







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
提示:这里可以添加本文要记录的大概内容:
本篇博文主要用来记录汽车系统动力学课程的学习,仅供课程阶段参考,与实际工程应用还有较大距离。
本实例主要有以下任务。
1.建立汽车横摆角速度传递函数。
2.绘制不同车速下的汽车横摆角速度时域特性曲线。
3.绘制不同轮胎侧偏刚度下的汽车横摆角速度时域特性曲线。
4.绘制不同转动惯量下的汽车横摆角速度时域特性曲线。
5.绘制不同车速下的汽车横摆角速度频率特性曲线。
6.绘制不同轮胎侧偏刚度下的汽车横摆角速度频率特性曲线。
7.绘制不同转动惯量下的汽车横摆角速度频率特性曲线。
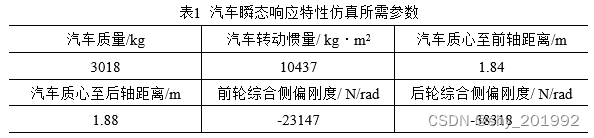
一、汽车系统仿真参数
二、建模及仿真
1.建立汽车横摆角速度传递函数

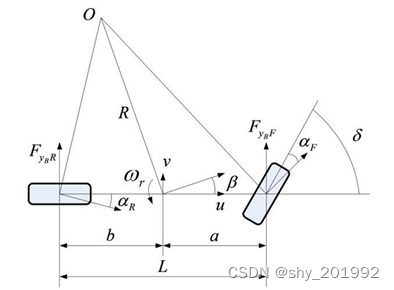
根据质心侧偏角度的定义:
β
=
v
u
(
1
)
\beta {\rm{ = }}\frac{v}{u}(1)
β=uv(1)
汽车横向的加速度为:
a
y
=
v
˙
+
u
ω
r
(
2
)
{a_y} = \dot v + u{\omega _r}(2)
ay=v˙+uωr(2)
前轮的侧偏角为:
α
1
=
β
+
a
ω
r
u
−
δ
(
3
)
{\alpha _1}{\rm{ = }}\beta {\rm{ + }}\frac{{a{\omega _r}}}{u} - \delta (3)
α1=β+uaωr−δ(3)
后轮的侧偏角为:
α
2
=
β
+
b
ω
r
u
(
4
)
{\alpha _2}{\rm{ = }}\beta {\rm{ + }}\frac{{b{\omega _r}}}{u}(4)
α2=β+ubωr(4)
根据牛顿第二定律:
m
(
v
˙
+
u
ω
r
)
=
k
1
α
1
+
k
2
α
2
(
5
)
{m(\dot v + u{\omega _r}) = {k_1}{\alpha _1}{\rm{ + }}{k_2}{\alpha _2}}(5)
m(v˙+uωr)=k1α1+k2α2(5)
I
z
w
˙
r
=
a
k
1
