






1.软件环境搭建
算法平台搭建的大致思想为,首先在Prescan中搭建环境并放置传感器/或采用Prescan的simulink Self Port模块用于提取自车信息,首先在Prescan中搭建场景:
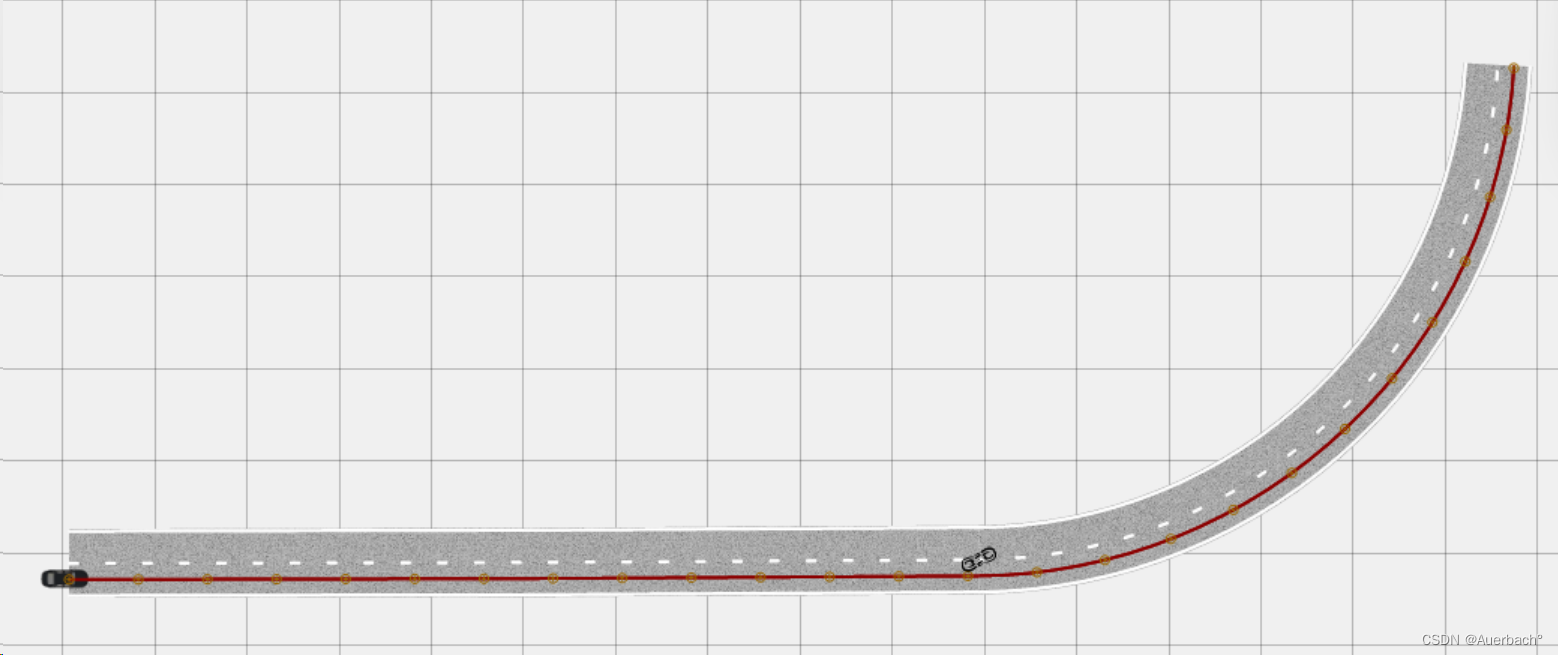
放置路面和如何添加轨迹的操作不是本文重点,由于控制是处于最下层,只有在定位和轨迹规划完成后才能进行运动控制,故首先需要绘制一条轨迹;
在Prescan中选择Carsim的动力学:
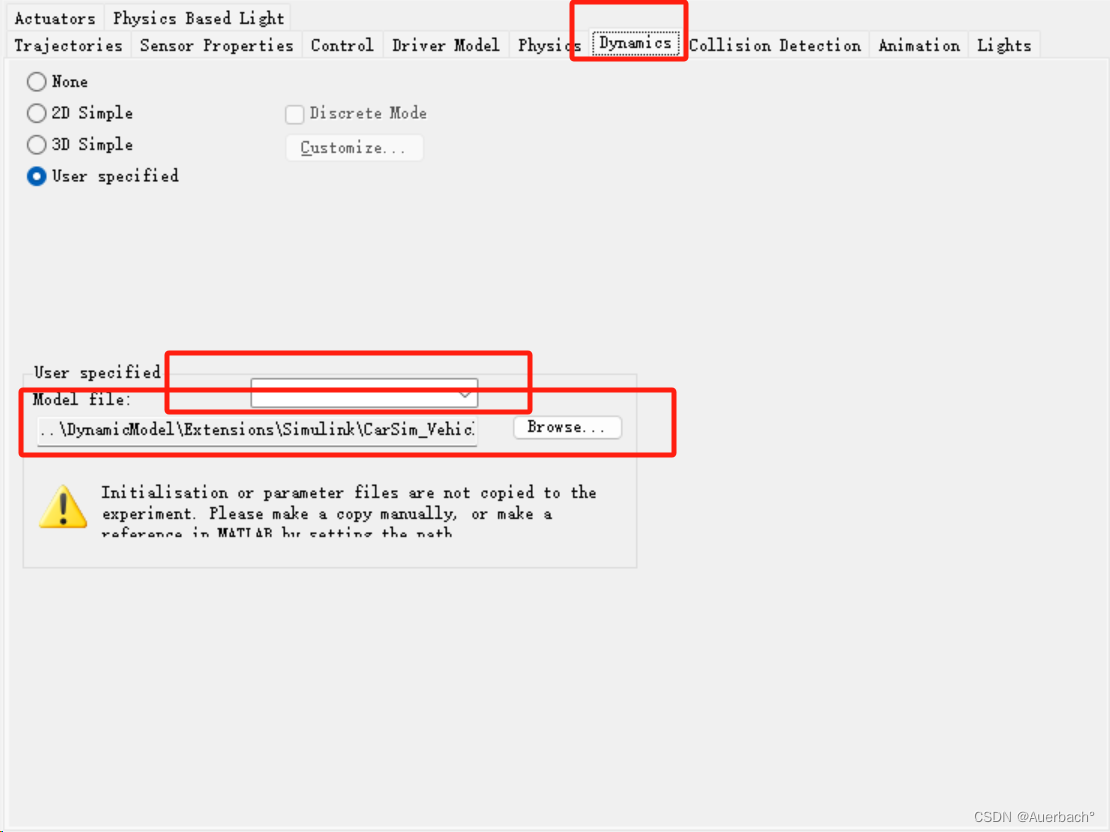
此工程为我们用Carsim生成的动力学的模型路径,打开Prescan中的Carsim模型设置:

