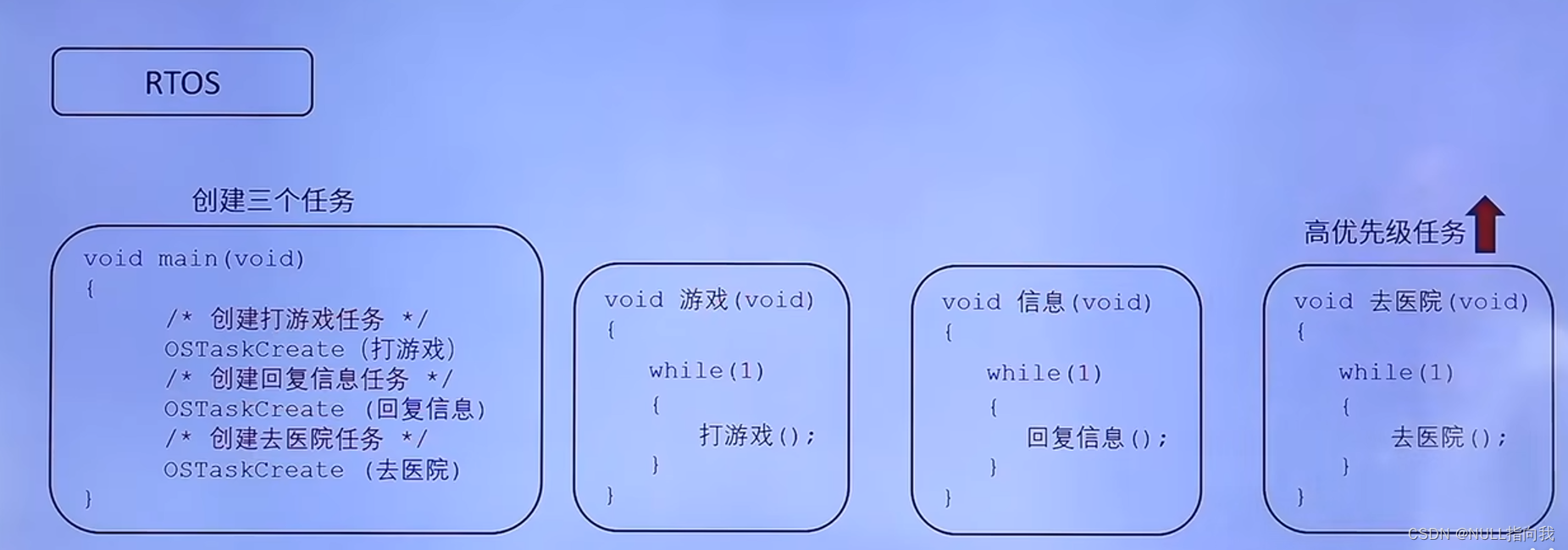
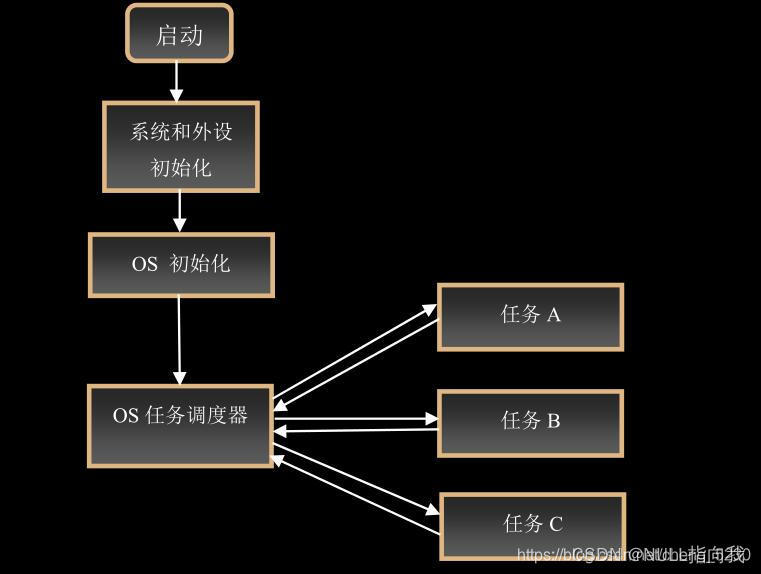
在多任务系统中,可以同时执行多个并行任务,各个任务之间互相独立。通过操作系统执行任务调度而实现宏观上的“并发运行”。从宏观上不同的任务并发运行,好像每个任务都有自己的 CPU 一样。 其实在单一 CPU 的情况下,是不存在真正的多任务机制的,存在的只有不同的任务轮流使用 CPU,所以本质上还是单任务的。但由于 CPU 执行速度非常快,加上任务切换 十分频繁并且切换的很快,所以我们感觉好像有很多任务同时在运行一样。这就是所谓的多任务机制。
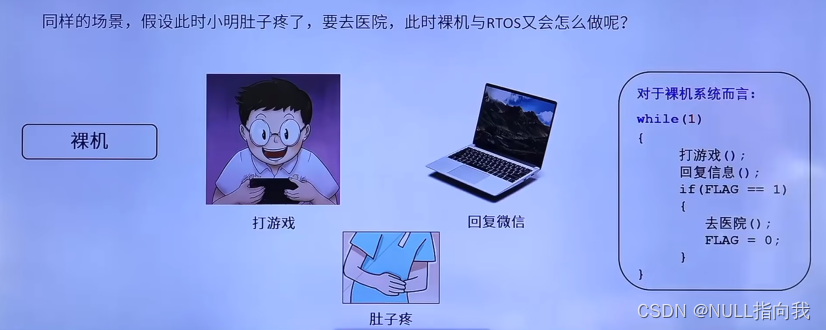
多任务的最大好处是充分利用硬件资源,如在单任务时(大循环结构,如大部分 51
程序)遇到 delay 函数时,CPU 在空转;而在多任务系统,遇到 delay 或需等待资源时系
统会自动运行下一个任务,等条件满足再回来运行先前的任务,这样就充分利用了 CPU,
提高了效率。
