







目录
1、I2C简介

2、I2C时序单元
2.1 起始条件

2.2 终止条件

2.3 发送一个字节

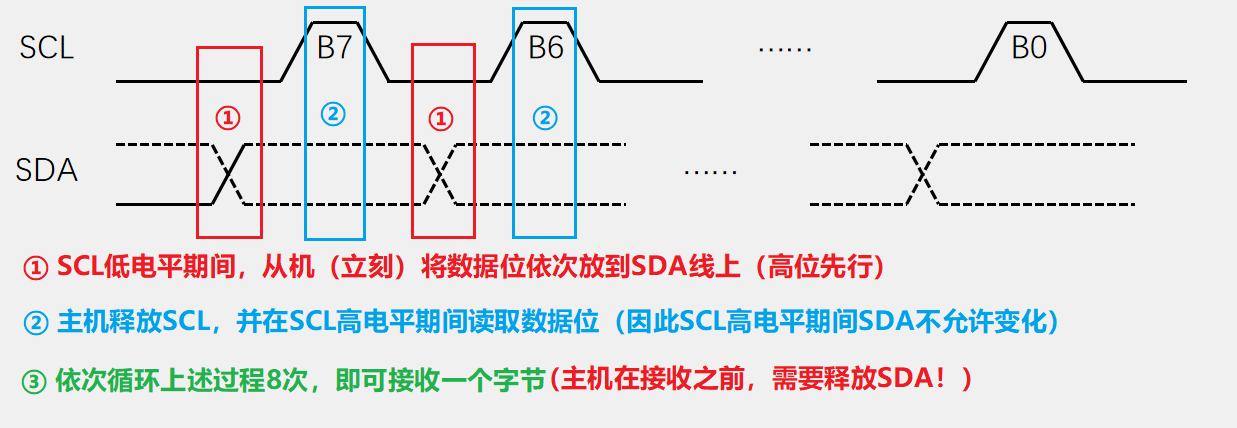
2.4 接收一个字节
2.5 发送应答

2.6 接收应答

3、I2C完整时序
3.1 指定地址写一个字节
指定地址写一个字节的时序分析如下:
如果需要连续写多个字节,只需要最后主机不需要主动拉低SDA,并且重复⑥⑦步,直到写完所有字节,再执行⑧步即可。④~⑦步传输的数据含义是双方约定的,不一定是这个时序中的含义。

3.2 当前地址读一个字节
如果主机还需要继续接收,那么③步应答0,从机继续发送数据(重复②,但是寄存器地址会自增),直到主机不再需要读数据,那么执行③④步表示结束。

3.2 指定地址读一个字节
如果主机还需要继续接收,那么最后重复当前地址读中的③步应答0,从机继续发送数据(重复②,但是寄存器地址会自增),直到主机不再需要读数据,那么执行③④步表示结束。

