




 本文深入分析了PX4飞控系统中垂直起降(vtol)姿态控制的源码,涵盖`vtol_att_control_main`的参数更新、飞行模式控制,以及`standard`、`tailsitter`、`tiltrotor`三种机型的转换逻辑。在转换过程中,计算期望姿态和作动器控制,确保飞行模式间的平滑过渡。
本文深入分析了PX4飞控系统中垂直起降(vtol)姿态控制的源码,涵盖`vtol_att_control_main`的参数更新、飞行模式控制,以及`standard`、`tailsitter`、`tiltrotor`三种机型的转换逻辑。在转换过程中,计算期望姿态和作动器控制,确保飞行模式间的平滑过渡。
px4中vtol姿态控制源码分析
/src/modules/vtol_att_control/文件夹中包含vtol_att_control_main、vtol_type、standard/tailsitter/tiltrotor等文件。下面是主要控制逻辑:
事实上,PX4飞控系统支持所有的垂直起降机型配置:
- 尾座式tailsitter (X/+型布局的双/四旋翼)
- 倾转式tiltrotor (Firefly Y6)
- 复合式standard (飞机+四旋翼)
下面看源码:
vtol_att_control_main
1、订阅并更新参数
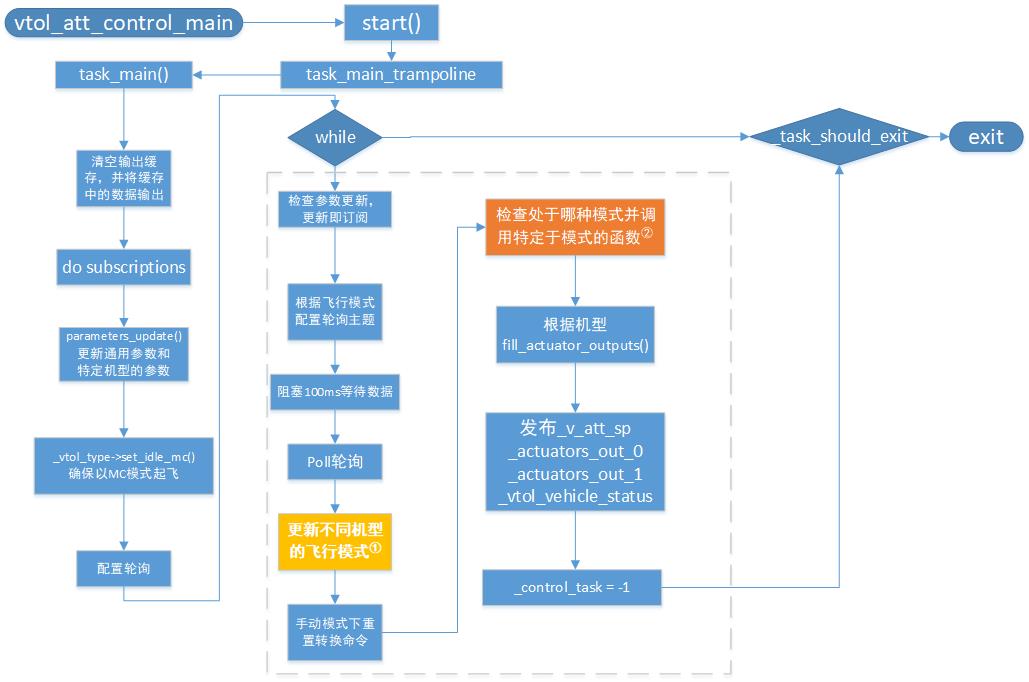
与所有控制器一样,由start函数开启进程,执行任务,指向task_main()
orb订阅各种参数:
/* do subscriptions */ _v_att_sp_sub = orb_subscribe(ORB_ID(vehicle_attitude_setpoint)); _mc_virtual_att_sp_sub = orb_subscribe(ORB_ID(mc_virtual_attitude_setpoint)); _fw_virtual_att_sp_sub = orb_subscribe(ORB_ID(fw_virtual_attitude_setpoint)); _mc_virtual_v_rates_sp_sub = orb_subscribe(ORB_ID(mc_virtual_rates_setpoint)); _fw_virtual_v_rates_sp_sub = orb_subscribe(ORB_ID(fw_virtual_rates_setpoint)); _v_att_sub = orb_subscribe(ORB_ID(vehicle_attitude)); _v_control_mode_sub = orb_subscribe(ORB_ID(vehicle_control_mode)); _params_sub = orb_subscribe(ORB_ID(parameter_update)); _manual_control_sp_sub = orb_subscribe(ORB_ID(manual_control_setpoint)); _local_pos_sub = orb_subscribe(ORB_ID(vehicle_local_position)); _local_pos_sp_sub = orb_subscribe(ORB_ID(vehicle_local_position_setpoint)); _pos_sp_triplet_sub = orb_subscribe(ORB_ID(position_setpoint_triplet)); _airspeed_sub = orb_subscribe(ORB_ID(airspeed)); _vehicle_cmd_sub = orb_subscribe(ORB_ID(vehicle_command)); _tecs_status_sub = orb_subscribe(ORB_ID(tecs_status)); _land_detected_sub = orb_subscribe(ORB_ID(vehicle_land_detected)); _actuator_inputs_mc = orb_subscribe(ORB_ID(actuator_controls_virtual_mc)); _actuator_inputs_fw = orb_subscribe(ORB_ID(actuator_controls_virtual_fw)); parameters_update(); // initialize parameter cacheparameters_update()更新通用参数和特定机型的参数。
