







 本文详细介绍了编码器的原理、分类,特别是增量式和绝对值编码器,以及光电编码器的特点。重点讨论了双编码器方案在力控中的应用,包括扭矩感知方法和安装方式,以及UR机械臂的双编码器使用策略。
本文详细介绍了编码器的原理、分类,特别是增量式和绝对值编码器,以及光电编码器的特点。重点讨论了双编码器方案在力控中的应用,包括扭矩感知方法和安装方式,以及UR机械臂的双编码器使用策略。
目录
|1.编码器概述

编码器
编码器,是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。当驱动器想要控制电机转动,则U、V、W三相电输出带动电机运转起来,要想使电机转到某个位置或角度,我们成这个位置为目标值,则电机转动过程中就需要知道电机此时转动了多少,在什么位置,否则电机只会一味地转下去。在这个过程中,编码器就充当了反馈的角色,通过编码划分转子旋转一圈的不同位置,再跟随转子转动,并实时将当前转子的位置反馈给驱动器,以便驱动器知道当前的位置是否以及达到目标值,一旦达到目标值,则控制U、V、W三相电的输出,使转子停在该位置保持不动,从而实现了任意位置或角度的控制。
简单来说,编码器的作用就是在电机运行过程中,实时监测电流、转速、转轴的圆周方向相对位置等参数,确定电机本体及被拖动设备状态,进一步地实时控制电机和设备的运行状况,从而实现伺服、调速等许多特定功能。它将旋转部件位置、位移物理量转换成一串数字脉冲信号的旋转式传感器,这些脉冲信号被控制系统采集、处理,发出一系列指令,调整改变设备的运行状态。如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线运动部件的位置、位移物理量。
|2.编码器分类
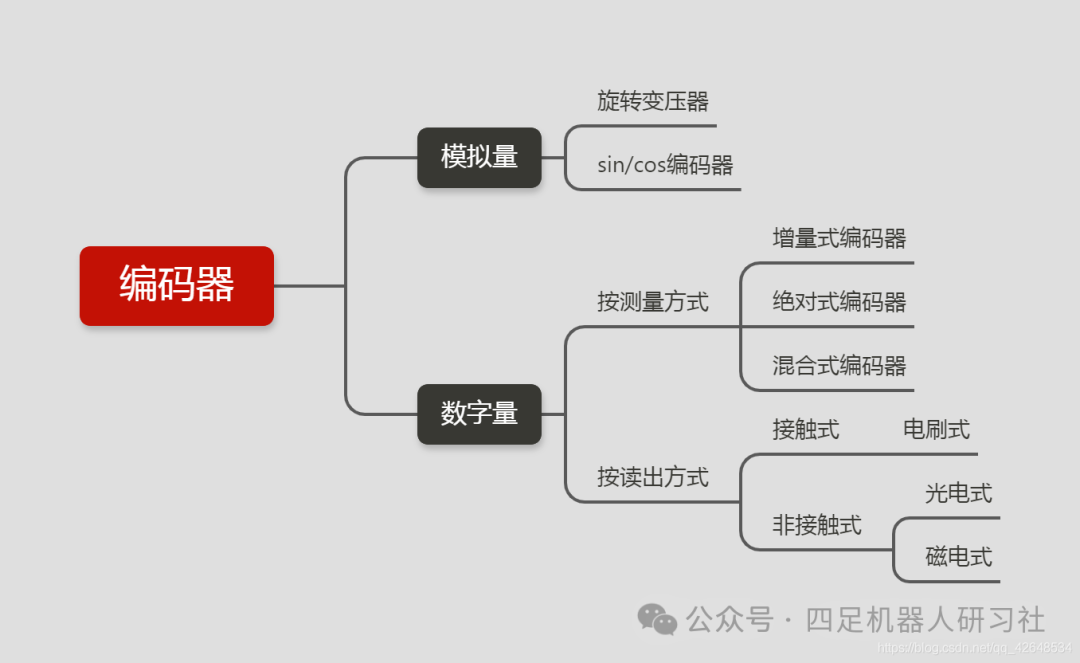
按码盘的刻孔方式划分,可分为增量式和绝对式型,其次,按机械结构划分,可分为旋转编码器和线性编码器,其中旋转编码器的应用最为广泛,也最为常见,用于测量机械设备角度和速度;线性编码器又可分为拉线编码器和支线编码器,多用于测量线性位移。旋转编码器基准光栅是一个刻度均匀的玻璃圆盘(码盘)把角位移转换成电信号,而线性编码器则是玻璃标尺(码尺),把直线位移转换成电信号。
|2.1.增量式编码器和绝对值编码器
增量式编码器&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5581
5581

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