4、简单软件I2C代码(HAL)
4.1 软件I2C
可以看到除了结束条件,任何一个时序单元,SCL都以低电平结束,便于拼接、避免错误
#include "stm32f1xx_hal.h"
#include "Dealy.h"
//PB6和PB7配置成普通开漏输出模式
#define SCL_PORT GPIOB
#define SDA_PORT GPIOB
#define SCL_PIN GPIO_PIN_6
#define SDA_PIN GPIO_PIN_7
/**
* 函 数:I2C写SCL引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SCL的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCL为低电平,当BitValue为1时,需要置SCL为高电平
*/
void MyI2C_W_SCL(uint8_t BitValue)
{
HAL_GPIO_WritePin(SCL_PORT, SCL_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SCL引脚的电平
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C写SDA引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SDA的电平,范围0~0xFF
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SDA为低电平,当BitValue非0时,需要置SDA为高电平
*/
void MyI2C_W_SDA(uint8_t BitValue)
{
HAL_GPIO_WritePin(SDA_PORT, SDA_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SDA引脚的电平,BitValue要实现非0即1的特性
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C读SDA引脚电平
* 参 数:无
* 返 回 值:协议层需要得到的当前SDA的电平,范围0~1
* 注意事项:此函数需要用户实现内容,当前SDA为低电平时,返回0,当前SDA为高电平时,返回1
*/
GPIO_PinState MyI2C_R_SDA(void)
{
GPIO_PinState BitValue;
BitValue = HAL_GPIO_ReadPin(SDA_PORT, SDA_PIN); //读取SDA电平
Delay_us(10); //延时10us,防止时序频率超过要求
return BitValue; //返回SDA电平
}
/*协议层*/
/**
* 函 数:I2C起始
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Start(void)
{
MyI2C_W_SDA(1); //释放SDA,确保SDA为高电平
MyI2C_W_SCL(1); //释放SCL,确保SCL为高电平
MyI2C_W_SDA(0); //在SCL高电平期间,拉低SDA,产生起始信号
MyI2C_W_SCL(0); //起始后把SCL也拉低,即为了占用总线,也为了方便总线时序的拼接
}
/**
* 函 数:I2C终止
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0); //拉低SDA,确保SDA为低电平
MyI2C_W_SCL(1); //释放SCL,使SCL呈现高电平
MyI2C_W_SDA(1); //在SCL高电平期间,释放SDA,产生终止信号
}
/**
* 函 数:I2C发送一个字节
* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++) //循环8次,主机依次发送数据的每一位
{
MyI2C_W_SDA(Byte & (0x80 >> i)); //使用掩码的方式取出Byte的指定一位数据并写入到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间读取SDA
MyI2C_W_SCL(0); //拉低SCL,主机开始发送下一位数据
}
}
/**
* 函 数:I2C接收一个字节
* 参 数:无
* 返 回 值:接收到的一个字节数据,范围:0x00~0xFF
*/
GPIO_PinState MyI2C_ReceiveByte(void)
{
uint8_t i;
GPIO_PinState Byte = (GPIO_PinState)0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
for (i = 0; i < 8; i ++) //循环8次,主机依次接收数据的每一位
{
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);} //读取SDA数据,并存储到Byte变量
//当SDA为1时,置变量指定位为1,当SDA为0时,不做处理,指定位为默认的初值0
MyI2C_W_SCL(0); //拉低SCL,从机在SCL低电平期间写入SDA
}
return Byte; //返回接收到的一个字节数据
}
/**
* 函 数:I2C发送应答位
* 参 数:Byte 要发送的应答位,范围:0~1,0表示应答,1表示非应答
* 返 回 值:无
*/
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit); //主机把应答位数据放到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间,读取应答位
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
}
/**
* 函 数:I2C接收应答位
* 参 数:无
* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答
*/
GPIO_PinState MyI2C_ReceiveAck(void)
{
GPIO_PinState AckBit; //定义应答位变量
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
AckBit = MyI2C_R_SDA(); //将应答位存储到变量里
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
return AckBit; //返回定义应答位变量
}
4.2 软件I2C读MPU6050寄存器
#include "stm32f1xx_hal.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(Data); //发送要写入寄存器的数据
MyI2C_ReceiveAck(); //接收应答
MyI2C_Stop(); //I2C终止
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_Start(); //I2C重复起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
MyI2C_ReceiveAck(); //接收应答
Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
MyI2C_Stop(); //I2C终止
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
5、STM32硬件I2C
5.1 I2C外设框图