2、_vtol_type->set_idle_mc()确保飞机以mc模式贴地起飞。
3、进入while循环首先检查参数更新
vehicle_control_mode_poll() //检查飞机控制模式的轮询
手动模式下重置转换命令;
更新不同机型的飞行模式①:_vtol_type->update_vtol_state();
检查飞机处于哪种模式并调用特定函数②:
ROTARY_WING:主要函数为_vtol_type->update_mc_state(); 计算期望姿态
mc_virtual_att_sp_poll(); // vehicle is in rotary wing mode _vtol_vehicle_status.vtol_in_rw_mode = true; _vtol_vehicle_status.vtol_in_trans_mode = false; // got data from mc attitude controller _vtol_type->update_mc_state(); fill_mc_att_rates_sp();
FIXED_WING:主要函数为_vtol_type->update_fw_state(); 计算期望姿态
fw_virtual_att_sp_poll(); // vehicle is in fw mode _vtol_vehicle_status.vtol_in_rw_mode = false; _vtol_vehicle_status.vtol_in_trans_mode = false; _vtol_type->update_fw_state(); fill_fw_att_rates_sp();
TRANSITION:主要函数为_vtol_type->update_transition_state();计算转换时的姿态期望值
mc_virtual_att_sp_poll(); fw_virtual_att_sp_poll(); // vehicle is doing a transition _vtol_vehicle_status.vtol_in_trans_mode = true; _vtol_vehicle_status.vtol_in_rw_mode = true; //making mc attitude controller work during transition _vtol_vehicle_status.in_transition_to_fw = (_vtol_type->get_mode() == TRANSITION_TO_FW); _vtol_type->update_transition_state(); fill_mc_att_rates_sp();
4、填充actuator输出并发布姿态期望值
发布的内容:
vehicle_attitude_setpoint // 飞机期望姿态
actuator_controls_0 // MC模式的作动器控制
actuator_controls_1 // FW模式的作动器控制
vtol_vehicle_status // 飞行状态
5、标志位_control_task = -1,退出任务。
总结流程图如下:
vtol_type.cpp
VTOL_mode:
ROTARY_WING
TRANSITION_TO_FW,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1450
1450

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