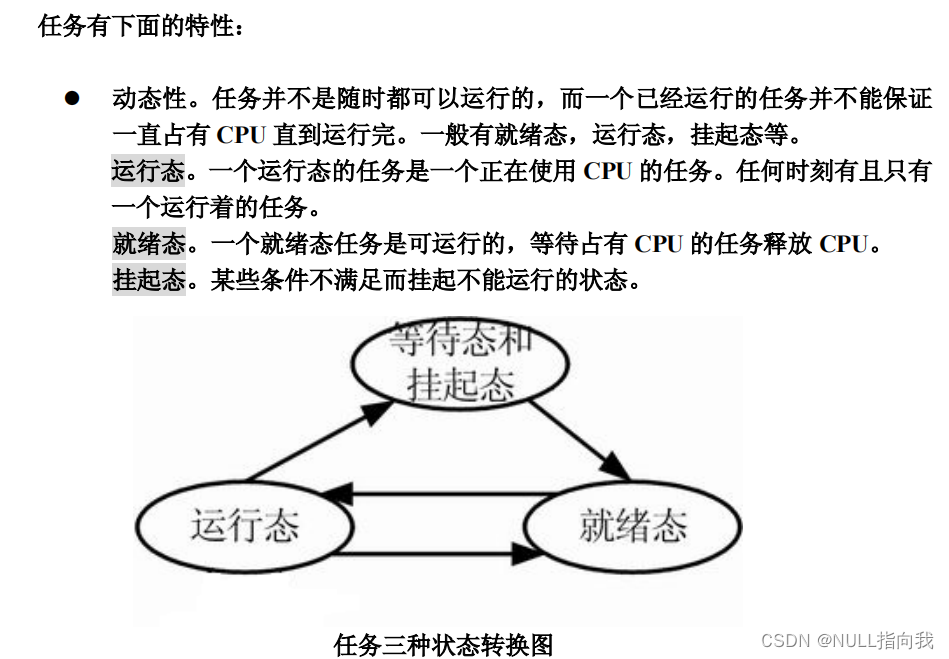
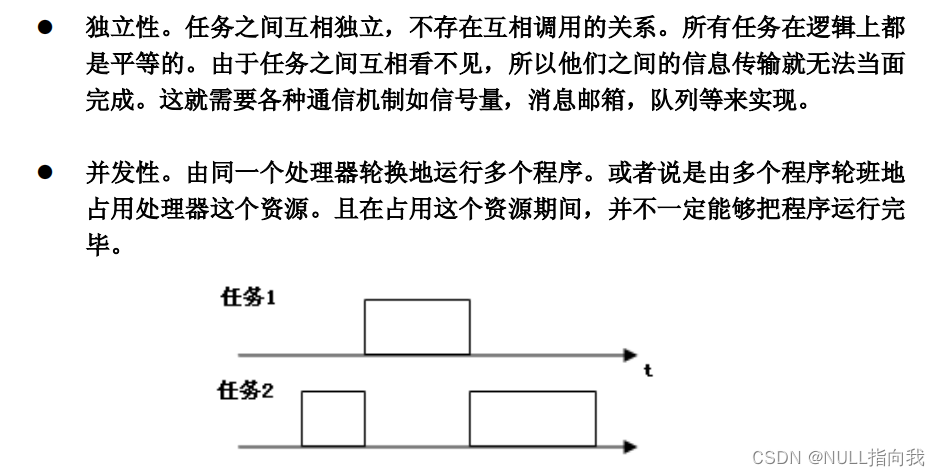
任务的特性:
抢占式调度:
调度的概念,通俗的说就是系统在多个任务中选择合适的任务执行。系统如何知道
何时该执行哪个任务?可以为每个任务安排一个唯一的优先级别,当同时有多个任务就
绪时,优先运行优先级较高的任务。
同时,任务的优先级也作为任务的唯一标识号。代码中都是对标识号来完成对任务
的操作的。如 OSDelPrioRdy(prio),OSSetPrioRdy(prio)等。
不同的优先级对应就绪表中的每一位。低位对应高优先级。优先级 0 的优先权最高,
优先级 31 的优先权最低。
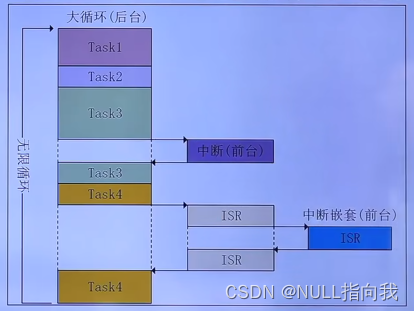
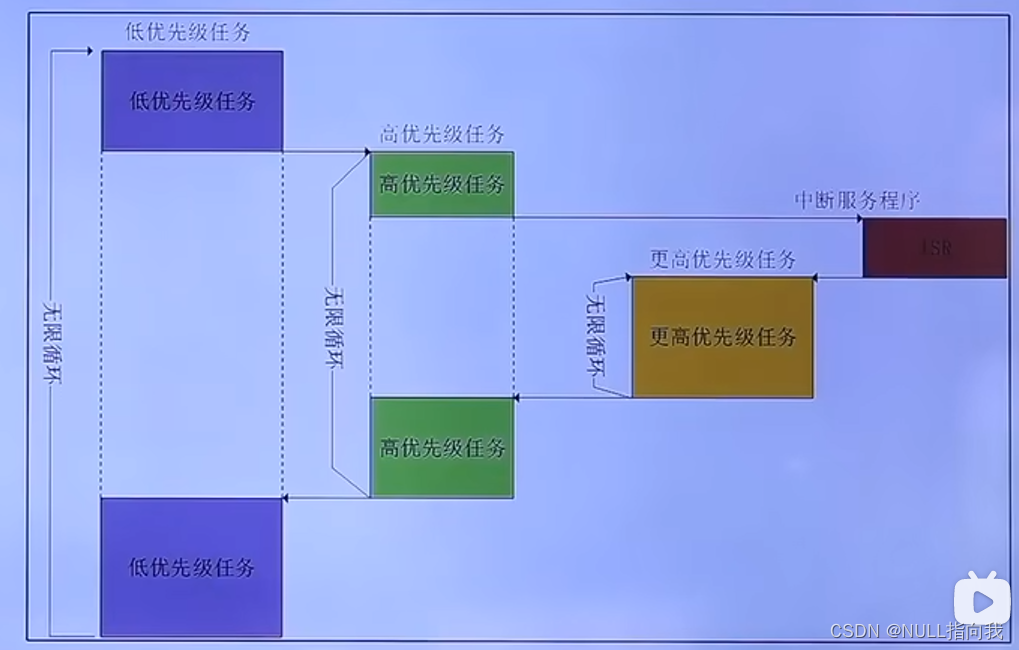
“抢占式调度”是指:一旦就绪状态中出现优先权更高的任务,便立即剥夺当前任务的运行权,把 CPU 分配给更高优先级的任务。这样 CPU 总是执行处于就绪条件下优先级最高的任务。
