







通信系统
该系统负责地面控制站与联网飞行器之间的所有交互。该通信系统实现 MAVLink 协议,处理消息交换,管理飞行器状态跟踪,并提供文件传输和参数管理接口。
概述
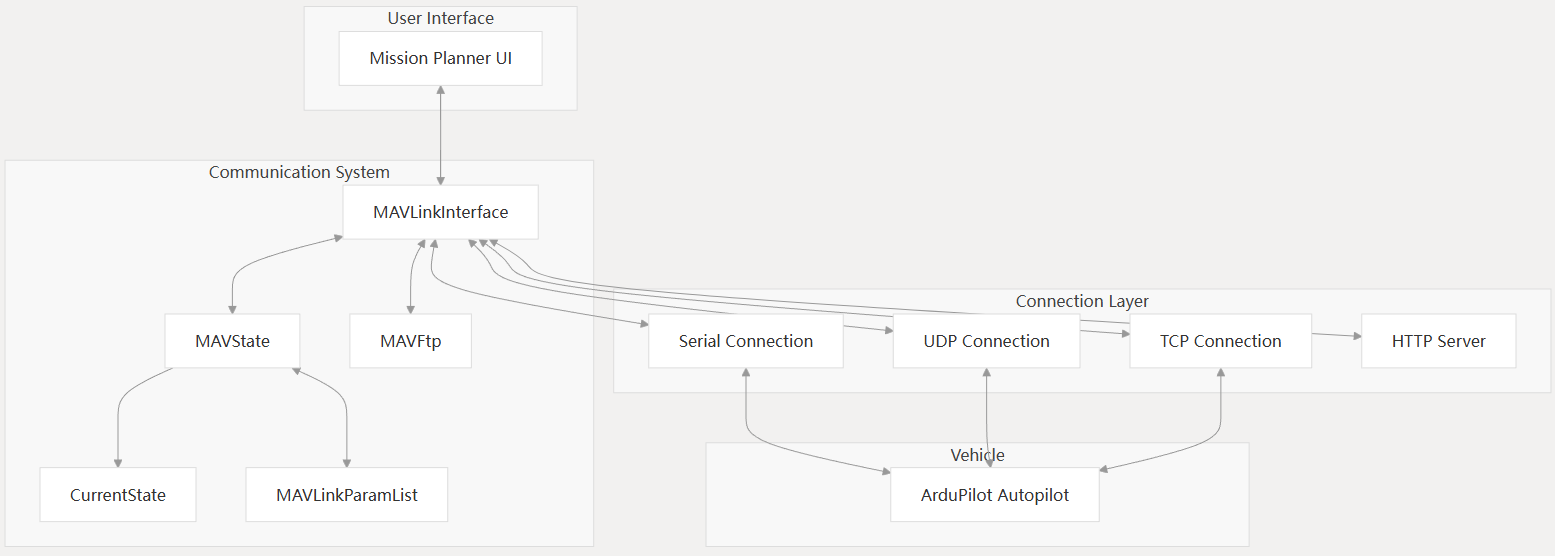
任务规划器通信系统是实现与基于 ArduPilot 的飞行器进行可靠双向通信的关键基础设施。其职责包括:
- 建立并维持与车辆的连接
- 发送和接收 MAVLink 消息
- 跟踪车辆状态和参数
- 支持GCS与车辆之间的文件传输
- 通过参数管理车辆配置
- 支持多辆车辆同时连接
该系统围绕MAVLink协议(微型飞行器链路)设计,这是一种专为无人驾驶飞行器设计的轻量级消息传递协议。
关键组件
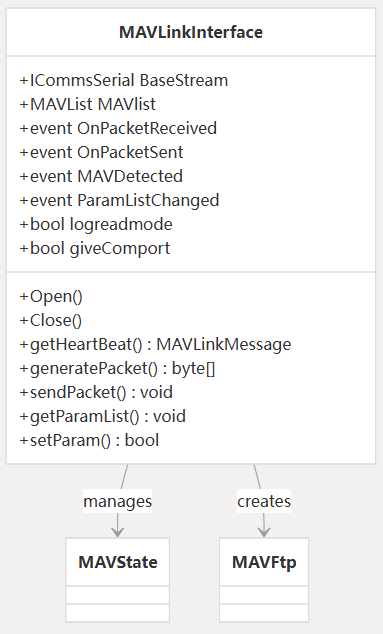
MAVLink接口
该类MAVLinkInterface是通信系统的中心枢纽,负责管理与车辆的连接、处理数据包的发送和接收,并维护已连接车辆的列表。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1438
1438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