5.2 主机发送流程图
5.3 主机接收流程图

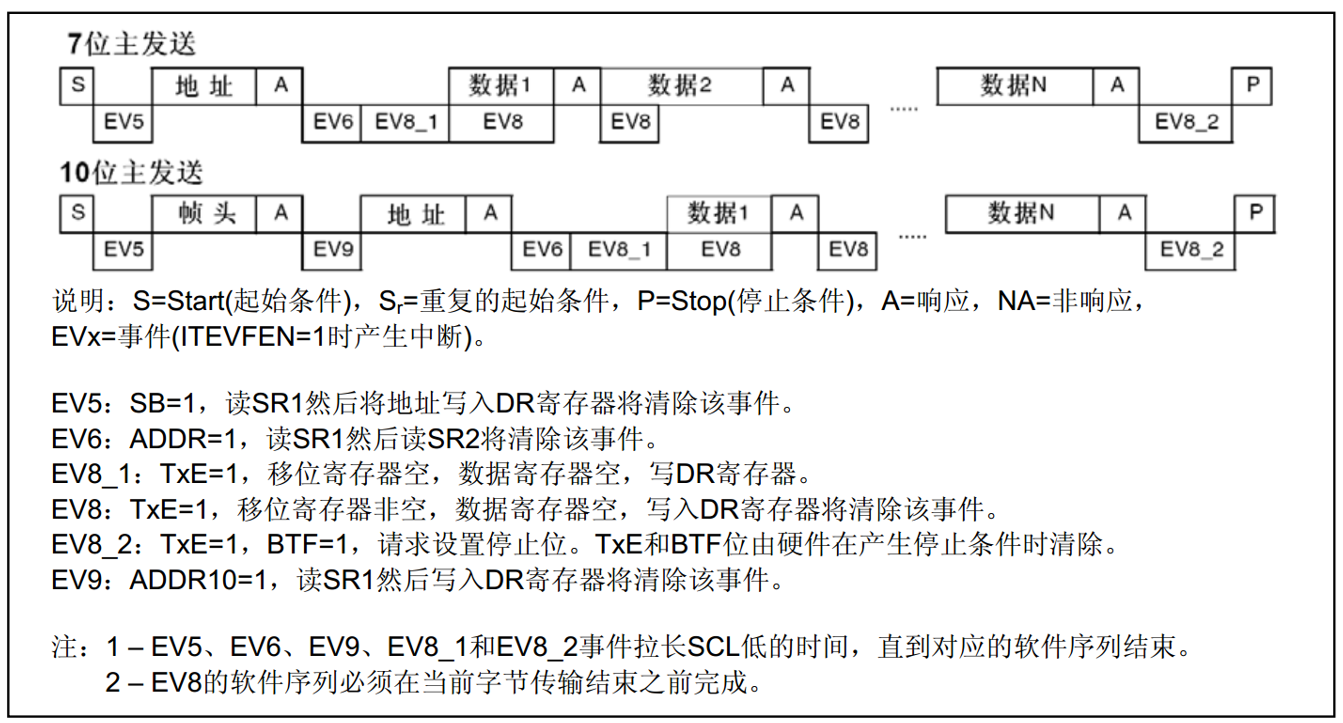
总之,就是看上去比较复杂,实际上只需要写入控制寄存器CR或者数据寄存器DR,就可以控制时序单元的产生;时序单元发生后,查看相应的EV事件(检查状态寄存器SR),等待时序单元完成依次循环,也就是操作----等待----操作----等待......
6、简单硬件I2C代码(HAL)
#include "stm32f1xx_hal.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
extern I2C_HandleTypeDef hi2c1;
static I2C_HandleTypeDef* hi2c_MPU6050 = &hi2c1;
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
//MyI2C_Start(); //I2C起始
//MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(RegAddress); //发送寄存器地址
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(Data); //发送要写入寄存器的数据
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_Stop(); //I2C终止
HAL_I2C_Master_Transmit(hi2c_MPU6050, MPU6050_ADDRESS, (uint8_t*)RegAddress, 1, 10000);
HAL_I2C_Master_Transmit(hi2c_MPU6050, MPU6050_ADDRESS, &Data, 1, 10000);
//或者直接指定地址写:
//HAL_I2C_Mem_Write(hi2c_MPU6050, MPU6050_ADDRESS, RegAddress, 1, &Data, 1, 10000);
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
//MyI2C_Start(); //I2C起始
//MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(RegAddress); //发送寄存器地址
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_Start(); //I2C重复起始
//MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
//MyI2C_ReceiveAck(); //接收应答
//Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
//MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
//MyI2C_Stop(); //I2C终止
HAL_I2C_Mem_Read(hi2c_MPU6050, MPU6050_ADDRESS, RegAddress, 1, &Data, 1, 10000);
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
7、例程下载
链接:https://pan.baidu.com/s/1XFT_WHGA8Nsf7Q52niipnw?pwd=1145
提取码:1145
师承江科大,大部分截图为江科大PPT截图修改,例程由江科大标准库代码改为HAL库














 2481
2481











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









