







想学urdf,可是看了那么多资料总感觉不完整,到处翻看查漏补缺,最后云里雾里一团浆糊,写的对新手小白一点都不友好,大多照搬官网(和官网一样我看你有何用,唔,戾气有点重了)所以自己一点一点来吧,跟紧上车,不搞懂不罢休(我很菜,一点ros基础都没有,反反复复试了六七遍才成,所以你就看着这个来吧,有问题也试个六七遍就差不多了)
一、URDF是什么
URDF全称为Unified Robot Description Format,翻译为“统一机器人描述格式”,用于描述机器人结构的格式。可以把URDF想象成一个建模软件,对机器人建模后放到ROS里就可以进行仿真和分析。也可以把URDF文件转换成simscape(物理模型仿真模块组)模型,在Simulink里面进行仿真分析或者控制器设计。
以上是官方的说法,据我了解吧(我也是小白,不一定理解的很到位,只是现在理解的程度,要是我学透彻了再来改),就是想把一个用xx软件(比如 SolidWorks)做好的仿真模型,用一个相关插件,转换出urdf文件,把这个文件弄到ros系统里,再经过一系列操作,实现一个动态的仿真,结合软件和实物,实现实物怎么动,系统里的模型就怎么动
二、URDF的内容是什么
再开始前,你得会Linux系统,不会的话看我另一个专栏学习一下
然后做下准备工作
1、ctrl+shift+t打开的什么你懂得
2、然后创建一个我要学这个专门放东西的名字叫urdf的文件夹:mkdir learn
3、来到这个文件夹下cd learn
4、创建一个名叫my_roboturdf的文本文件:gedit my_robot.urdf
5、把下面的代码输入进去
代码内容讲解:
一个机器人有什么?硬件和软件,模型更关注于硬件。硬件里最关键的就是连杆(link)和关节(joint),二者又有其他属性,每个属性下面又会有不同的信息用于更准确的描述它们,就像一个老板椅分为座部分和腿部分,腿又有支架和滑轮,滑轮又有材质和颜色等如此划分,当把这些描述清楚,也就差不多定义好这把椅子了,机器人也一样
下面这是官网的一段图和代码,结合图和注释理解一下(这就是在系统里呈现的urdf的文本内容)
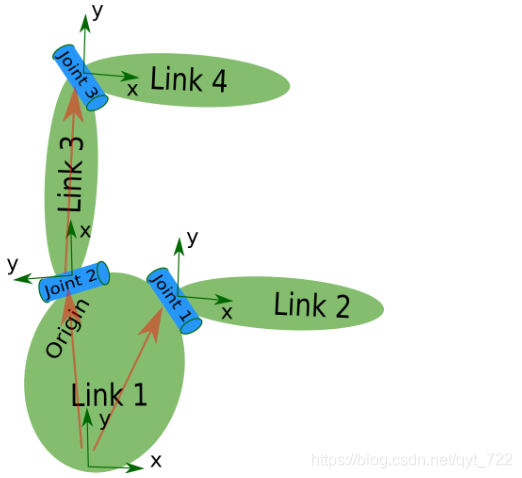
<robot name="test_robot"> #这个机器的名字
<link name="link1" /> #有四个连杆,分别备注他们的名字
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous"> #四个关节之一,他的名字以及类型
<parent link="link1"/> #父连杆
<child link="link2"/> #子连杆
<origin xyz="5 3 0" rpy="0 0 0" /> #指定相对于父link的坐标变换,其中xyz为相对的位置,rpy为相对的方向
<axis xyz="-0.9 0.15 0" /> #指定那个轴为运动轴,如"0 1 0 "表示运动轴为y轴,默认为"1 0 0 "。
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-2 5 0" rpy="0 0 1.57" />
<axis xyz="-0.707 0.707 0" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="5 0 0" rpy="0 0 -1.57" />
<axis xyz="0.707 -0.707 0" />
</joint>
</robot>
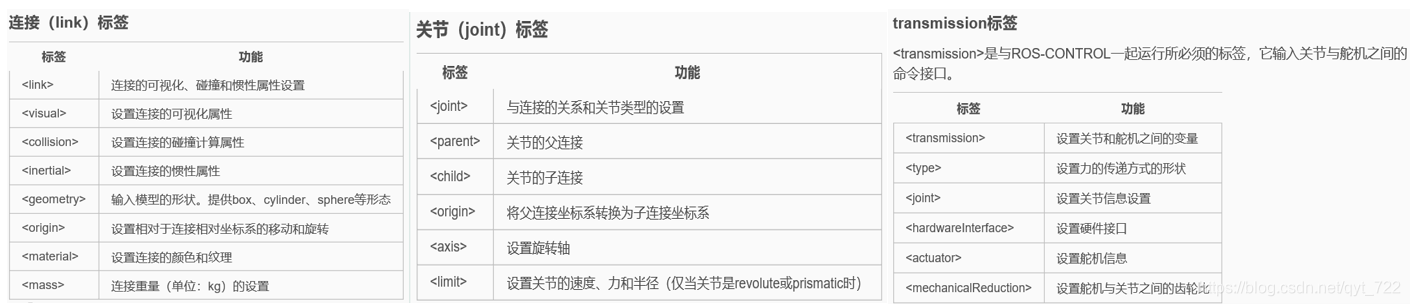
各种标签的意思了解一下:
弄好文件以后,配置一下:
1、sudo apt-get install liburdfdom-tools
需要安装urdfdom作为一个上游的ROS独立包(我也不知道在干嘛,但是管他是什么呢,官网让装就先装上)
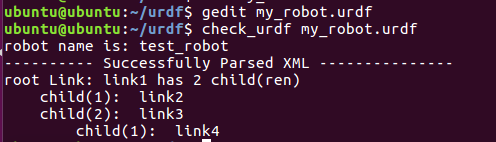
2、check_urdf my_robot.urdf
运行检查命令(更新)(写完了有事没事来一下),出现下图代表你千里之行的第一步成功了(别介意图里我的初始路径,因为开始设置的不是learn而是urdf,后来发现和之后的东西重名了,所以后改的,跟着上面的指令来就好)
3、urdf_to_graphiz my_robot.urdf
尝试用graphiz将URDF可视化,产生两个文件,如下图