上图为笔者自己的路径,注意此模型文件夹在Prescan中而不是在Carsim中,打开Carsim:
设置模块的输入输出:
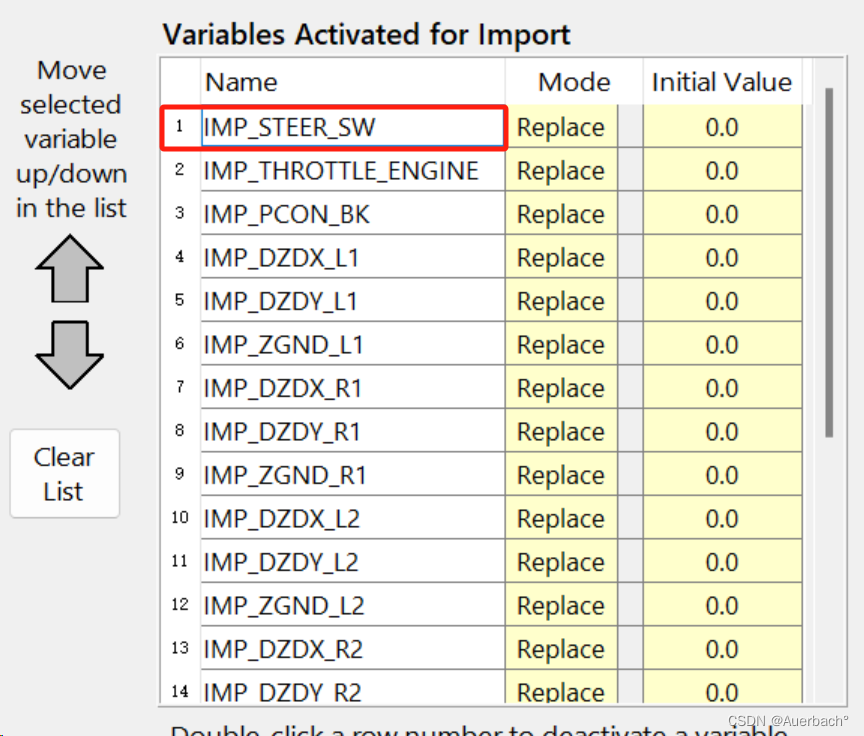
由于我们只做横向控制,故输入只关注方向盘转角。
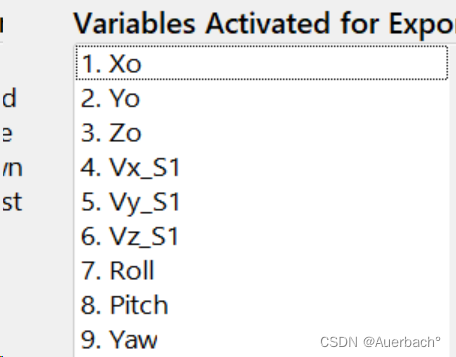
输出从上到下分别为X,Y,Z的坐标,以及沿着X,Y,Z的运动速度,和Roll,Pitch,Yaw三个角度。
Prescan发送到Simulink中,配置好工程的simfile.sim路径为Carsim工程的路径:
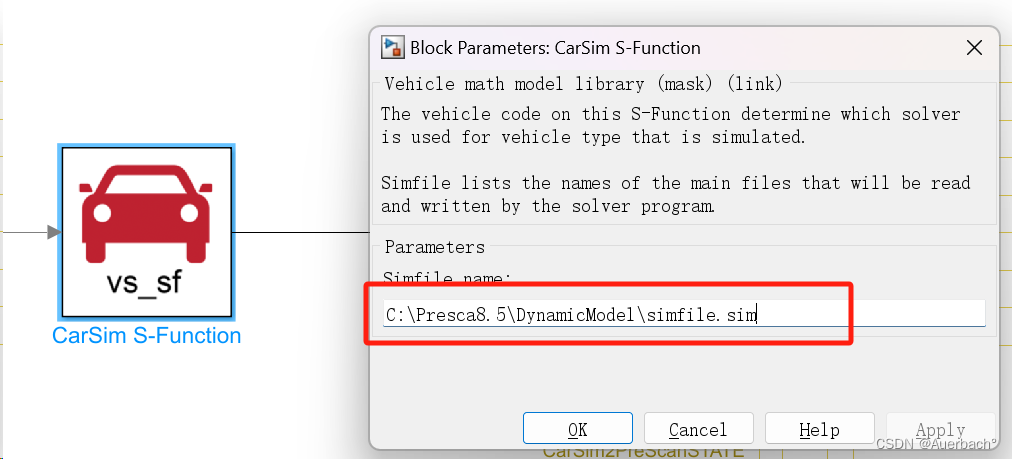