α
1
−
b
k
2
α
2
{{I_z}{{\dot w}_r} = a{k_1}{\alpha _1} - b{k_2}{\alpha _2}}
Izw˙r=ak1α1−bk2α2
将公式(1)(2)(3)(4)代入(5)中并转为矩阵形式:

对上述矩阵进行Laplace变换:

令 
令 
则上式转化为:

求解得到:
β
(
s
)
δ
(
s
)
=
(
s
−
A
22
)
B
1
+
A
12
B
2
(
s
−
A
11
)
(
s
−
A
22
)
−
A
12
A
21
(
9
)
\frac{{\beta (s)}}{{\delta (s)}} = \frac{{(s - {A_{22}}){B_1} + {A_{12}}{B_2}}}{{(s - {A_{11}})(s - {A_{22}}) - {A_{12}}{A_{21}}}}(9)
δ(s)β(s)=(s−A11)(s−A22)−A12A21(s−A22)B1+A12B2(9)
ω
r
(
s
)
δ
(
s
)
=
(
s
−
A
11
)
B
2
+
A
21
B
1
(
s
−
A
11
)
(
s
−
A
22
)
−
A
12
A
21
(
10
)
\frac{{{\omega _r}(s)}}{{\delta (s)}} = \frac{{(s - {A_{11}}){B_2} + {A_{21}}{B_1}}}{{(s - {A_{11}})(s - {A_{22}}) - {A_{12}}{A_{21}}}}(10)
δ(s)ωr(s)=(s−A11)(s−A22)−A12A21(s−A11)B2+A21B1(10)
2.绘制不同车速下的汽车横摆角速度时域特性曲线
车速分别选取10m/s、20m/s和30m/s;在仿真时间0s时给前轮一个阶跃信号,使前轮转角从0°转到10°,并保持不变。
解:根据公式(6)在MATLAB中编程lianxi52.m,运行后得到结果如图(2):
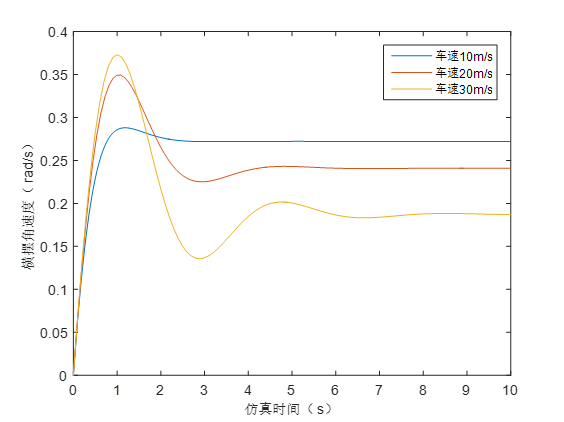
图2 不同速度下的汽车横摆角速度时域特性曲线
根据仿真结果来看,随着车速的增加,汽车首次达到稳态横摆角速度的反应时间减小;汽车最大的横摆角速度大于稳态值的幅度,即超调量,随着车速的增大而增加;汽车进入稳态值95%~105%所需的稳定时间,随着车速的增大而增加。