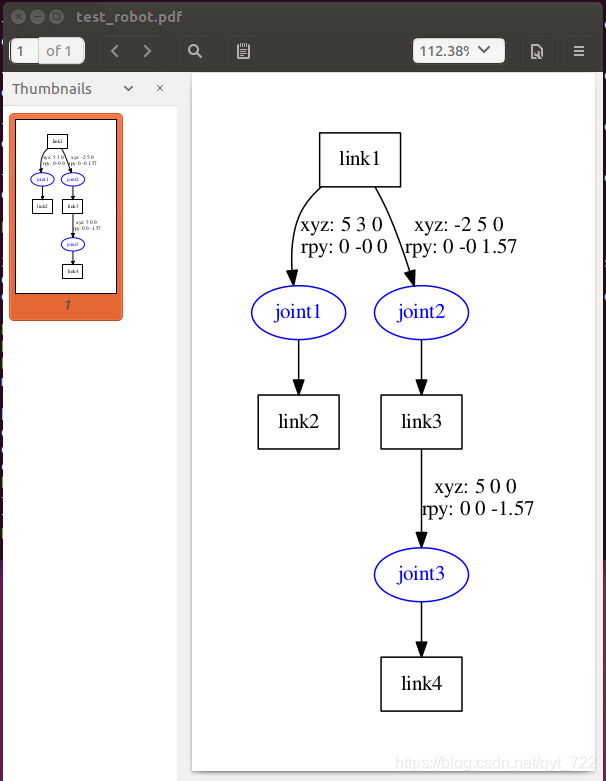
4、evince test_robot.pdf
打开pdf瞅一瞅你的成果,出现下图(如果不成功返回上一目录再试)
三、解析urdf文件
官网上给了这五个指令
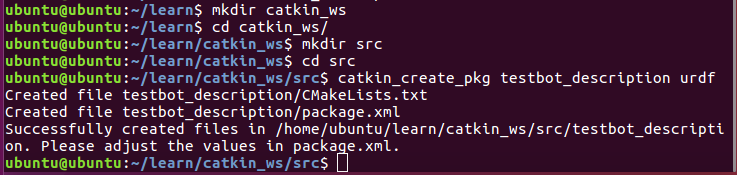
1 cd ~/catkin_ws/src #来到创建好的src文件夹
2 catkin_create_pkg testbot_description urdf #创建功能包
3 cd testbot_description #进入这个包
4 mkdir urdf
5 cd urdf
1、指令1cd ~/catkin_ws/src
第一个是来到了~文件下catkin_ws文件下的src文件,但是我之前想学这些已经自己创建文件了,所以我输入的指令是cd learn/catkin_ws/src,如果你是重头和我来的,那就和我输入一样的指令,如果不是,自己再研究一下
如果不成功是因为你还没创建,别问我是怎么知道的,这时如果Linux指令玩不转这么做:

做完了这些输入第一个我写的指令就行了,其余的照办
至于指令的意思,学过Linux系统的就不用多讲解了,不会的去看我的Linux学习专栏
2、指令2catkin_create_pkg testbot_description urdf创建功能包
这个指令结束后可以看到src里出现一个testbot_description文件夹,里面有这两个文件
3、指令3进入testbot_description,指令4创建一个urdf文件夹,指令5进入其中,现在就到这一步了
在下面就是把刚才写好的urdf文件复制到刚创建的urdf文件里(不一定要跟官网走,其他人写也都和官网一样,明明大家的路径可能不一样的,所以多动脑)
cp learn/my_robot.urdf learn/catkin_ws/src/testbot_description/urdf #我的指令,你的看你的情况写
这时候感觉好麻烦,从图形界面剪切复制过去它不香吗,所以这一堆创建文件、移动文件指令你要看懂了可以直接去home下操作,省的在这里费劲了
好了,接着干,在testbot_description文件夹下创建一个src文件夹,在里面再创建一个parser.cpp文件
文件的内容如下:
#include <urdf/model.h>
#include "ros/ros.h"
int main(int argc, char** argv)
{
ros::init(argc, argv, "my_parser");
if (argc != 2)
{
ROS_ERROR("Need a urdf file as argument");
return -1;
}
std::string urdf_file = argv[1];
urdf::Model model;
if (!model.initFile(urdf_file))
{
ROS_ERROR("Failed to parse urdf file");
return -1;
}
ROS_INFO("Successfully parsed urdf file");
return 0;
}
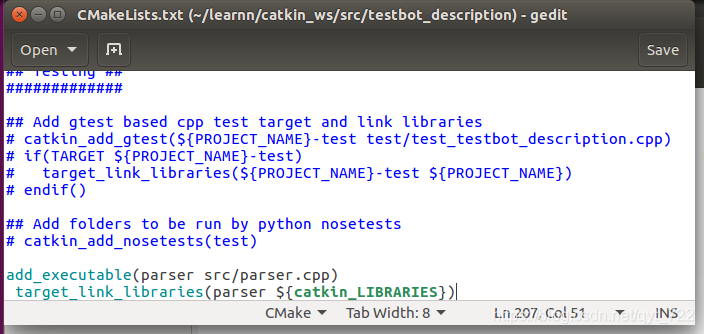
然后在src文件夹下创建一个CMakeList.txt文件,指令gedit CMakeList.txt内容如下
add_executable(parser parser.cpp) #里面的hello要改成你设置的cpp文件名称
target_link_libraries(parser ${catkin_LLIBRARIES})
此时感觉官网上讲得太不清楚了,本菜鸟弄了一下午,最后还是请教别人弄出来的
跟着上一步先进入testbot_description文件夹,里面也有一个CM的文件,打开,再把上面那两句加了src/复制到最下面去
然后,,,终于成功了!
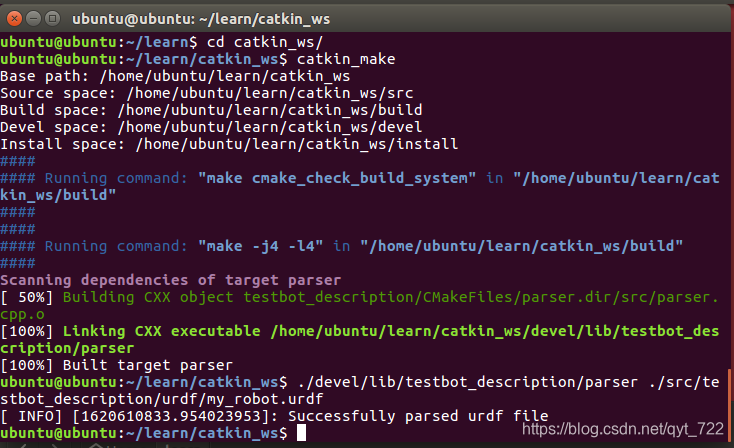
1 cd ~/catkin_ws
2 catkin_make
3 .<path>/parser <path>my_robot.urdf
#例如:./devel/lib/testbot_description/parser ./src/testbot_description/urdf/my_robot.urdf














 4635
4635











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