若要对simulink联合仿真工程中Carsim的接口进行更新,更新顺序为:首先更改Carsim的输入输出接口,然后Send to simulink即可完成对动力学接口的更新。
首先不采用carsim动力学,采用Prescan自身动力学,在simulink中添加toWorkspace模块后,运行Prescan工程:
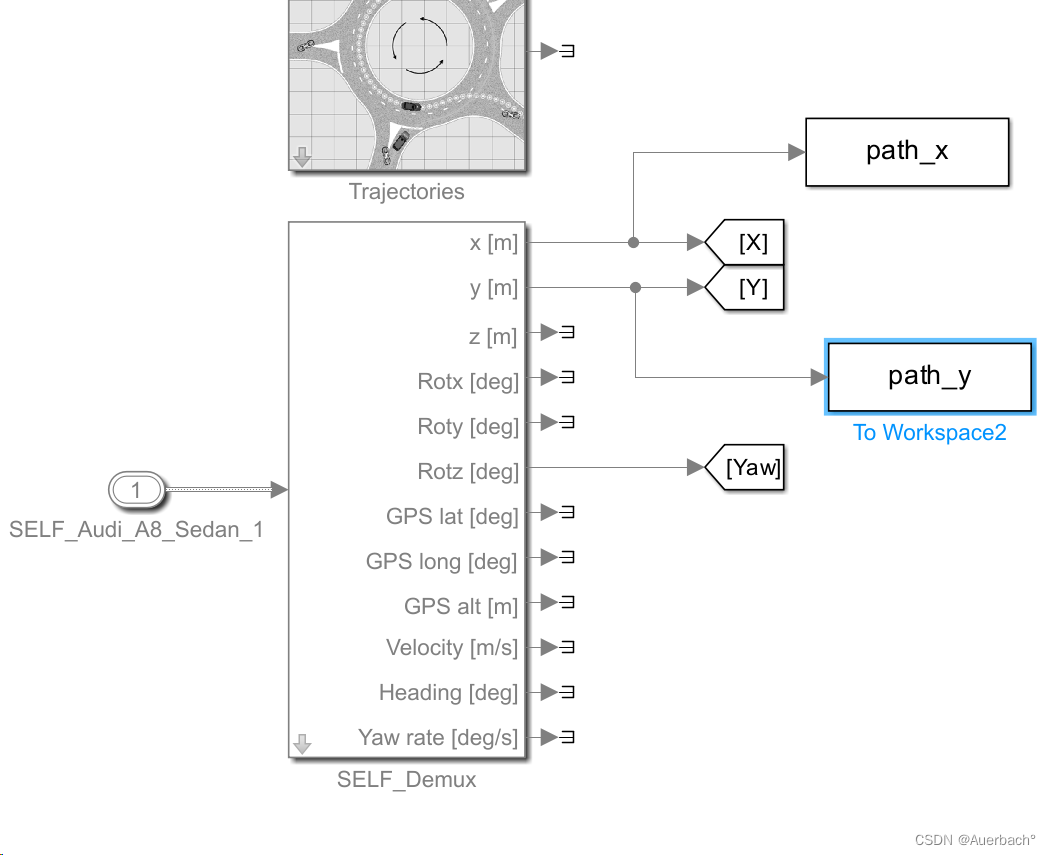
在运行完工程后,编写如下脚本将全局路径点的数据保存到workspace,为防止后面运行时,toWorkspace模块将之前已保存好的全局轨迹点覆盖,故在保存.mat数据后将simulink中toWorkspace模块删去:
path_x=pathX.Data;
path_y=pathY.Data;