3.绘制不同轮胎侧偏刚度下的汽车横摆角速度时域特性曲线
选取车速为20m/s,前、后轮胎综合侧偏刚度由-23147N/rad、-38318N/rad变为 -33124N/rad、-69972N/rad,其他条件不变。
解:根据公式(6)在MATLAB中编程lianxi53.m,运行后得到结果如图(2):
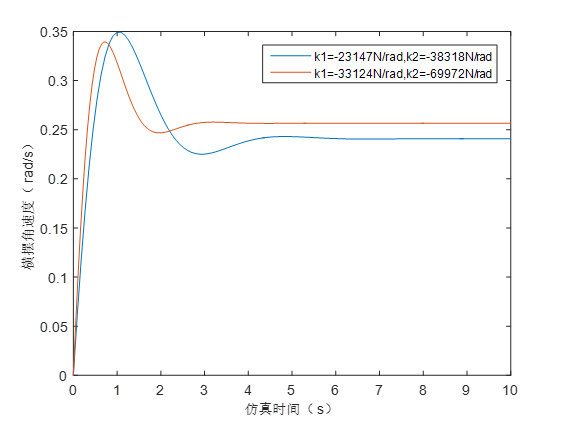
图3 不同轮胎侧偏刚度下的汽车横摆角速度时域特性曲线
根据仿真结果来看,随着轮胎侧偏刚度绝对值的增加,汽车首次达到稳态横摆角速度的反应时间减小;汽车横摆角速度的超调量,随着轮胎侧偏刚度绝对值的增大而减小;汽车进入稳态值95%~105%所需的稳定时间,随着轮胎侧偏刚度绝对值的增大而减小。
4.绘制不同转动惯量下的汽车横摆角速度时域特性曲线
选取车速为20m/s,转动惯量由10437 kg·m2变为5537 kg·m2和20237 kg·m2,其他条件不变。
解:根据公式(6)在MATLAB中编程lianxi54.m,运行后得到结果如图(4):
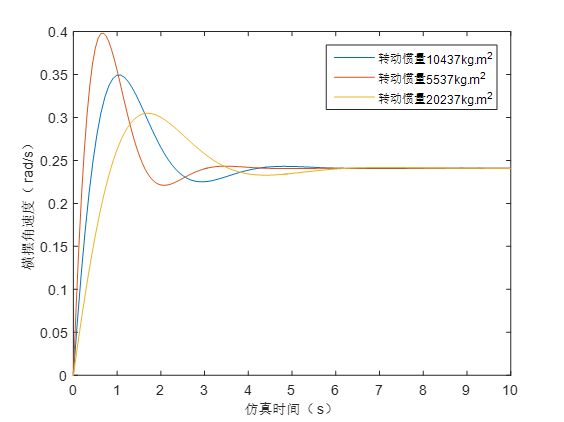
图4 不同转动惯量下的汽车横摆角速度时域特性曲线
根据仿真结果来看,随着汽车转动惯量的增加,汽车首次达到稳态横摆角速度的反应时间减小;汽车横摆角速度的超调量,随着汽车转动惯量的增大而减小;汽车进入稳态值95%~105%所需的稳定时间,随着汽车转动惯量的增大而增大。
5.绘制不同车速下的汽车横摆角速度频率特性曲线
车速分别选取10m/s、20m/s和30m/s。
解:根据公式(6)在MATLAB中编程lianxi55.m,运行后得到结果如图(5):
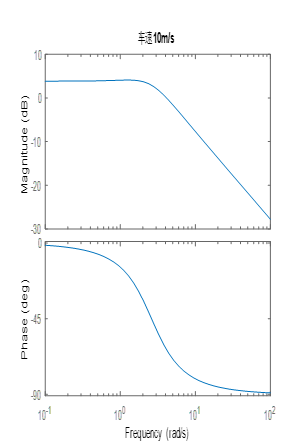
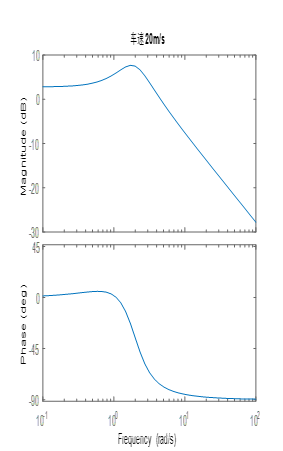
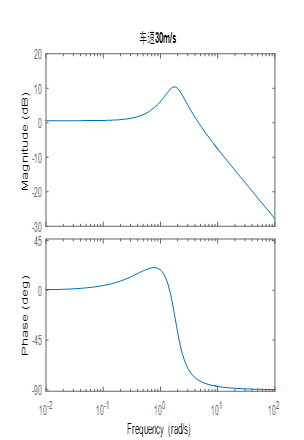
图5 不同速度下的汽车横摆角速度频域特性曲线
对图(5)中的结果整理后得到表(1)的数据:
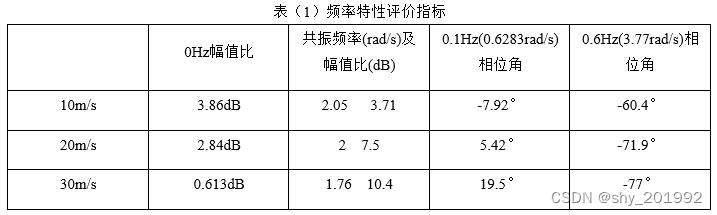
