






 本文提出了一种基于深度强化学习的四旋翼无人机航线跟随方法,通过动力学模型和模糊化的状态输入,使无人机能应对未知环境并实现高精度跟随。仿真结果证明了其有效性和鲁棒性。
本文提出了一种基于深度强化学习的四旋翼无人机航线跟随方法,通过动力学模型和模糊化的状态输入,使无人机能应对未知环境并实现高精度跟随。仿真结果证明了其有效性和鲁棒性。
源自:指挥与控制学报
作者:杨志鹏 李波 甘志刚 梁诗阳
“人工智能技术与咨询” 发布
摘 要
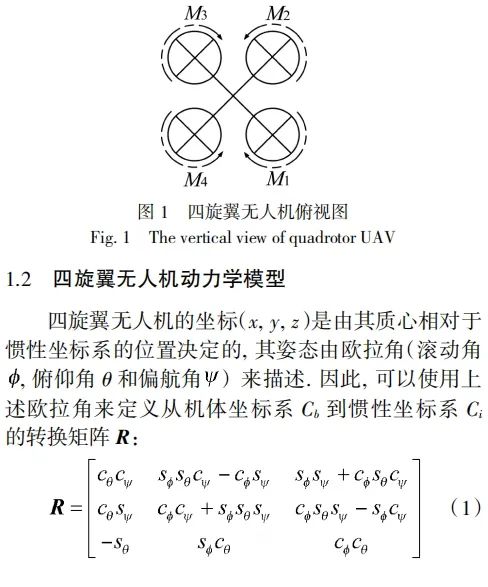
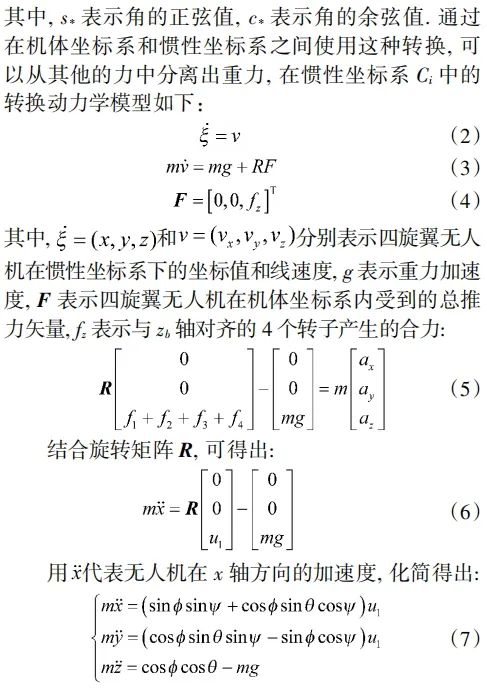
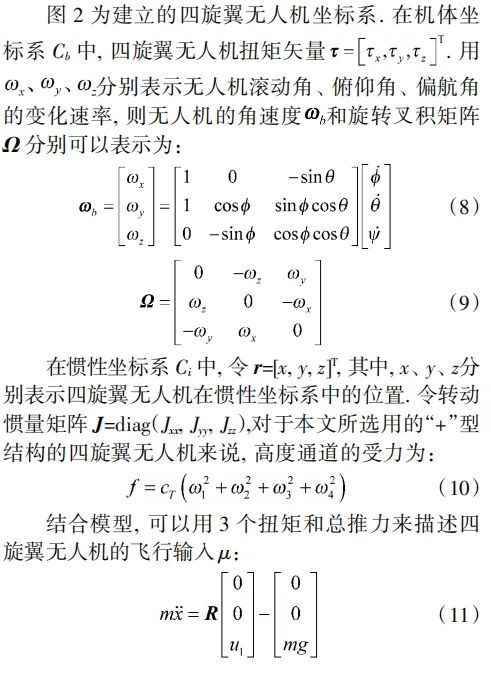
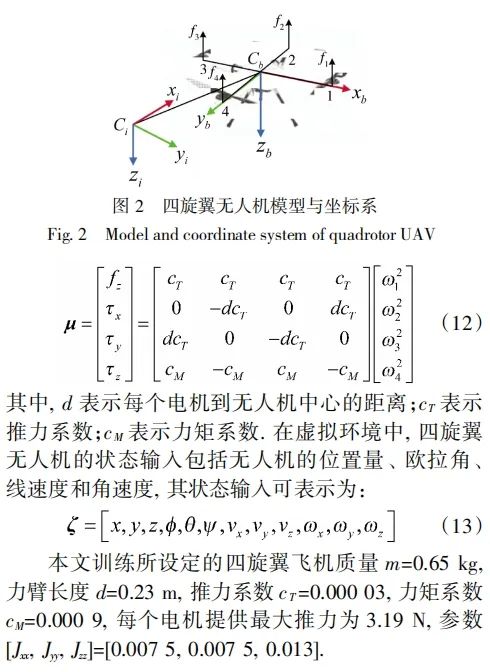
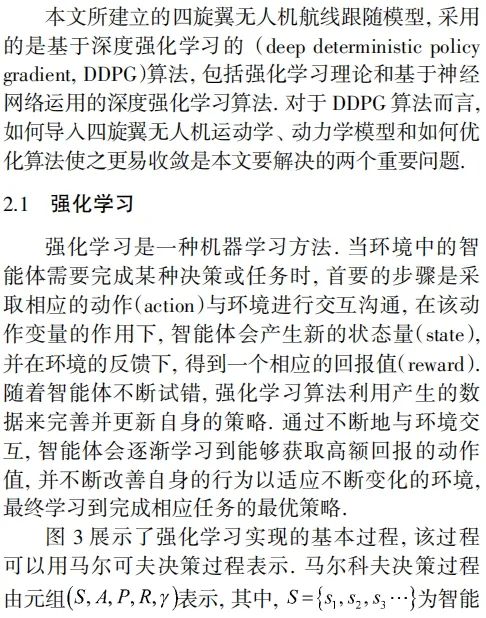
针对无人机在空中执行航线跟随任务时无法对未知环境作出合理应对措施等问题, 提出了一种基于深度强化学习的四 旋翼无人机航线跟随方法. 通过无人机受力分析、欧拉角变换建立四旋翼无人机动力学模型. 在深度强化学习的框架下, 分析无人机坐标值、欧拉角、速度值等相关因素, 对无人机的状态空间进行模糊化, 作为深度强化学习的状态输入. 相对于传统方法, 构建的四旋翼无人机非线性飞行运动学和动力学模型更为真实. 仿真结果表明, 在不断的训练和学习后, 四旋翼无人机能够对随机产生的任务航线进行高精度跟随.
关键词
四旋翼无人机, 航线跟随, 深度强化学习, 状态空间, 动力学模型