save('pathInfo.mat','path_y','path_x','path_y');在simulink中,需对carsim的输出量做如下处理:
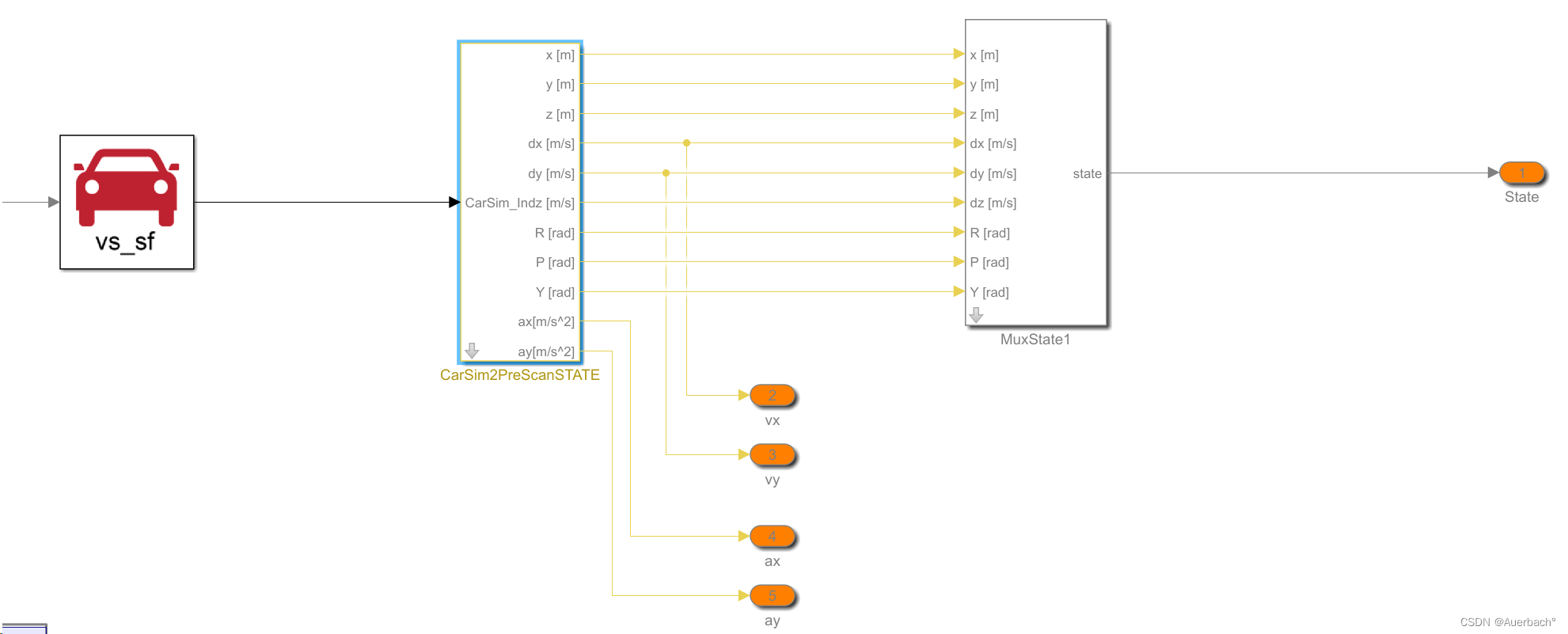
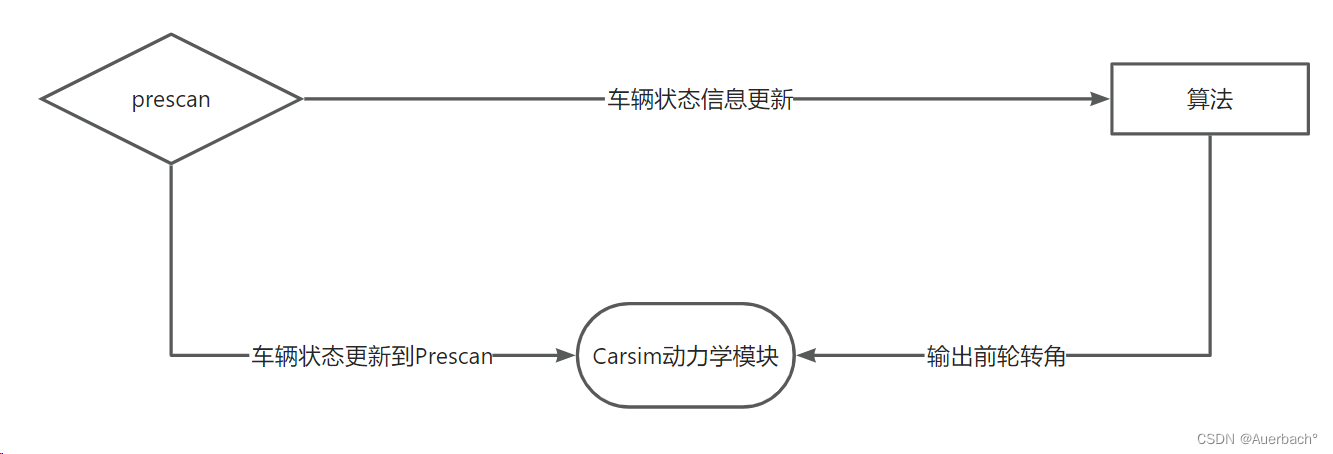
其中MuxState1模块为对Prescan的状态进行更新的模块,Carsim+Prescan的模型在环中,大致的信号流为:
2.纯跟踪算法代码
在左侧的Prescan的Self Port模块中,由于Rotz的坐标系和车辆的坐标系规定相同,故使用RotZ作为车辆航向角,不使用Heading:
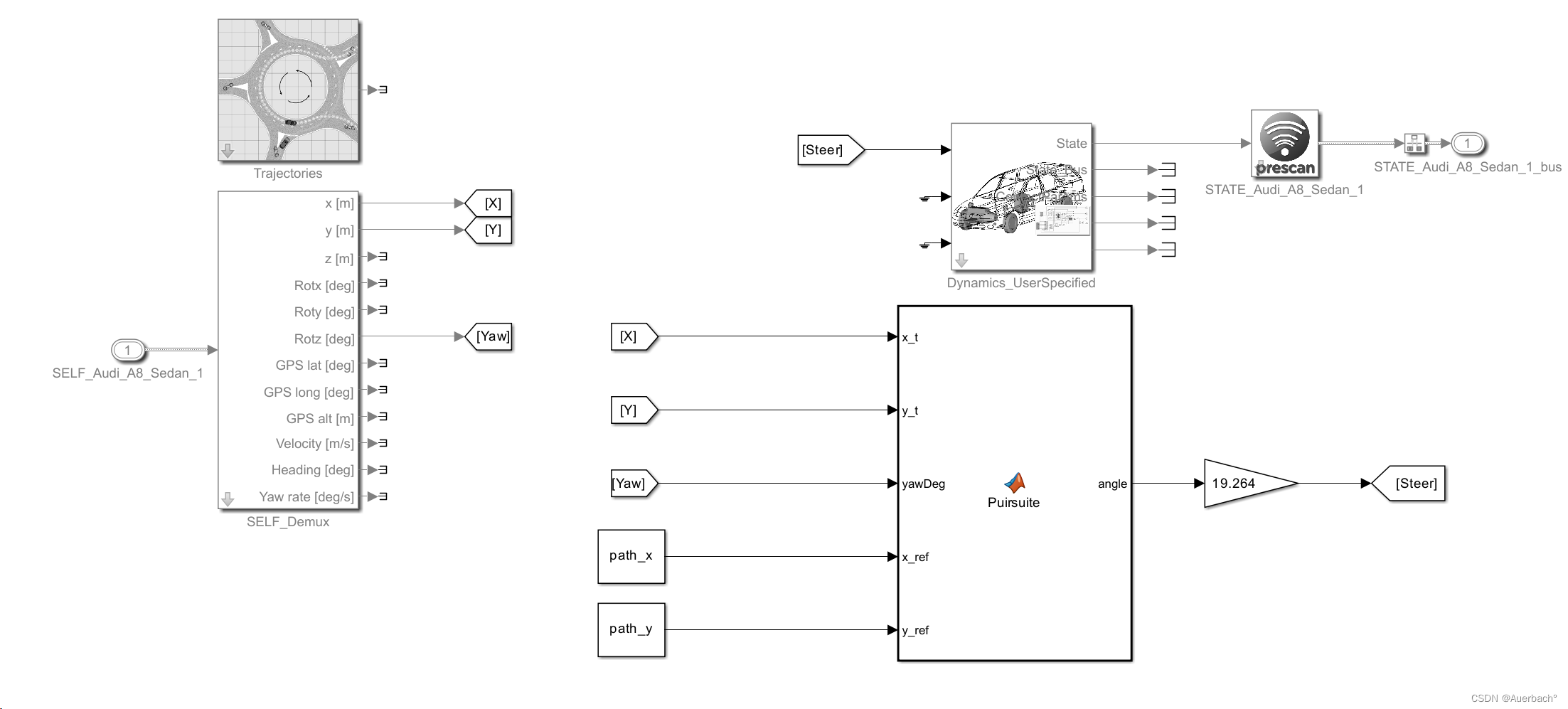