根据表(1)的结果,随着车速的增加,稳态的横摆角速度增益减小,0.1Hz和0.6Hz对应的相位角增大,意味着汽车对转向盘转角.的响应速度变慢。
6.绘制不同轮胎侧偏刚度下的汽车横摆角速度频率特性曲线
选取车速为20m/s,前、后轮胎综合侧偏刚度由-23147N/rad、-38318N/rad变为 -33124N/rad、-69972N/rad,其他条件不变。
解:根据公式(6)在MATLAB中编程lianxi56.m,运行后得到结果如图(6):
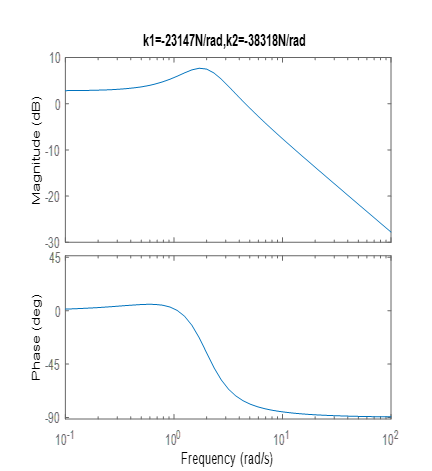
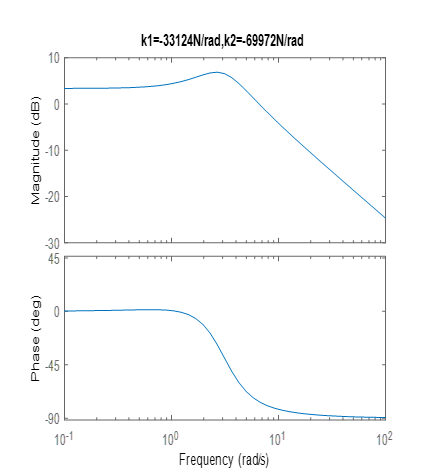
图6 不同轮胎侧偏刚度下的汽车横摆角速度时域特性曲线
对图(6)中的结果整理后得到表(2)的数据:
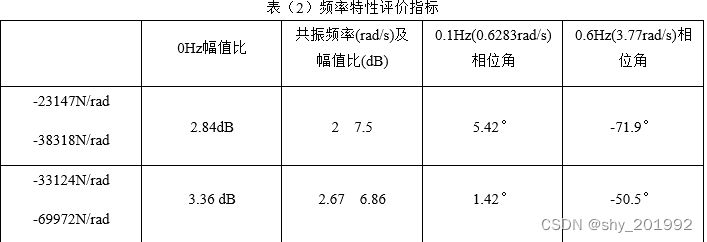
根据表(2)的结果,随着轮胎侧偏刚度绝对值的增加,稳态的横摆角速度增益增大,0.1Hz和0.6Hz对应的相位角减小,意味着汽车对转向盘转角.的响应速度变快。
7.绘制不同转动惯量下的汽车横摆角速度频率特性曲线
选取车速为20m/s,转动惯量由10437 kg·m2变为5537 kg·m2和20237 kg·m2,其他条件不变。
解:根据公式(6)在MATLAB中编程lianxi57.m,运行后得到结果如图(7):
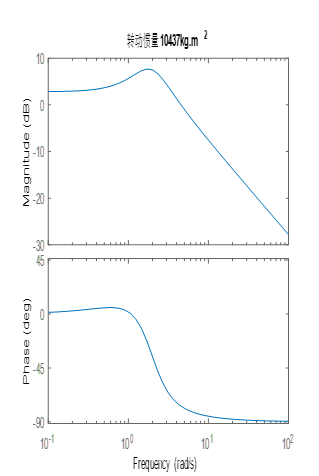
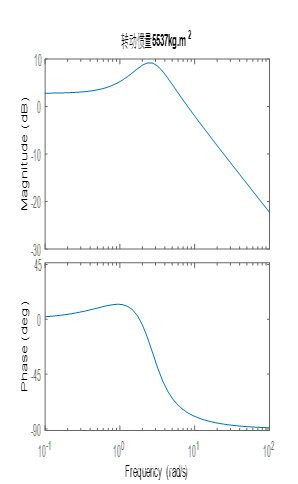

图7 不同转动惯量下的汽车横摆角速度频域特性曲线
对图(7)中的结果整理后得到表(3)的数据:
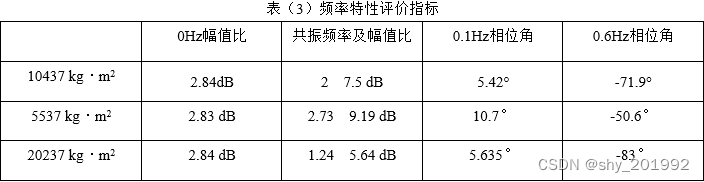
根据表(3)的结果,随着汽车转动惯量的增加,稳态的横摆角速度增益几乎不变,0.1Hz对应的相位角减小,意味着汽车对缓慢转动转向盘的响应速度变快;0.6Hz对应的相位角增大,意味着汽车对快速转动转向盘的响应速度变慢。
三、文件脚本附录
simulink模型搭建的具体内容在本篇文章附件,可在matlab2015b及以上版本打开并运行,仅供参考。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









