






卡尔曼滤波在deepSORT中一共有四个部分
- detection 转化为 track 时的卡尔曼滤波处理(初始化)
- 对已确认、未确认或即将删除的 track 进行卡尔曼滤波处理(预测)
- 将该帧的 detection 与之前匹配到的 track 进行更新,对其进行卡尔曼滤波处理(历史帧数匹配)
- 卡尔曼滤波计算马氏距离(马氏距离矩阵运算)
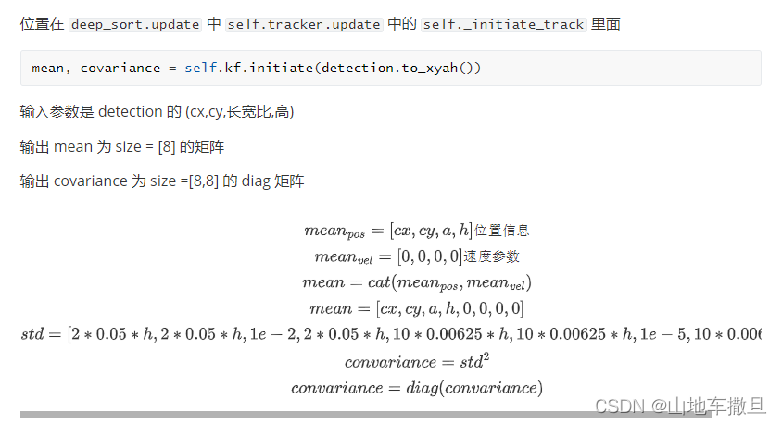
detection 转化为 track 时的卡尔曼滤波处理(初始化)
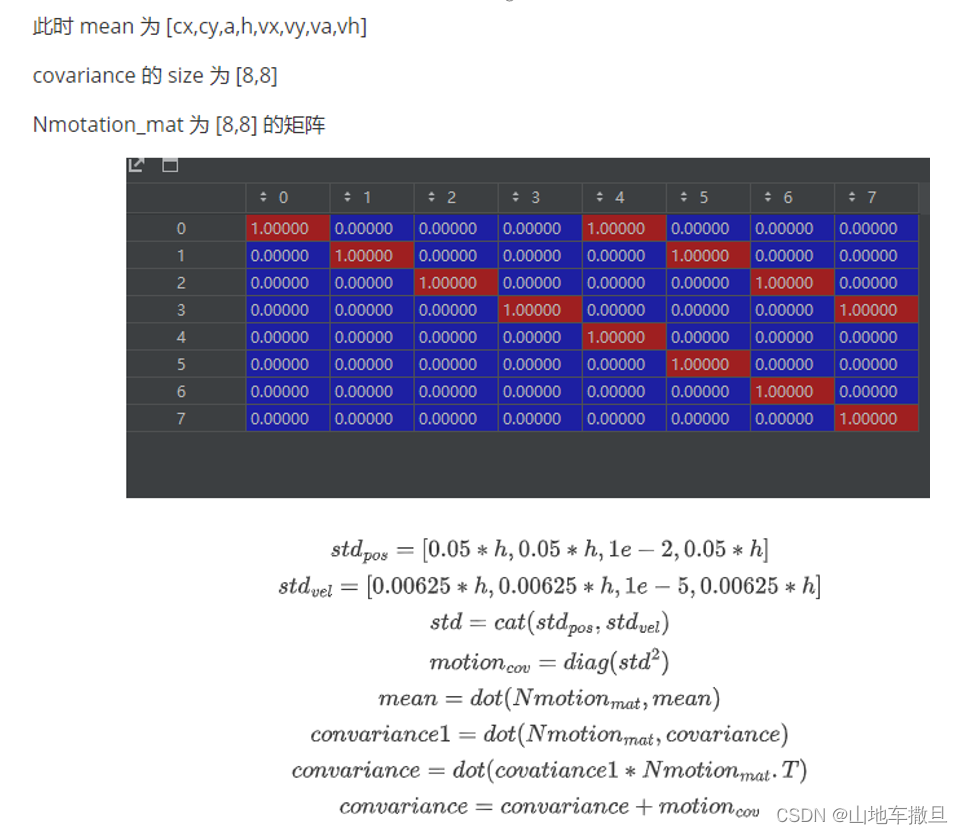
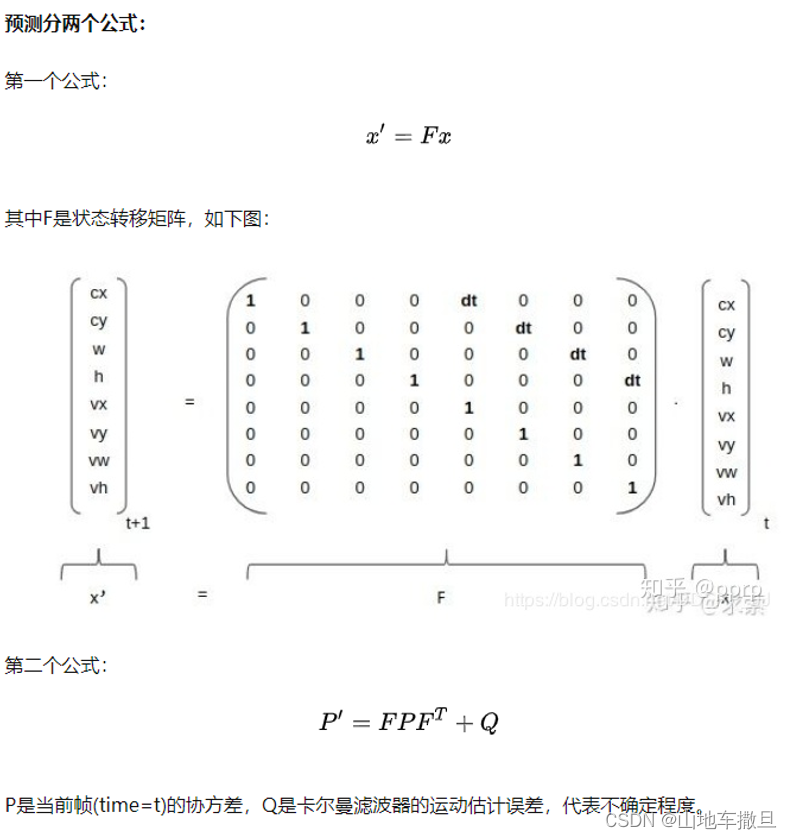
对已确认、未确认或即将删除的 track 进行卡尔曼滤波处理(预测)
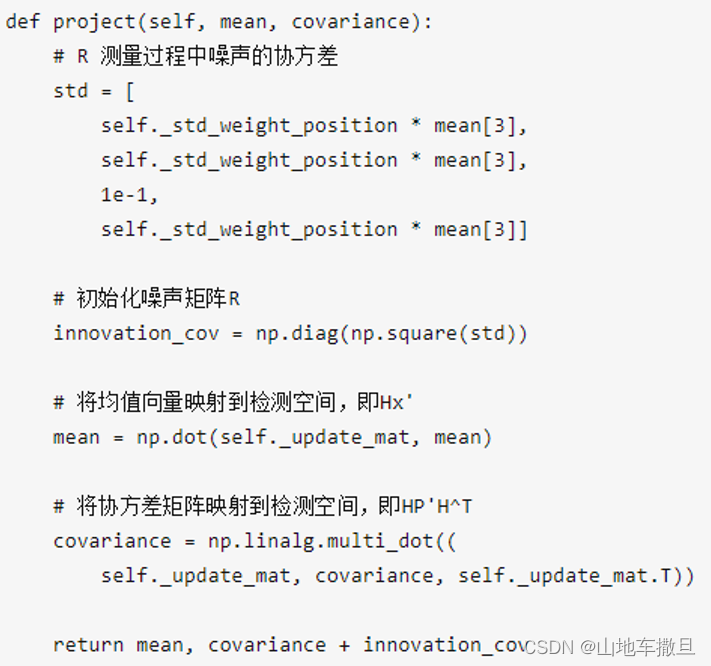