其中X,Y为车辆本时刻的坐标,path_x,path_y为规划轨迹,输出angel为前轮转角,steer为转向盘转角。算法代码如下:
function angle = Puirsuite(x_t,y_t,yawDeg,x_ref,y_ref)
yaw=yawDeg*pi/180;
path_length=length(x_ref);
L=3.165;%车长
h=1.87;%车宽
curve_view_dis=4; % 前视距离
ld=0;
arpha=0;
%%判断自车位置
Distant=zeros(path_length,1);
for i=1:1:path_length
Distant(i)=(x_ref(i)-x_t)^2+(y_ref(i)-y_t)^2;
end
[~, Location]= min(Distant);
%%计算预瞄点
distance=0;
count=1;
for k=Location:1:path_length
distance=distance+sqrt((x_ref(k)-x_ref(k+1))^2+(y_ref(k)-y_ref(k+1))^2);
count=count+1;
if distance>=curve_view_dis %自车与某点距离大于前视距离认为此时的点就是前视点
break;
end
end
x_view=x_ref(Location+count); %找到前视点的坐标
y_view=y_ref(Location+count);
xpf=(x_view-x_t)*cos(yaw)+(y_view-y_t)*sin(yaw);
ypf=(x_view-x_t)*(-sin(yaw))+(y_view-y_t)*cos(yaw);
ld=sqrt(xpf^2+ypf^2); %前视点到自车的距离
arpha=atan(ypf/xpf);
if ld== 0
angle=0;
else
R = ld/(2*sin(arpha)); %转弯半径
angle = atan( L/R)*(180/pi); %算出前轮转角
end
end算法详解如下:首先采用for循环遍历当前车辆位置和所有点之间的距离,并找出距离本车最近的点,将其索引记为Location,在定位的基础上将Location+1的路径索引点作为当下进行一次控制的基础点。
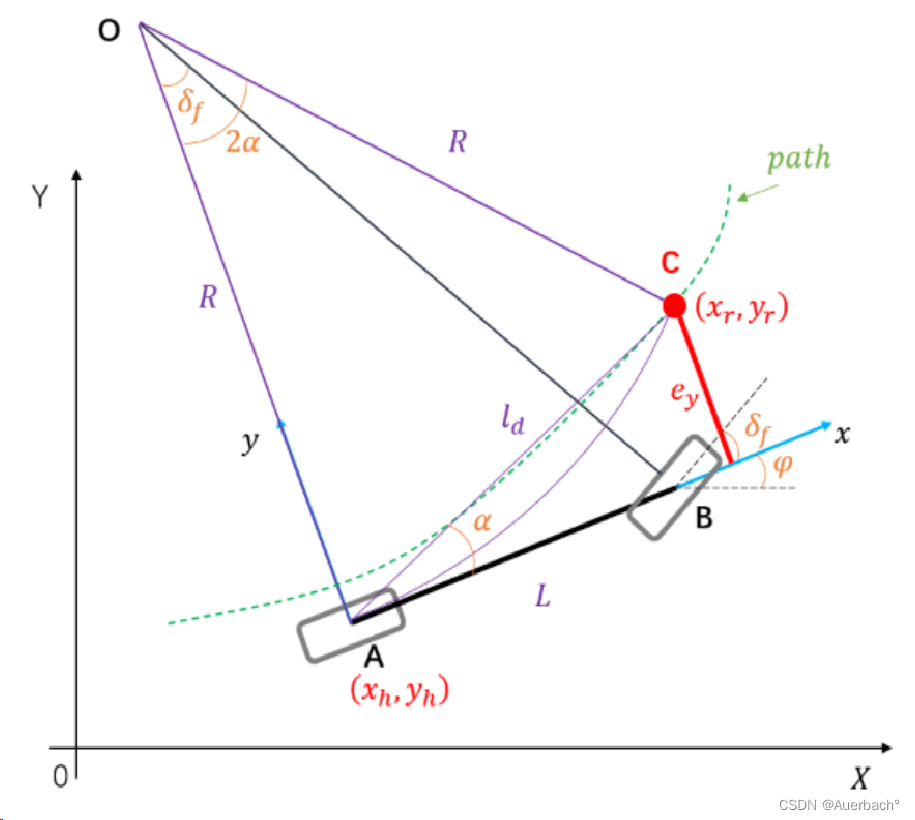
