






write in advance
实验四,在经历了实验三的失败后,卷土重来。
幸运的是,此次实验很简单,很快就能搞定。

Part one
使用指令查看自己摄像头的设备号,如果报错,且你为虚拟机,可能是未在虚拟机处设置,给出链接
Ubuntu无video设备可能的解决方法-CSDN博客。此处,当你更改了虚拟机USB的设置后,设备需要再次连接
ls /dev/video*接着输入指令下载驱动
sudo apt-get install ros-kinect-usb-com使用roslaunch 指令启动launch 文件
roslaunch usb_cam usb_cam-test.launch此处我遇到了问题,终端显示 select timeout, process has died,给出参考链接
ROS使用usb_cam驱动摄像头出现select timeout然后process has died问题_usb-cam-1 select timeout-CSDN博客
参考blog本身对虚拟机并无效果,评论区有人指出将 虚拟机设置的USB改为3.0。
然后再次运行这条指令,你应该就能运行了。注意如果报错显示没有video设备,需要再次走一遍第一条参考链接。
如果没问题,在确保你下载好书籍配套的教学包后,先后运行两条指令:
roslaunch robot_vision usb_cam.launch这条指令之后,成功的话,你会发现你的摄像头亮了起来。
roslaunch robot_vision face_detector.launch这个launch文件启动face_detector节点,等待你信息的发布。
并且启动 rqt工具
rqt_image_view顺利的话 你会看到一个自己的人脸框,带有绿色的框框。如果有对应的报错,应该很好解决。
Part two
roslaunch robot_sim_demo robot_spawn.launchroslaunch navigation_sim_demo amcl_demo.launchroslaunch navigation_sim_demo view_navigation.launch第一条指令打开gazebo,第三条指令下图窗口

注意该窗口正上方的2D Nav Goal,点击它,选择地图上一个地区,就会出现如图所示的情况。
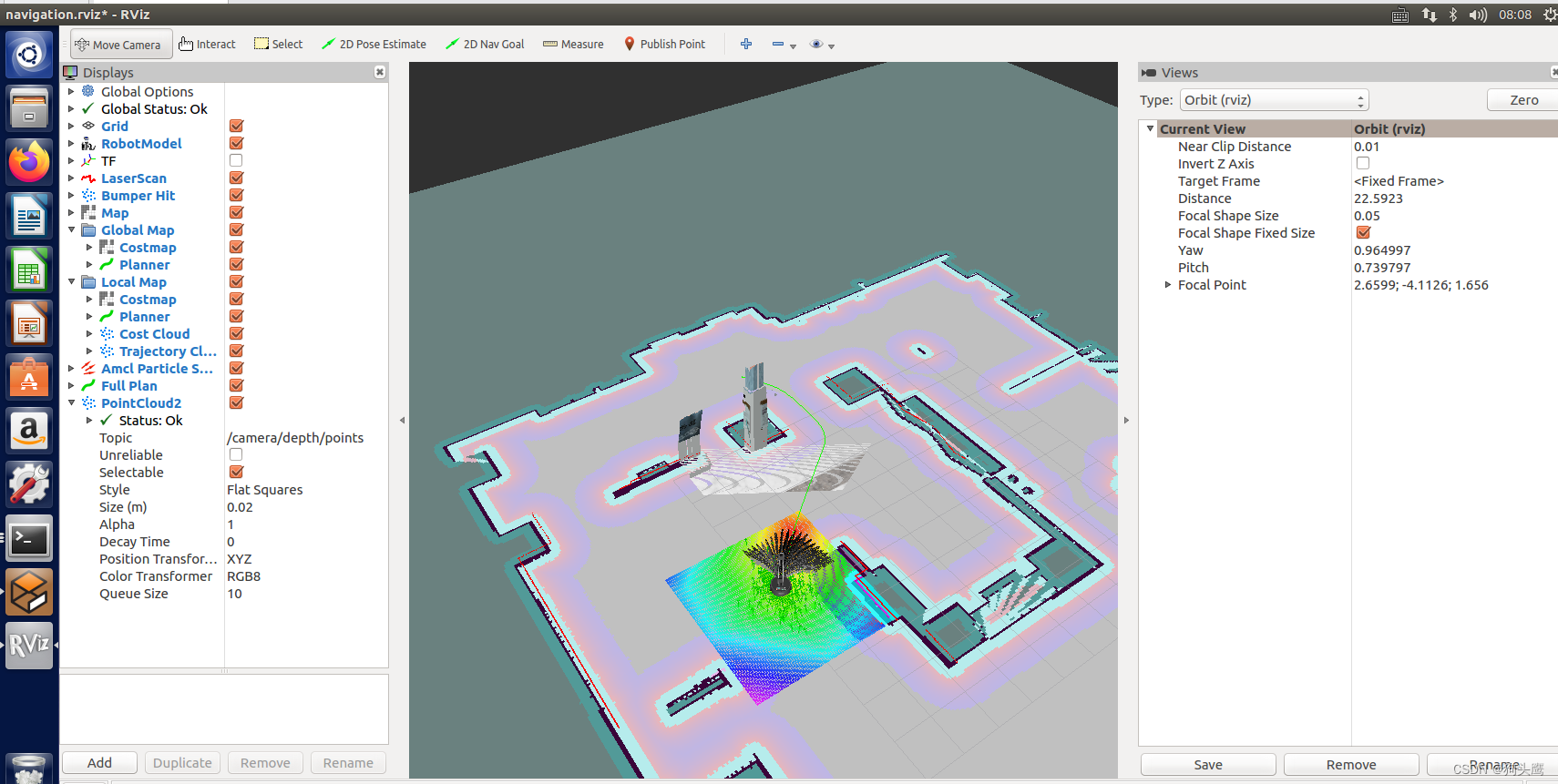
最后机器人会移动到你标定的位置,至此,实验结束。
Summary
至此,我的ROS实验结束,往后该准备期末考试。在我做实验课的过程中,收获了不少这门课程的知识:各种库,插件,SDK,
Ubuntu命令行的使用,















 4818
4818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









