







前言:
前面 2篇文章,
对标定进行了初步探讨,内容涉及9点和12点标定。本篇文章来对海康的N点标定的内部原理进行探讨,建议阅读此文之前,先阅读前面2篇文章
但是我不得不吐槽下,关于N点标定的原理的官方说明太少,只有民间有些只言片语的说明。
丛 这篇文章V社区-机器智能技术交流-常规定位引导项目入门必看 (v-club.com)才了解点N点标定得信息,文章作者在评论去说了这么一句话
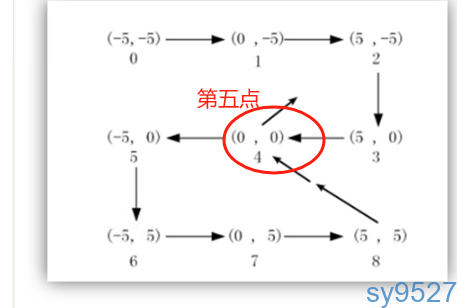
"第五点拍照位也就是拟合旋转中心的物理坐标,
12点标定得到的标定矩阵是做过旋转归一化的,旋转中心经过标定转换即为(0,0)点,
所有点经过标定转换都是相对于旋转中心的,此时加上这个拍照位坐标也就转换到实际物理坐标系了"
三点疑问
就上面这句话,我相信10个人看了,9个人会迷糊,主要可能下面几方面迷糊
1.第五点拍照位也就是拟合旋转中心的物理坐标 第5点为什么是拟合旋转中心的物理点
2.过旋转归一化 何为旋转归一化,为什么旋转归一化以后旋转中心就是(0,0) 点
3.所有点经过标定转换都是相对于旋转中心的,此时加上这个拍照位坐标也就转换到实际物理坐标系了 物理坐标的获取方式 大家是否理解
以上3点疑问后续为你慢慢说明白
N点标定 中的9点标定,N点标定模块和我们平时做的9点标定 没大的差别,提供9组像素和物理坐标就行了。
N点标定 中12 点标定与我这个系列文章12点标定 < 2D视觉定位引导系列 2 图解12点标定及仿真>没有太大的差别,如果能理解本人12点标定那篇文章内容的同学
理解N点标定将易如反掌。2者的区别 就是这个旋转归一化。
关键的第五点
认识下第5个点 第5点是标定的起始点,9点标定物理坐标就是在这个点的基础上进行正负XY偏移得到的,旋转标定也是在这个点完成的,旋转标定时机构XY停在这个点,只动角度部分。
什么是旋转归一化
到底何为旋转归一化。一句话总结就是将标定的起始点坐标设定为(0,0),也就是N点标定的第5个物理坐标,设定为(0,0),正常情况下这个坐标不会时(0,0),通过将坐标系的原点移动
到这个第5点就行了,具体操作如下。
假如原始物理坐标为(x1,y1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3110
3110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