在此基础上,从基础点像后续的规划路径点进行遍历,选择距离大于的点作为预瞄点。由上图的几何关系不难得到:
故要求前轮转角,实际上就是求图中跟踪算法的跟踪半径R,由以下式子确定:
对的确定,涉及到世界坐标系与车辆坐标系的转换,纯跟踪算法确定的车辆坐标系原点为车轮右后轮的坐标,即图中点A的坐标。首先将世界坐标系原点移动到A点有:
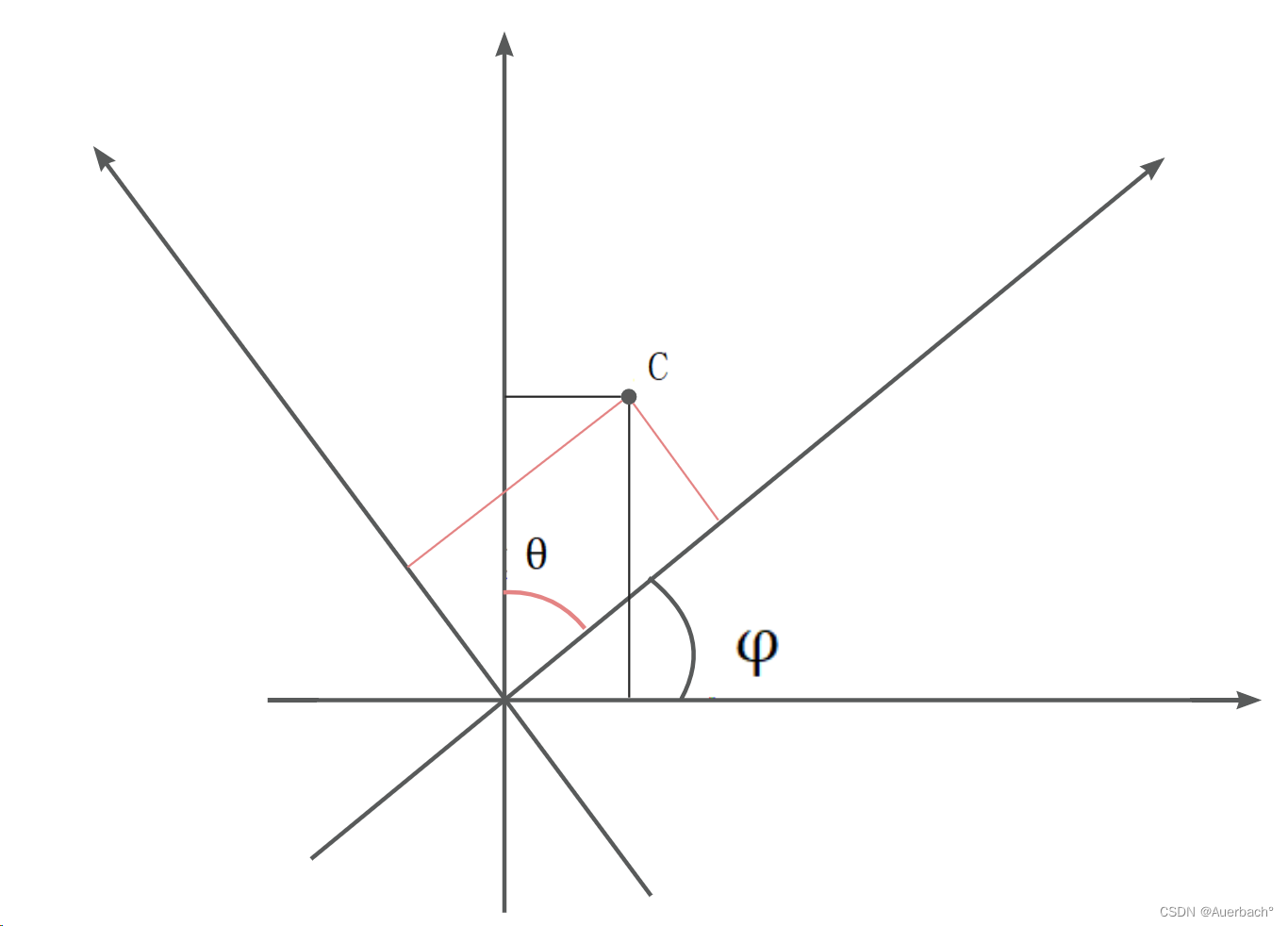
将坐标变换表示为矩阵如下:
最后,需要仿真工程和源码的,可关注我私信领取。














 6361
6361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