先来看看中断的过程:当中断来临时,CPU 把当前程序的运行地址,寄存器等现场数据保存起来(一般保存在栈里),然后跳到中断服务程序执行。待执行完毕,再把先前保存的数据装回 CPU 又回到原来的程序执行。这样就实现了两个不同程序的交叉运行。
借鉴这种思想就能实现多任务了:模仿中断的过程就可以实现任务切换运行。
任务切换:
任务切换时,把当前任务的现场数据保存在自己的任务栈里面,再把待运行的任务的数据从自己的任务栈装载到 CPU 中,改变 CPU 的 PC,SP,寄存器等。可以说,任务的切换是任务运行环境的切换。而任务的运行环境保存在任务栈中,也就是说,任务切换的关键是把任务的私有堆栈指针赋予处理器的堆栈指针 SP。 两个任务的切换过程如下:








 “抢占式调度”是指:一旦就绪状态中出现优先权更高的任务,便立即剥夺当前任务的运行权,把 CPU 分配给更高优先级的任务。这样 CPU 总是执行处于就绪条件下优先级最高的任务。
“抢占式调度”是指:一旦就绪状态中出现优先权更高的任务,便立即剥夺当前任务的运行权,把 CPU 分配给更高优先级的任务。这样 CPU 总是执行处于就绪条件下优先级最高的任务。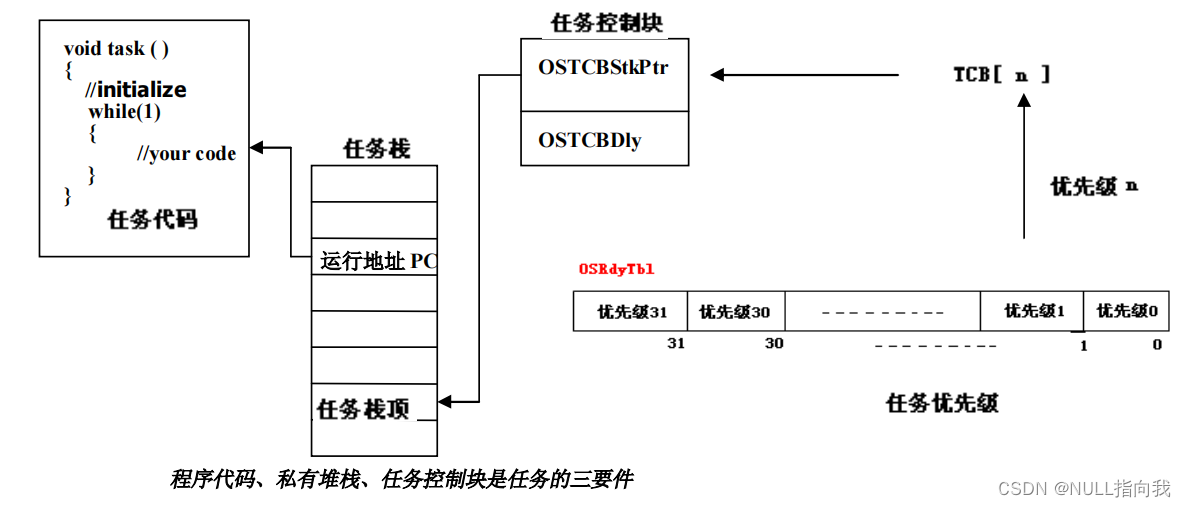 任务私有CPU:只有一个 CPU ,各个任务共享,轮流使用。如何才能实现?先来看看中断的过程:当中断来临时, CPU 把当前程序的运 行地址,寄存器等现场数据保存起来(一般保存在栈里),然后跳到中断服务程序执行。待 执行完毕,再把先前保存的数据装回 CPU 又回到原来的程序执行。这样就实现了两个不同 程序的交叉运行。借鉴这种思想就能实现多任务了:模仿中断的过程就可以实现任务切换运行。任务切换:任务切换时,把当前任务的现场数据保存在自己的任务栈里面,再把待运行的任务 的数据从自己的任务栈装载到 CPU 中,改变 CPU 的 PC , SP ,寄存器等。可以说,任务的 切换是任务运行环境的切换。而任务的运行环境保存在任务栈中,也就是说,任务切换的 关键是把任务的私有堆栈指针赋予处理器的堆栈指针 SP 。 两个任务的切换过程如下:
