







引言:
相机标定是视觉引导的第一个课,此课不过关,后面难以为继,出了问题可能都不好找。我当初这块也是疑惑了很久,
经过理论和实验算是总结了一点小经验。关于标定这块没有想好如何规划,先想到哪里写哪里,后面在慢慢整理。视觉定位太
需要实践了,个人感觉理论就是那些初中知识,但是要想完全用好,需要用丰富的现场实验经验。
本系列标定文章大概覆盖以下几点内容
1.9点标定
2.12 点标定
3.坐标归一化
4.海康VM 单点标定原理和测试
5.相机静止运动标定的区别
6.相机轴标定
仿真程序介绍
为了更生动描述9/12点标定,也为了大家能更容易理解坐标系转换关系,只引入机械坐标系和相机坐标系,其他的坐标系就不提了,免得大家混。
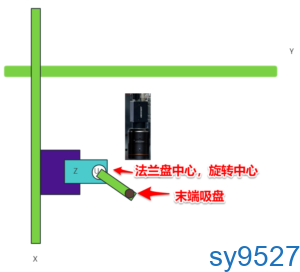
特意通过Halcon写了一段模拟机械手运动进行标定的程序。先简单介绍下这个模拟程序。下图就是模拟的一个简单使用场景,XYZθ轴,上相机固定。
可以想象一下吸盘上吸玻璃片,玻璃片上有容易定位识别的边或者线。相机通过识别边线的交点来作为标定的特征点
分几步将机构做了简化示意图
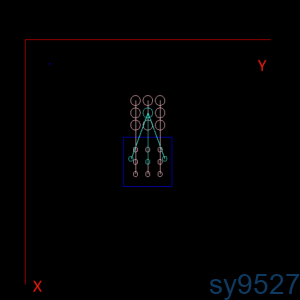
1.机械坐标系 在Halcon中定义了机械坐标系 10000*10000,原点位于左上角,为了方便计算,原点往下为X轴,原点往右边为Y轴。
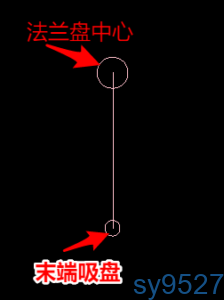
2.XYZθ 模组,只留了末端法兰盘和其连接的治具。以下图简化XYZθ模组
3.相机 蓝色框表示相机视野 2000*2000 像素。像素坐标尺寸和机械坐标尺寸是1:1,且相机视野的2个轴与机械坐标对齐,现实世界很难做倒,
这里只是模拟仿真,便于计算和理解。这样只要计算下图小圆圈的中心坐标,减去相机视野左角坐标 就可以得出像素坐标。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