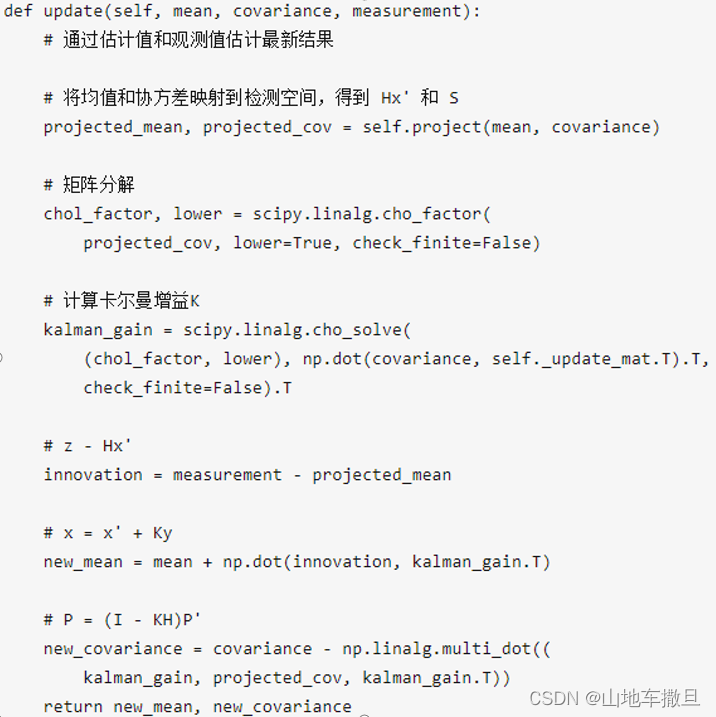
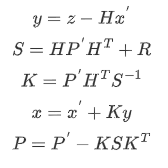
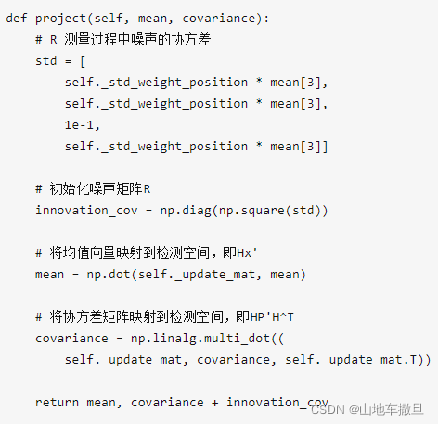
将该帧的 detection 与之前匹配到的 track 进行更新,对其进行卡尔曼滤波处理(更新)
卡尔曼滤波计算马氏距离(马氏距离矩阵运算)
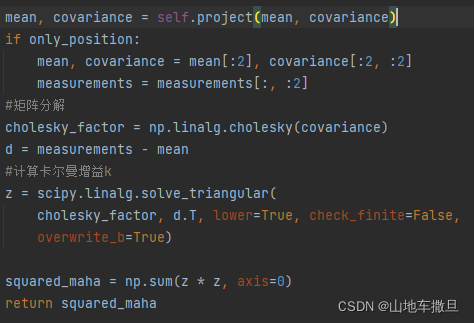

输出的squared是当前的detection对每一个存在的track的马氏距离的矩阵
如有疑问或指导意见,欢迎私信或评论区讨论!!!

















 7775
7775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