1 四旋翼无人机模型
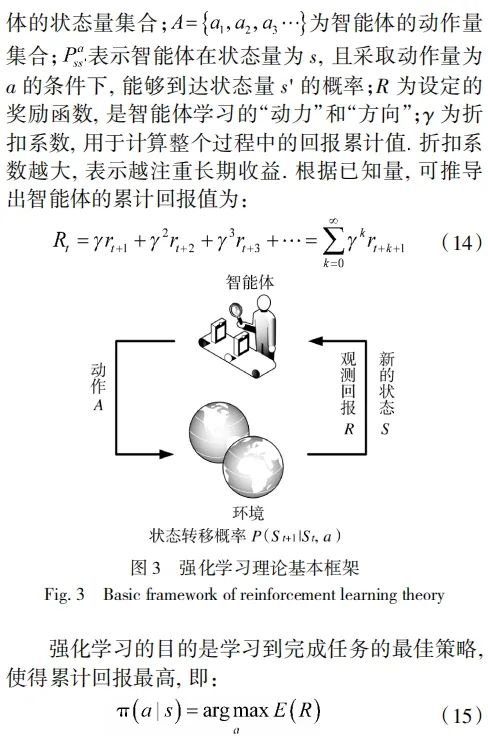
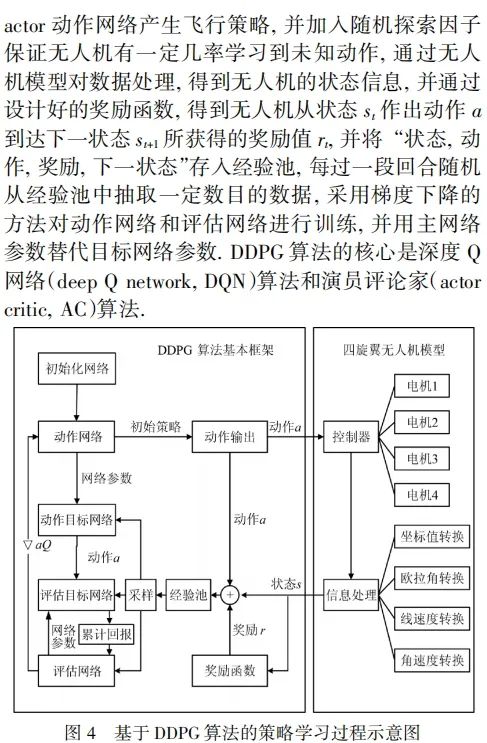
2 深度强化学习算法
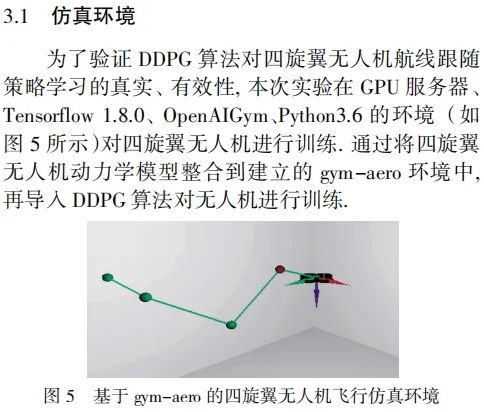
3 仿真实验与结果分析
4 结论
声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询” 发布

















 1015
1015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