任务私有CPU:只有一个 CPU ,各个任务共享,轮流使用。如何才能实现?先来看看中断的过程:当中断来临时, CPU 把当前程序的运 行地址,寄存器等现场数据保存起来(一般保存在栈里),然后跳到中断服务程序执行。待 执行完毕,再把先前保存的数据装回 CPU 又回到原来的程序执行。这样就实现了两个不同 程序的交叉运行。借鉴这种思想就能实现多任务了:模仿中断的过程就可以实现任务切换运行。任务切换:任务切换时,把当前任务的现场数据保存在自己的任务栈里面,再把待运行的任务 的数据从自己的任务栈装载到 CPU 中,改变 CPU 的 PC , SP ,寄存器等。可以说,任务的 切换是任务运行环境的切换。而任务的运行环境保存在任务栈中,也就是说,任务切换的 关键是把任务的私有堆栈指针赋予处理器的堆栈指针 SP 。 两个任务的切换过程如下: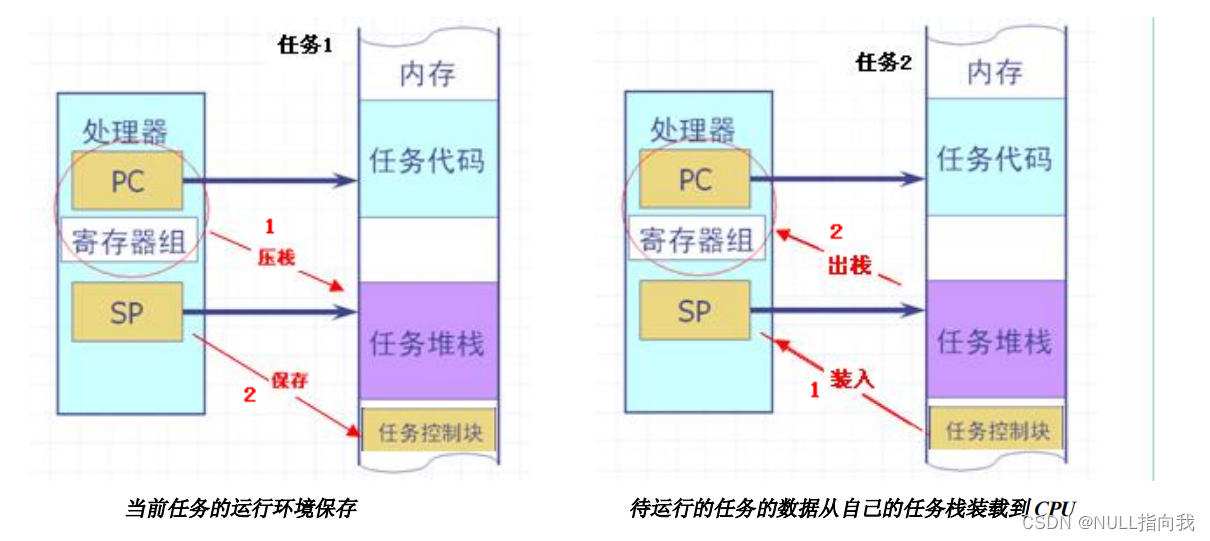
















 8546
8546











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











