里,我们通过keil对飞控源代码进行编译和烧录,通过在源代码里写程序来执行任务
PX4只在源代码里进行部分参数的修改和相关传感器的配置等,任务控制则通过ros来实现,ros通过mavros的mavlink协议来实现与飞控程序的交流,ros则相当于一个自动化控制平台,直接对接px4上的相关接口,而不对源代码进行修改
gozabo仿真是针对ros平台,模拟飞行环境,来仿真
1、在linux上能够实现对px4源代码的修改
2、通过ros来对px4进行对接,ros上可以显示px4,需要pixhawk与机载电脑连接(怎么把px4烧录进pixhawk)
(3、gozabo仿真)
4、qgc通过mavlink对ros进行数据获取与控制(不清楚可不可以)(也不清楚是否可以进行远端桥接,数传或者wifi)
5、qt可以对px4进行修改编译和烧录
6、ros对接px4如果使用gazebo仿真的话需要电脑内存,所以先不执行






















 1577
1577











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









